机器学习---bagging与随机森林
1. bagging算法
集成学习有两个流派:一个是boosting派系,它的特点是各个弱学习器之间有依赖关系。另一种是
bagging流派,它的特点是各个弱学习器之间没有依赖关系,可以并行拟合。
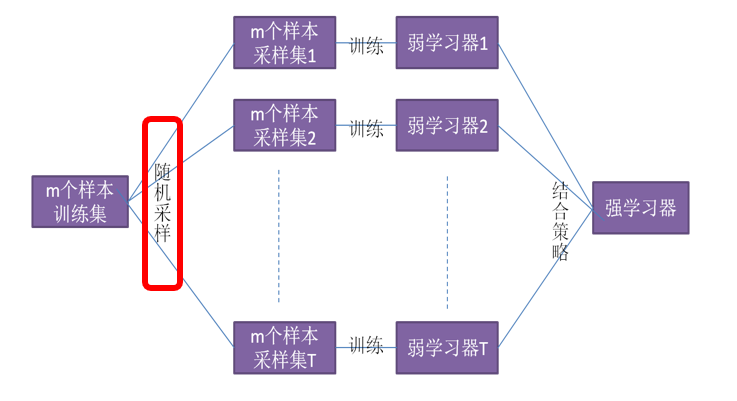
Bagging的弱学习器之间的确没有boosting那样的联系,是“随机采样”。
随机采样(bootsrap)就是从训练集里面采集固定个数的样本,但是每采集一个样本后,都将样本放
回。也就是说,之前采集到的样本在放回后有可能继续被采集到。对于Bagging算法,一般会随机
采集和训练集样本数一样个数的样本。这样得到的采样集和训练集样本的个数相同,但是样本内容
不同。如果我们对有m个样本的训练集做 T 次的随机采样,则由于随机性,T个采样集各不相同。
对于一个样本,它在某一次含 m 个样本的训练集的随机采样中,每次被采集到的概率是 1/m。不
被采集到的概率为 1-1/m。如果 m 次采样都没有被采集中的概率是 [(1-1/m)]^m。当?m→∞时,[(1-
1/m)]^m→1/e ?≈"0.368"。也就是说,在bagging的每轮随机采样中,训练集中大约有36.8%的数据
没有被采样集采集中。对于这部分大约36.8%的数据没有被采样到,我们常常称之为袋外数据(Out
Of Bag, 简称OOB)。这些数据没有参与训练集模型的拟合,因此可以用来检测模型的泛化能力。
Bagging算法对于弱学习器没有限制,最常用的是决策树和神经网络。
Bagging结合策略:分类问题,通常使用简单投票法,得到最多票数的类别或者类别之一为最终的
模型输出。回归问题,通常使用简单平均法,对T个弱学习器得到的回归结果进行算术平均得到最
终的模型输出。
Bagging方差与偏差:Bagging每次都进行采样来训练模型。因此泛化能力很强,对于降低模型的
方差很有作用。对于训练集的拟合程度差一些,模型的偏倚会大一些。
1.2 bagging算法流程
输入:样本集D={(x_1,y_1 ),(x_2,y_2 ),…,(x_m,y_m)} ,弱学习器算法ξ
输出:强分类器f(x)
过程:1)对于t=1,2,…,T:
? ? ? ? ? ? ? ?a)对训练集进行第?t 次随机采样,共采集 m 次,得到包含 m 个样本的采样集 D_t
? ? ? ? ? ? ? ?b)用采样集?D_t? 训练第 t 个弱学习器G_t (x)=ξ(D_t)
2) 如果是分类算法预测,则 T 个弱学习器投出最多票数的类别或者类别之一为最终类别。如果是
回归算法,T 个弱学习器得到的回归结果进行算术平均得到的值为最终的模型输出。
3. 随机森林
随机森林(Random Forest,以下简称RF)是Bagging算法的进化版,RF使用了CART决策树作为弱学
习器,RF改进了CART决策树的构建过程:普通的决策树,在节点上所有的n个样本特征中选择一
个最优的特征来做决策树的左右子树划分,RF通过随机选择节点上的一部分样本特征,这个数字
小于n,假设为n_sub,然后在这些随机选择的n_sub个样本特征中,选择一个最优的特征来做决策
树的左右子树划分,这样进一步增强了模型的泛化能力。
随机森林算法流程:
输入:样本集D={(x_1,y_1 ),(x_2,y_2 ),…,(x_m,y_m)} ,弱学习器算法ξ,弱分类器迭代次数 T
输出:强分类器f(x)
过程:1)对于t=1,2,…,T:
? ? ? ? ? ? ? ? a)对训练集进行第?t 次随机采样,共采集?m 次,得到包含 m 个样本的采样集 D_t
? ? ? ? ? ? ? ? b)用采样集?D_t? 训练第 t 个决策树模型G_t (x)=ξ(D_t),训练决策树模型的节点的时,在
节点上所有的样本特征中选择一部分样本特征, 在这些随机选择的部分样本特征中选择一个最优
的特征来做决策树的左右子树划分。
2) 如果是分类算法预测,则 T 个弱学习器投出最多票数的类别或者类别之一为最终类别。如果是
回归算法,T 个弱学习器得到的回归结果进行算术平均得到的值为最终的模型输出。
RF在实际应用中的良好特性,基于RF,有很多变种算法,应用也很广泛,不光可以用于分类回
归,还可以用于特征转换,异常点检测等。
extra trees是RF的变种, 原理和RF类似,区别为:
1) 对于每个决策树的训练集,RF采用的是随机采样bootstrap来选择采样集作为每个决策树的训
