Nvidia Jetson AGX Orin使用CAN与底盘通信(ROS C++ 驱动)
文章目录
一、Nvidia Jetson AGX Orin使用CAN通信
参考:https://blog.csdn.net/vonct/article/details/129055892,使用杜邦线将Nvidia Jetson AGX Orin的CAN口(底盘CANL和CANH连接对应Orin的CANL和CANH,具体底盘CANL和CANH接口可能要看Nvidia Jetson AGX Orin说明书)接出来。
1.1 CAN使能配置修改GPIO口功能
由于默认的CAN引脚不是配置为CAN,因此需要修改4个寄存器的值。具体可以从文档看到:
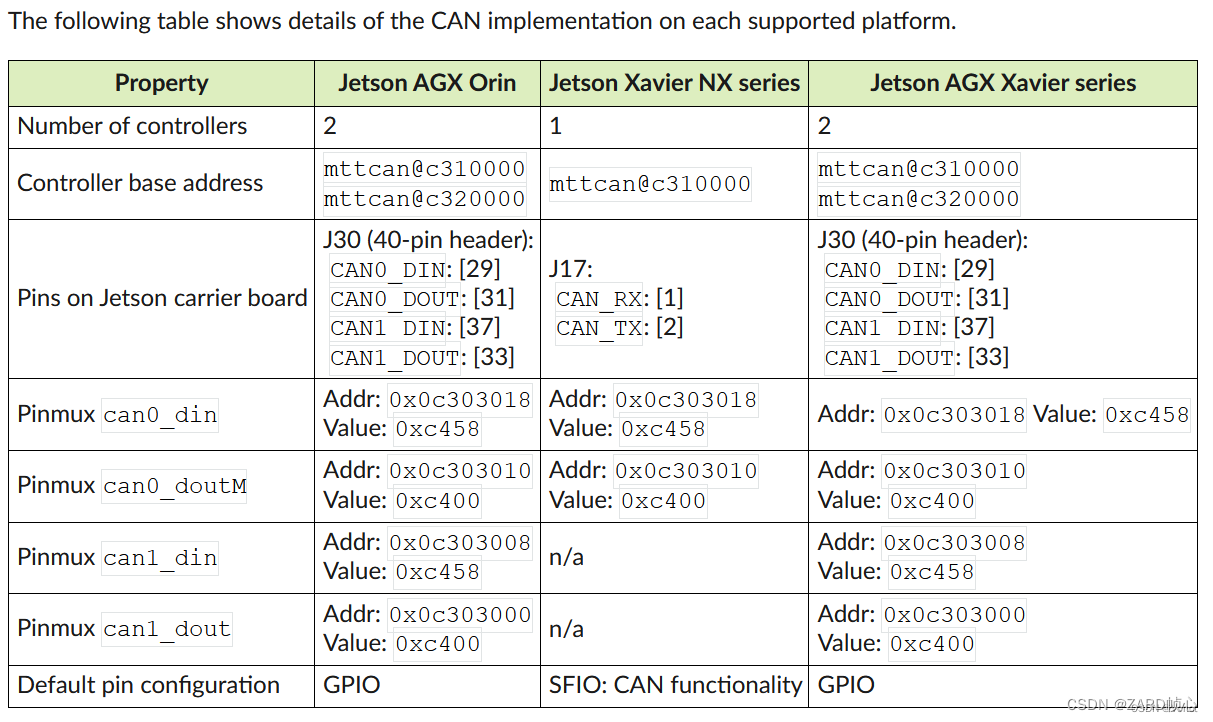
以Orin为例,图中Addr就是寄存器地址,value就是需要写入的值
(1)使用busybox修改寄存器的值
sudo apt-get install busybox
sudo busybox devmem 0x0c303018 w 0xc458
sudo busybox devmem 0x0c303010 w 0xc400
sudo busybox devmem 0x0c303008 w 0xc458
sudo busybox devmem 0x0c303000 w 0xc400
(2)挂载CAN内核
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
(3)CAN属性设置
例如将CAN0波特率设置成500k,注意,配置前需要先关闭can
sudo ip link set down can0
sudo ip link set can0 type can bitrate 500000
sudo ip link set up can0
将上诉代码写进shell文件,每次使用之前要运行:
sudo busybox devmem 0x0c303018 w 0xc458
sudo busybox devmem 0x0c303010 w 0xc400
sudo busybox devmem 0x0c303008 w 0xc458
sudo busybox devmem 0x0c303000 w 0xc400
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
sudo ip link set down can0
sudo ip link set can0 type can bitrate 500000
sudo ip link set up can0
1.2 can收发测试
用can-utils进行简单的can收发测试,后续将用SocketCan结合ROS。
sudo apt-get install can-utils
cansend can0 0E2#05.00.00.00.00.00.00.00 #cansend can0/1 [can_id]#[八字节数据]
cangen -v can0 #随机发送
candump can0 #接受can帧


二、通过CAN协议编写CAN的SocketCan ROS1驱动程序
2.1 通讯协议
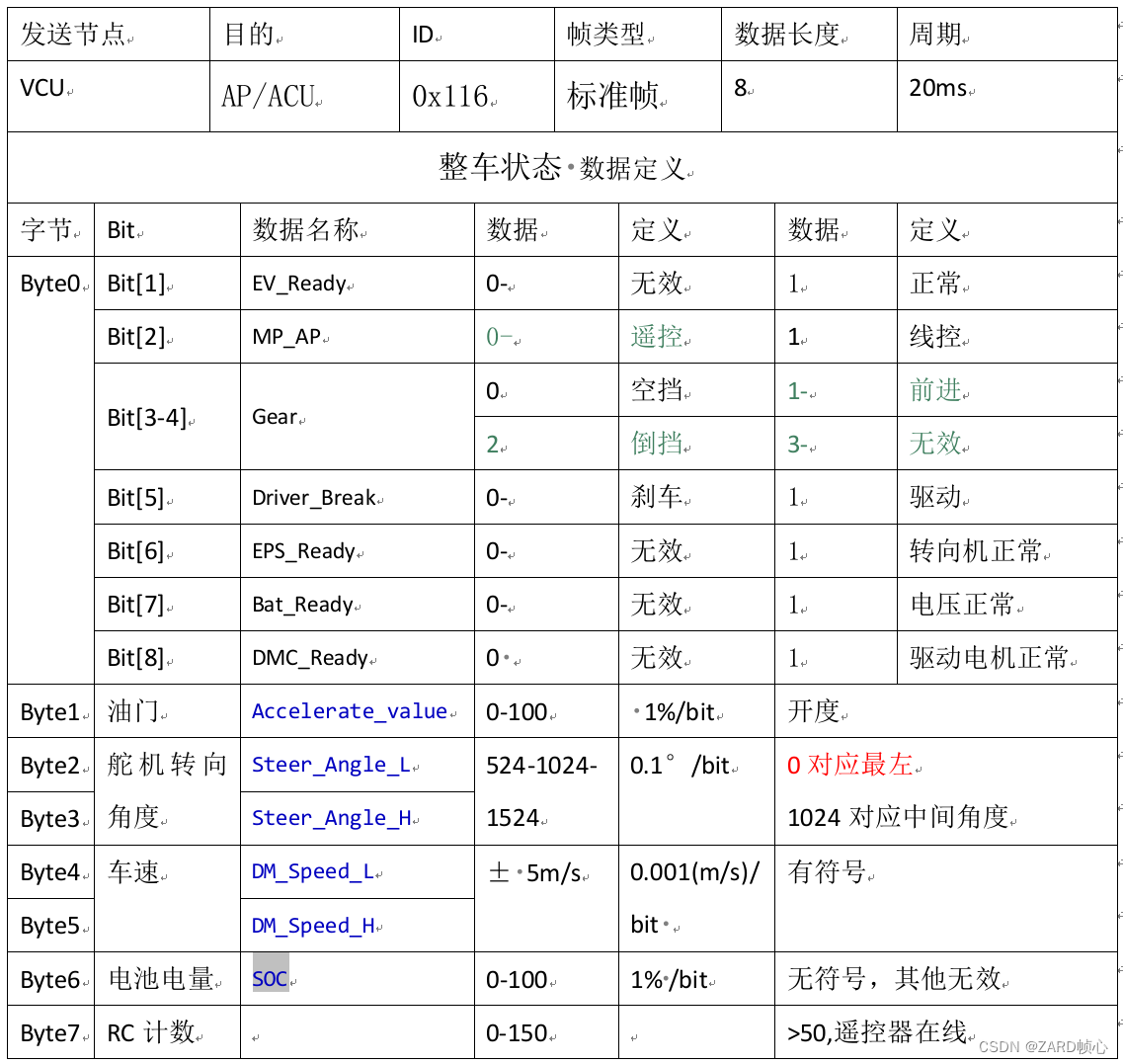
(1)小车反馈的整车数据
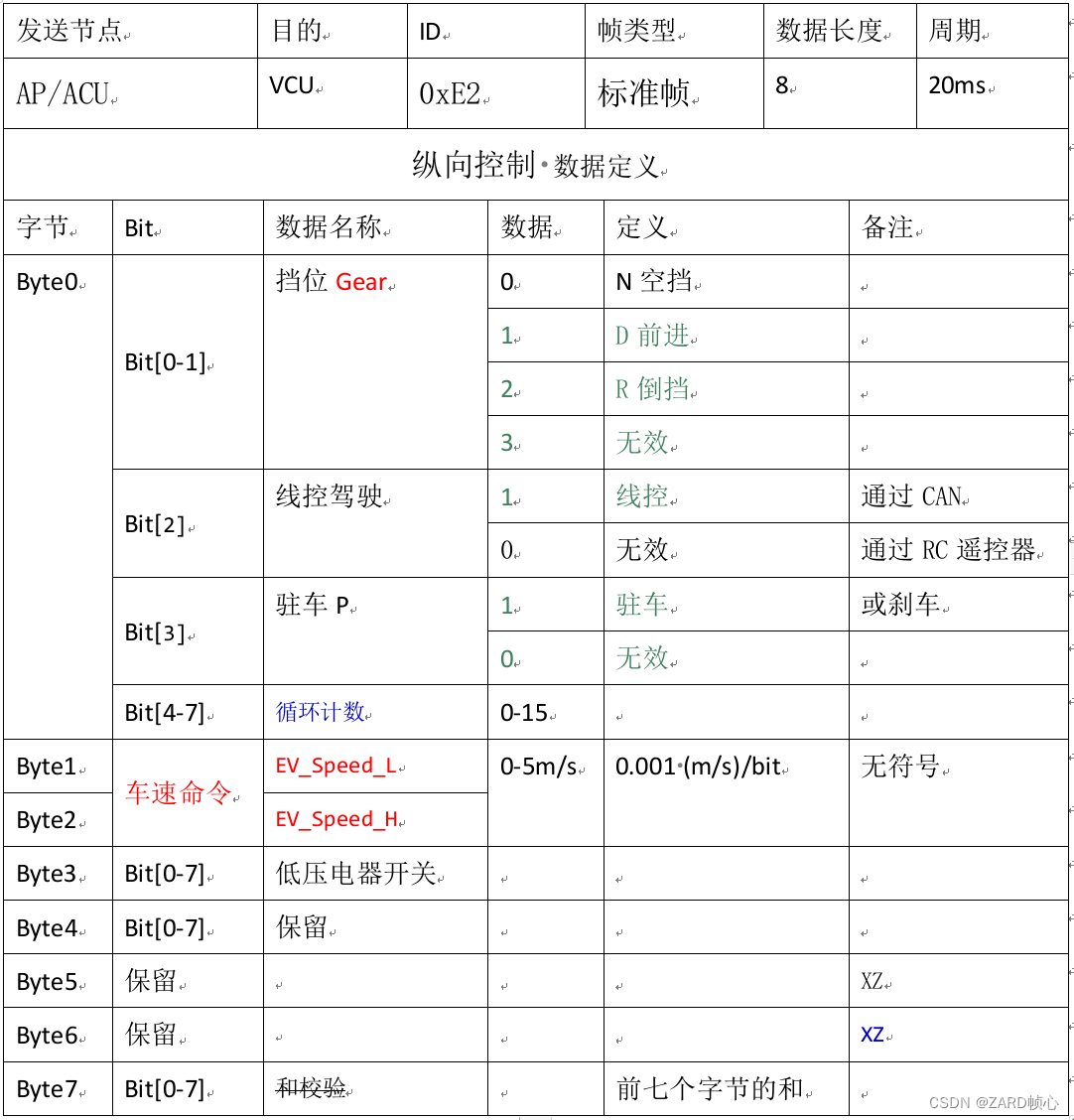
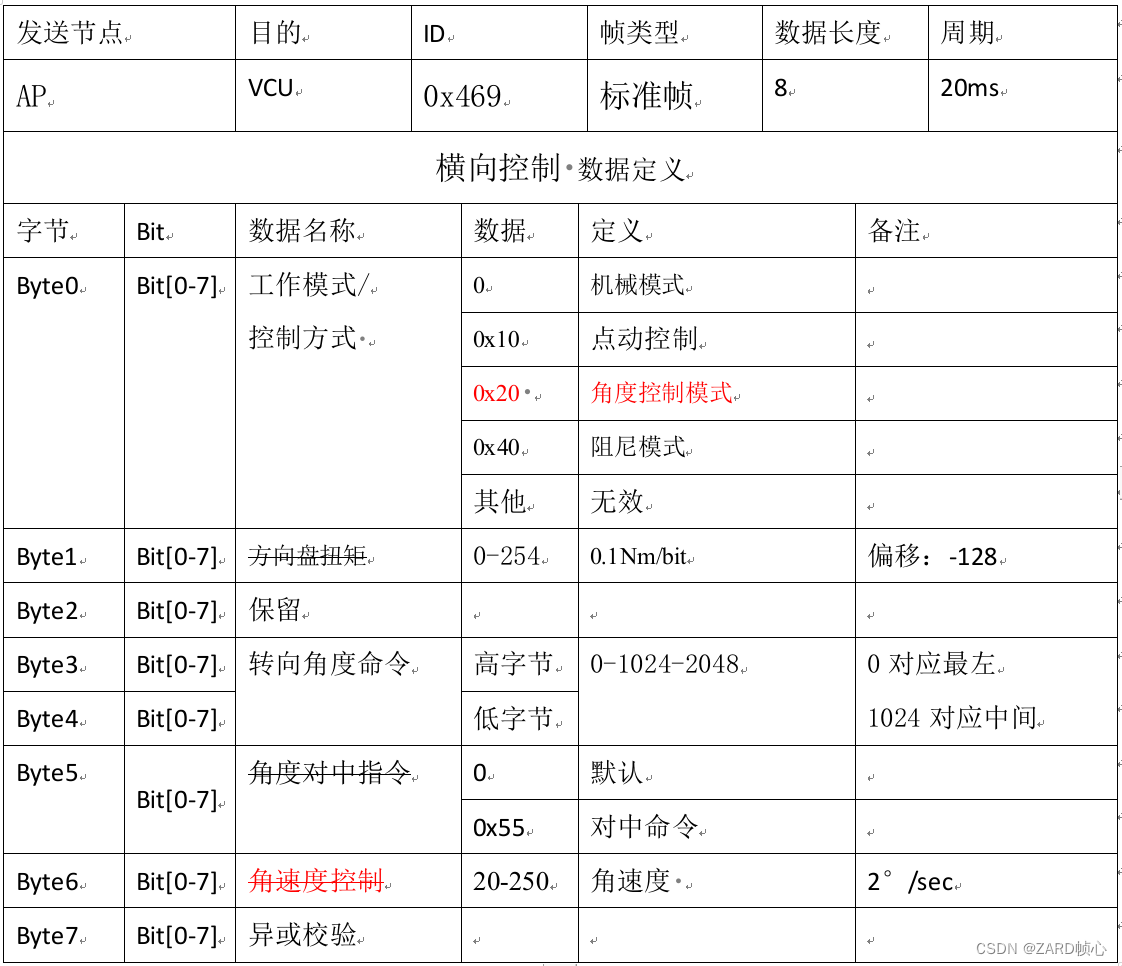
(2)线控指令
不同于UDP,类似于串口通信,可以参考我串口通信的文章
代码写好之后遇到的问题:
(1)接收数据的时候反馈慢
解决:去掉代码中的 spin频率控制;
(2)速度控制时无法换档
解决:每次发速度之前,发送速度指令清零;
(3)节点关闭时速度仍在
解决:在析构函数中发送退出线控指令;
(4)将Autoware参数(TwistStamped)写进Launch方便调参
优化并调试后的代码如下(其中协议中写的角度和速度指定bit与实际值的比例关系似乎不太对,需要实际调试的时候优化):
2.2 接收数据节点
can_receive_node.cpp
#include "can_ros1_driver/can_receive.hpp"
int main(int argc, char **argv)
{
ros::init(argc, argv, "can_receive_node");
canControl can_control;
ros::spin();
return 0;
}
can_receive.hpp
#ifndef CAN_H_
#define CAN_H_
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <net/if.h>