练集,而extra trees一般不采用随机采样,即每个决策树采用原始训练集。
2) 在选定了划分特征后,RF的决策树会基于基尼系数、均方差之类的原则,选择一个最优的特
征值划分点,这和传统的决策树相同。但extra trees比较激进,会随机的选择一个特征值来划分决
策树。
从第二点可以看出,由于随机选择了特征值的划分点位,而不是最优点位,这样会导致生成的决策
树的规模一般会大于RF所生成的决策树。也就是说,模型的方差相对于RF进一步减少,但是偏倚
相对于RF进一步增大。在某些时候,extra trees的泛化能力比RF更好。
Totally Random Trees Embedding(TRTE)是一种非监督学习的数据转化方法。它将低维的数据集
映射到高维,从而让映射到高维的数据更好的运用于分类回归模型。我们知道,在支持向量机中运
用了核方法来将低维的数据集映射到高维,此处TRTE提供了另外一种方法。
TRTE在数据转化的过程也使用了类似于RF的方法,建立T个决策树来拟合数据。当决策树建立完
毕以后,数据集里的每个数据在T个决策树中叶子节点的位置也定下来了。比如我们有3颗决策
树,每个决策树有5个叶子节点,某个数据特征x划分到第一个决策树的第2个叶子节点,第二个决
策树的第3个叶子节点,第三个决策树的第5个叶子节点。则x映射后的特征编码为(0,1,0,0,0,?0,0,1,
0,0,?0,0,0,0,1),有15维的高维特征。这里特征维度之间加上空格是为了强调三颗决策树各自的子
编码。映射到高维特征后,可以继续使用监督学习的各种分类回归算法了。
Isolation Forest(IForest)是一种异常点检测的方法,使用了类似于RF的方法来检测异常点。对
于在T个决策树的样本集,IForest也会对训练集进行随机采样,但是采样个数不需要和RF一样,对
于RF,需要采样到采样集样本个数等于训练集个数。但是IForest不需要采样这么多,一般来说,
采样个数要远远小于训练集个数?为什么呢?因为我们的目的是异常点检测,只需要部分的样本我
一般就可以将异常点区别出来了。
对于每一个决策树的建立, IForest采用随机选择一个划分特征,对划分特征随机选择一个划分阈
值。这点也和RF不同。另外,IForest一般会选择一个比较小的最大决策树深度max_depth,原因同
样本采集,用少量的异常点检测一般不需要这么大规模的决策树。
对于异常点的判断,则是将测试样本点?x 拟合到T颗决策树。计算在每颗决策树上该样本的叶子节
点的深度h_t (x) 。从而可以计算出平均高度h(x)。此时我们用下面的公式计算样本点 x 的异常概
率:![]() ,?其中,m为样本个数,c(m) 的表达式为:
,?其中,m为样本个数,c(m) 的表达式为:![]()
?ζ为欧拉常数,s(x,m)的取值范围是[0,1],取值越接近于1,则是异常点的概率也越大。
RF算法作为一个可以高度并行化的算法,RF在大数据大有可为。 这里也对常规的随机森林算法的
优缺点做一个总结。RF的主要优点有:
①训练可以高度并行化,对于大数据时代的大样本训练速度有优势。
②由于可以随机选择决策树节点划分特征,这样在样本特征维度很高时,仍然能高效训练模型。
③在训练后,可以给出各个特征对于输出的重要性
④由于采用了随机采样,训练出的模型的方差小,泛化能力强。
⑤相对于Boosting系列的Adaboost和GBDT, RF实现比较简单。
⑥对部分特征缺失不敏感。
RF的主要缺点有:
①在某些噪音比较大的样本集上,RF模型容易陷入过拟合。
②取值划分比较多的特征容易对RF的决策产生更大的影响,从而影响拟合的模型的效果。
?
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【SpringCloud笔记】(9)分布式配置中心之Config
- 【操作系统】|浅谈IO模型
- C++&Python&C# 三语言OpenCV从零开发(4):视频流读取
- Django开发_5_APP基础操作
- HTML5-简单拖放操作
- 如何群发邮件比较好?Gmail怎么群发邮件?
- 手把手带你死磕ORBSLAM3源代码(十八)Tracking.h引用头文件
- 【白盒测试】逻辑覆盖和路径测试的设计方法
- 在Linux上对固态硬盘进行分区、格式化和挂载的步骤
- 调用哪些API可以实现批量抓取京东平台商品详情数据?