#include <iostream>
#include <string>
#include <cmath>
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "geometry_msgs/Twist.h"
#include "nav_msgs/Odometry.h"
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
class canControl
{
public:
// 0 初始化
canControl();
// 1 接收CAN消息
void receiveCanData();
// 1.1 解析数据
std::vector<int16_t> hexToShort(const std::vector<uint8_t> &hex_data);
// 1.2 推算里程计并发布
void publishOdometry(double linear_velocity, double angular_velocity, double Steer_Angle);
// 2 析构函数
~canControl();
private:
ros::NodeHandle nh_;
// 轴距
double wheel_base;
// 套接字参数
struct ifreq ifr;
struct sockaddr_can can_addr;
int sockfd;
int ret;
// 接收的数据
struct can_frame frame;
// 当前里程计
double position_x_;
double position_y_;
double yaw;
// 发布速度和里程计
ros::Publisher pub_;
ros::Publisher pub_Odom;
tf::TransformBroadcaster tf_broadcaster_;
};
#endif // CAN_H_
can_receive.cpp
#include "can_ros1_driver/can_receive.hpp"
// 0 初始化
canControl::canControl() : nh_("~")
{
// 1 初始化ROS节点
nh_.param<double>("wheel_base", wheel_base, 1.0);
position_x_ = 0.0;
position_y_ = 0.0;
yaw = 0.0;
/* 打开套接字 */
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (0 > sockfd)
{
perror("socket error");
exit(EXIT_FAILURE);
}
/* 指定can0设备 */
ifr = {0};
can_addr = {0};
frame = {0};
strcpy(ifr.ifr_name, "can0");
ioctl(sockfd, SIOCGIFINDEX, &ifr);
can_addr.can_family = AF_CAN;
can_addr.can_ifindex = ifr.ifr_ifindex;
/* 将can0与套接字进行绑定 */
if (0 > bind(sockfd, (struct sockaddr *)&can_addr, sizeof(can_addr)))
{
perror("bind error");
close(sockfd);
exit(EXIT_FAILURE);
}
// 创建用于反馈速度指令的发布者
pub_ = nh_.advertise<geometry_msgs::Twist>("/feedback_twist", 1000);
pub_Odom = nh_.advertise<nav_msgs::Odometry>("/panda_odom", 100);
receiveCanData();
}
// 2 接收CAN串口消息
void canControl::receiveCanData()
{
while (ros::ok())
{
/* 接收数据 */
if (0 > read(sockfd, &frame, sizeof(struct can_frame)))
{
perror("read error");
break;
}
/* 校验是否接收到错误帧 */
if (frame.can_id & CAN_ERR_FLAG)
{
printf("Error frame!\n");
break;
}
/* 校验帧格式 */
// if (frame.can_id & CAN_EFF_FLAG) // 扩展帧
// printf("扩展帧 <0x%08x> ", frame.can_id & CAN_EFF_MASK);
// else // 标准帧
// printf("标准帧 <0x%03x> ", frame.can_id & CAN_SFF_MASK);
/* 校验帧类型:数据帧还是远程帧 */
if (frame.can_id & CAN_RTR_FLAG)
{
printf("remote request\n");
continue;
}
/* 打印数据长度 */
// printf("[%d] ", frame.can_dlc);
/* 打印数据 */
std::vector<uint8_t> buff;
for (int i = 0; i < frame.can_dlc; i++)
{
// 这里的%02x表示以两位十六进制数的形式输出,并且若不足两位则在前面补0。
// printf("%02x ", frame.data[i]);
// 一位一位字节地添加到队列
buff.push_back(static_cast<int8_t>(frame.data[i]));
}
// printf("\n");
/* 解析数据 */
if (frame.can_id == 0x116 && frame.can_dlc == 8)
{
// printf("扩展帧 <0x%08x> ", frame.can_id & CAN_EFF_MASK);
// printf("%02x ", frame.can_dlc);
// printf("\n---------------------\n");
// printf("Receive状态值为:%02x \n", buff[0]);
// printf("Receive打角值L为:%02x \n", buff[2]);
// printf("Receive打角值H为:%02x \n", buff[3]);
// printf("Receive速度值L为:%02x \n", buff[4]);
// printf("Receive速度值H为:%02x \n", buff[5]);
// printf("Receive电量0x为:%02x \n", buff[6]);
std::vector<int16_t> Velocity_feedback(4, 0);
Velocity_feedback = hexToShort(buff);
// 获取完一帧的标志位,可以输出数据
geometry_msgs::Twist feedback_twist;
// 1 获取档位
int gear = static_cast<int>(Velocity_feedback[0]);
// 3 获取车速
// TODO ± 5m/s 0.001(m/s)/bit 有符号
double DM_Speed = static_cast<double>(Velocity_feedback[2]) / 185;
if (gear == 2)
DM_Speed = -DM_Speed;
feedback_twist.linear.x = DM_Speed;
// 2 获取舵机转向角度(打角值)
// TODO 524-1024-1524 0.1°/bit 0对应最左,1024对应中间角度
double Steer_Angle = (static_cast<double>(Velocity_feedback[1]) - 1024) / 3.6;
// 打角值满足:tan(打角值) = 前后轮轴距 / 转弯半径
// 角速度 = 线速度 / 转弯半径 = 线速度 * tan(打角值) / 前后轮轴距
double Velocity_Angle = DM_Speed * tan(fabs(M_PI * Steer_Angle / 180)) / wheel_base;
feedback_twist.angular.z = Velocity_Angle;
// 4 获取电池电量
int power = static_cast<double>(Velocity_feedback[3]);
if (power < 20)
ROS_WARN("Battery power (%d) is less than 10%!", power);
// std::cout << "Receive档位值为: " << gear << std::endl;
// std::cout << "Receive角速度值为: " << Velocity_Angle << std::endl;
// std::cout << "Receive速度值为: " << DM_Speed << std::endl;
// std::cout << "Receive电量为: " << power << std::endl;
// 5 发布速度
pub_.publish(feedback_twist);
// 6 发布里程计,左转是rZ正方向,而这个底盘最左是负,因此加-号
publishOdometry(DM_Speed, Velocity_Angle, -M_PI * Steer_Angle / 180);
}
}
}
// 2.1 解析数据
std::vector<int16_t> canControl::hexToShort(const std::vector<uint8_t> &hex_data)
{
std::vector<int16_t> short_data(4, 0);
// 1 获取档位
uint8_t byte = hex_data[0], mask = 0b00001100;
// 使用位与操作符&来获取第3-4位的值,将结果向右位移3位
uint8_t gear = (byte & mask) >> 3;
short_data[0] = static_cast<int16_t>(gear);
// 2 获取舵机转向角度
// 将两个连续的字节(低位hex_data[i] 和 高位hex_data[i+1])组合为一个 int16_t 类型的数值:千万注意高低顺序,仔细看通讯协议
// 高位hex_data[i+1]需要先强制转换为一个有符号的short类型的数据以后再移位
short Steer_Angle_H = static_cast<int16_t>(hex_data[3]);
// 左移运算符 << 将 high 的二进制表示向左移动 8 位。这样做是因为 int16_t 类型占用 2 个字节,而我们希望将 high 的数据放置在最高的 8 位上。
// |: 按位或运算符 | 将经过左移的 high 数据和 hex_data[i] 数据进行按位或操作,将它们组合为一个 16 位的数值
short_data[1] = static_cast<int16_t>((Steer_Angle_H << 8) | hex_data[2]);
// 3 获取车速
short DM_Speed_H = static_cast<int16_t>(hex_data[5]);
short_data[2] = static_cast<int16_t>((DM_Speed_H << 8) | hex_data[4]);
// 4 获取电池电量
short_data[3] = static_cast<int16_t>(hex_data[6]);
return short_data;
}
// 2.2 推算里程计并发布
void canControl::publishOdometry(double linear_velocity, double angular_velocity, double Steer_Angle)
{
// 计算与上一时刻的时间差
static double last_stamp = ros::Time::now().toSec();
double dt = ros::Time::now().toSec() - last_stamp;
last_stamp = ros::Time::now().toSec();
// 1 推算里程
double wz = angular_velocity, vx = 0.0, vy = 0.0;
// 计算偏航角(注意是相对于初始0,要绝对的需要IMU)
yaw += angular_velocity * dt;
// 根据线速度以及航向角计算X,Y方向上的位移
vx = linear_velocity * std::cos(Steer_Angle);
vy = linear_velocity * (linear_velocity < 0.0 ? sin(-Steer_Angle) : sin(Steer_Angle));
// 计算相对与上一时刻的位,根据偏航变换到初始坐标系
position_x_ += cos(yaw) * vx * dt - sin(yaw) * vy * dt;
position_y_ += sin(yaw) * vx * dt + cos(yaw) * vy * dt;
// 2 发布tf
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(yaw);
// std::cout<< "odom_quat:" << odom_quat<<std::endl;
geometry_msgs::TransformStamped tf_msg;
tf_msg.header.stamp = ros::Time::now();
tf_msg.header.frame_id = "odom";
tf_msg.child_frame_id = "base_link";
tf_msg.transform.translation.x = position_x_;
tf_msg.transform.translation.y = position_y_;
tf_msg.transform.translation.z = 0.0;
tf_msg.transform.rotation = odom_quat;
tf_broadcaster_.sendTransform(tf_msg);
// 3 发布odom
nav_msgs::Odometry odom_msg;
odom_msg.header.stamp = ros::Time::now();
odom_msg.header.frame_id = "odom";
odom_msg.child_frame_id = "base_link";
odom_msg.pose.pose.position.x = position_x_;
odom_msg.pose.pose.position.y = position_y_;
odom_msg.pose.pose.position.z = 0.0;
odom_msg.pose.pose.orientation = odom_quat;
odom_msg.twist.twist.linear.x = vx;
odom_msg.twist.twist.linear.y = vy;
odom_msg.twist.twist.angular.z = wz;
odom_msg.pose.covariance[0] = 0.1;
odom_msg.pose.covariance[7] = 0.1;
odom_msg.pose.covariance[14] = 0.1;
odom_msg.pose.covariance[21] = 1.0;
odom_msg.pose.covariance[28] = 1.0;
odom_msg.pose.covariance[35] = 1.0;
pub_Odom.publish(odom_msg);
}
// 3 析构函数
canControl::~canControl()
{
/* 关闭套接字 */
close(sockfd);
exit(EXIT_SUCCESS);
}
2.3 发送数据节点
can_send_node.cpp
#include "can_ros1_driver/can_send.hpp"
int main(int argc, char **argv)
{
ros::init(argc, argv, "can_send_node");
canControl can_control;
ros::spin();
return 0;
}
can_send.hpp
#ifndef CAN_H_
#define CAN_H_
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <net/if.h>
#include <iostream>
#include <string>
#include <cmath>
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "geometry_msgs/Twist.h"
#include "geometry_msgs/TwistStamped.h"
#include "nav_msgs/Odometry.h"
class canControl
{
public:
// 0 初始化
canControl();
// 1 下发CAN消息 速度控制节点消息的回调函数
void velocityCallback(const geometry_msgs::Twist::ConstPtr &msg);
void velocityCallback_Autoware(const geometry_msgs::TwistStamped::ConstPtr &msg);
// 1.1 向底盘发送控制指令
void publishCmd(float linear_vel, float angular_vel);
// 2 析构函数
~canControl();
private:
ros::NodeHandle nh_;
// 是否为Autoware速度
bool Autoware;
// 接收的速度话题
std::string twistTopic;
// 轴距
double wheel_base;
// 套接字参数
struct ifreq ifr;
struct sockaddr_can can_addr;
int sockfd;
int ret;
// 发送的数据
struct can_frame frameE2;
struct can_frame frame469;
// 当前里程计
double position_x_;
double position_y_;
double yaw;
// 订阅速度控制
ros::Subscriber sub_;
};
#endif // CAN_H_
can_send.cpp
#include "can_ros1_driver/can_send.hpp"
// 0 初始化
canControl::canControl() : nh_("~")
{
// 1 初始化ROS节点
nh_.param<double>("wheel_base", wheel_base, 1.0);
nh_.param<bool>("Autoware", Autoware, 1.0);
nh_.param<std::string>("twistTopic", twistTopic, "/cmd_vel");
position_x_ = 0.0;
position_y_ = 0.0;
yaw = 0.0;
/* 打开套接字 */
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (0 > sockfd)
{
perror("socket error");
exit(EXIT_FAILURE);
}
/* 指定can0设备 */
ifr = {0};
can_addr = {0};
strcpy(ifr.ifr_name, "can0");
ioctl(sockfd, SIOCGIFINDEX, &ifr);
can_addr.can_family = AF_CAN;
can_addr.can_ifindex = ifr.ifr_ifindex;
/* 将can0与套接字进行绑定 */
if (0 > bind(sockfd, (struct sockaddr *)&can_addr, sizeof(can_addr)))
{
perror("bind error");
close(sockfd);
exit(EXIT_FAILURE);
}
/* 设置过滤规则 */
setsockopt(sockfd, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
/* 发送数据格式 */
frameE2.can_dlc = 8; // 一次发送8个字节数据
frameE2.can_id = 0x0E2; // 帧ID为0x0E2,标准帧
frameE2.data[4] = 0x00;
frameE2.data[5] = 0x00;
frameE2.data[6] = 0x00;
frame469.can_dlc = 8; // 一次发送8个字节数据
frame469.can_id = 0x469; // 帧ID为0x469,标准帧
frame469.data[0] = 0x20;
frame469.data[1] = 0x00;
frame469.data[2] = 0x00;
frame469.data[5] = 0x00;
frame469.data[6] = 0x00;
// 创建订阅控制底盘消息的订阅者
if (Autoware)
sub_ = nh_.subscribe(twistTopic, 1000, &canControl::velocityCallback_Autoware, this);
else
sub_ = nh_.subscribe(twistTopic, 1000, &canControl::velocityCallback, this);
}
// 1 下发CAN消息 根据接收到的速度消息生成控制指令并发送
// 其他节点消息的回调函数
void canControl::velocityCallback(const geometry_msgs::Twist::ConstPtr &msg)
{
publishCmd(msg->linear.x, msg->angular.z);
}
// Autoware发送的
void canControl::velocityCallback_Autoware(const geometry_msgs::TwistStamped::ConstPtr &msg)
{
publishCmd(msg->twist.linear.x, msg->twist.angular.z);
}
// 1.1 向底盘发送控制指令
void canControl::publishCmd(float linear_vel, float angular_vel)
{
// 根据线速度和角速度生成控制指令的逻辑,将 linear_vel、angular_vel 转换为控制指令
// 1. 计算挡位Gear
int gear = 0; // 默认值
if (linear_vel > 0)
{
gear = 1; // 前进挡
}
else if (linear_vel < 0)
{
gear = 2; // 倒挡
}
// 2. 线控驾驶标志位,通过CAN线控
int line_control = 1;
// 3. 驻车P标志位
int parking_brake = 0;
// 速度为0或速度反向的时候刹车
static int last_gear = 0;
if (linear_vel == 0.0 || last_gear + gear == 3)
parking_brake = 1;
last_gear = gear;
// 4. 循环计数,默认为0
int loop_count = 0;
uint8_t gear_contrl = static_cast<uint8_t>(loop_count + parking_brake * 8 + line_control * 4 + gear);
// 5 计算速度byte
if (linear_vel > 5)
{
ROS_WARN("Speed is too fast!");
linear_vel = 5;
}
// TODO 1000有待优化
// printf("Send档位值为:%02x \n", gear_contrl);
// std::cout << "Send速度值为: " << linear_vel << std::endl;
uint8_t Speed_L = static_cast<uint8_t>((int)fabs(linear_vel) * 1000 % 256);
uint8_t Speed_H = static_cast<uint8_t>((int)fabs(linear_vel) * 1000 / 256);
// 6. 计算低压电器开关和速度校验和
int brakeLight = 0;
if (parking_brake)
brakeLight = 1;
int headlight = 0;
int trafficIndicatorL = 0;
int trafficIndicatorR = 0;
if (angular_vel > 0)
trafficIndicatorL = 1;
else if (angular_vel < 0)
trafficIndicatorR = 1;
uint8_t LowVoltageEle = static_cast<uint8_t>(brakeLight + headlight * 2 + trafficIndicatorL * 4 + trafficIndicatorR * 8);
uint8_t checksumSpeed = gear_contrl + Speed_L + Speed_H + LowVoltageEle;
/* 发送数据 进入线控 协议需要每次先要发速度清空 */
frameE2.data[0] = gear_contrl;
frameE2.data[1] = 0x00;
frameE2.data[2] = 0x00;
frameE2.data[3] = LowVoltageEle;
frameE2.data[7] = checksumSpeed;
ret = write(sockfd, &frameE2, sizeof(frameE2)); // 发送数据
// 7. 生成速度控制指令 发送数据
frameE2.data[0] = gear_contrl;
frameE2.data[1] = Speed_L;
frameE2.data[2] = Speed_H;
frameE2.data[3] = LowVoltageEle;
frameE2.data[7] = checksumSpeed;
ret = write(sockfd, &frameE2, sizeof(frameE2)); // 发送数据
// 8. 计算角度byte
// 转弯的角度 = arctan(( 角速度 / 线速度 ) * 轴距 )
// 左转是rZ正方向,而这个底盘最左是负,因此加-号
// TODO
double angular = -atan((angular_vel / fabs(linear_vel)) * wheel_base);
int angular_byte = 3.6 * angular * 180 / M_PI + 1024;
// std::cout << "Send打角值为: " << angular_byte << std::endl;
uint8_t angular_L = static_cast<uint8_t>((int)angular_byte % 256);
uint8_t angular_H = static_cast<uint8_t>((int)angular_byte / 256);
// 9. 计算角度校验和
uint8_t checksumAng = 0x20 + angular_H + angular_L;
// 10. 生成角度控制指令 发送数据
frame469.data[3] = angular_H;
frame469.data[4] = angular_L;
frame469.data[7] = checksumSpeed;
ret = write(sockfd, &frame469, sizeof(frame469)); // 发送数据
}
// 2 析构函数
canControl::~canControl()
{
/* 发送数据 退出线控 */
for (int i = 0; i < 8; i++)
frameE2.data[i] = 0x00;
ret = write(sockfd, &frameE2, sizeof(frameE2)); // 发送数据
/* 关闭套接字 */
close(sockfd);
exit(EXIT_SUCCESS);
}
2.4 功能包配置
can_control.launch
<launch>
<node name="can_receive_node" pkg="can_ros1_driver" type="can_receive_node" output="screen">
<!-- 小车轴距 -->
<param name="wheel_base" value="0.35"/>
</node>
<node name="can_send_node" pkg="can_ros1_driver" type="can_send_node" output="screen">
<!-- 小车轴距 -->
<param name="wheel_base" value="0.35"/>
<!-- 是否为Autoware速度 -->
<param name="Autoware" value="false"/>
<!-- 接收的速度话题 -->
<param name="twistTopic" value="/turtle1/cmd_vel"/>
</node>
</launch>
cmakeLists
cmake_minimum_required(VERSION 3.0.2)
project(can_ros1_driver)
add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
roscpp
tf
std_msgs
nav_msgs
geometry_msgs
)
catkin_package( CATKIN_DEPENDS roscpp tf std_msgs nav_msgs geometry_msgs)
include_directories(
include
${catkin_INCLUDE_DIRS})
add_executable(can_receive_node src/can_receive.cpp src/can_receive_node.cpp)
# ROS相关库
target_link_libraries(can_receive_node ${catkin_LIBRARIES})
add_executable(can_send_node src/can_send.cpp src/can_send_node.cpp)
target_link_libraries(can_send_node ${catkin_LIBRARIES})
package.xml
<?xml version="1.0"?>
<package format="2">
<name>can_ros1_driver</name>
<version>0.0.0</version>
<description>The can_ros1_driver package</description>
<maintainer email="WangBin@todo.todo">WangBin</maintainer>
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<depend>roscpp</depend>
<depend>tf</depend>
<depend>std_msgs</depend>
<depend>nav_msgs</depend>
<depend>geometry_msgs</depend>
</package>
三、ROS2驱动程序
TODO
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【网络协议】LACP(Link Aggregation Control Protocol,链路聚合控制协议)
- c语言成长日记(1)
- 【每日一题】删除子串后的字符串最小长度
- 系统账号注册
- 云原生Kubernetes系列 | Kubernetes Secret及ConfigMap
- Vue3+Ts+Element Plus 创建项目模板
- cfa备考必读攻略:cfa一级固定收益如何复习
- ceph之rados设计原理与实现第六章:移动的对象载体——PG
- 【算法题】3. 无重复字符的最长子串
- [数据结构]链栈的创建,入栈和出栈