实验笔记之——基于TUM-RGBD数据集的SplaTAM测试
之前博客对SplaTAM进行了配置,并对其源码进行解读。
学习笔记之——3D Gaussian SLAM,SplaTAM配置(Linux)与源码解读-CSDN博客SplaTAM全称是《SplaTAM: Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM》,是第一个(也是目前唯一一个)开源的用3D Gaussian Splatting(3DGS)来做SLAM的工作。在下面博客中,已经对3DGS进行了调研与学习。其中也包含了SplaTAM算法的基本介绍。学习笔记之——3D Gaussian Splatting及其在SLAM与自动驾驶上的应用调研-CSDN博客。https://blog.csdn.net/gwplovekimi/article/details/135647242?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22135647242%22%2C%22source%22%3A%22gwplovekimi%22%7D在原博客中也对TUM-RGBD数据集的freiburg1_desk_seed0进行了测试,感觉效果一般般,为此本博文打算对下载的TUM几个序列都进行测试看看效果。
本博文为本人实验测试SplaTAM过程的实验记录,本博文仅供本人实验记录用~
目录
rgbd_dataset_freiburg3_long_office_household
运行过程
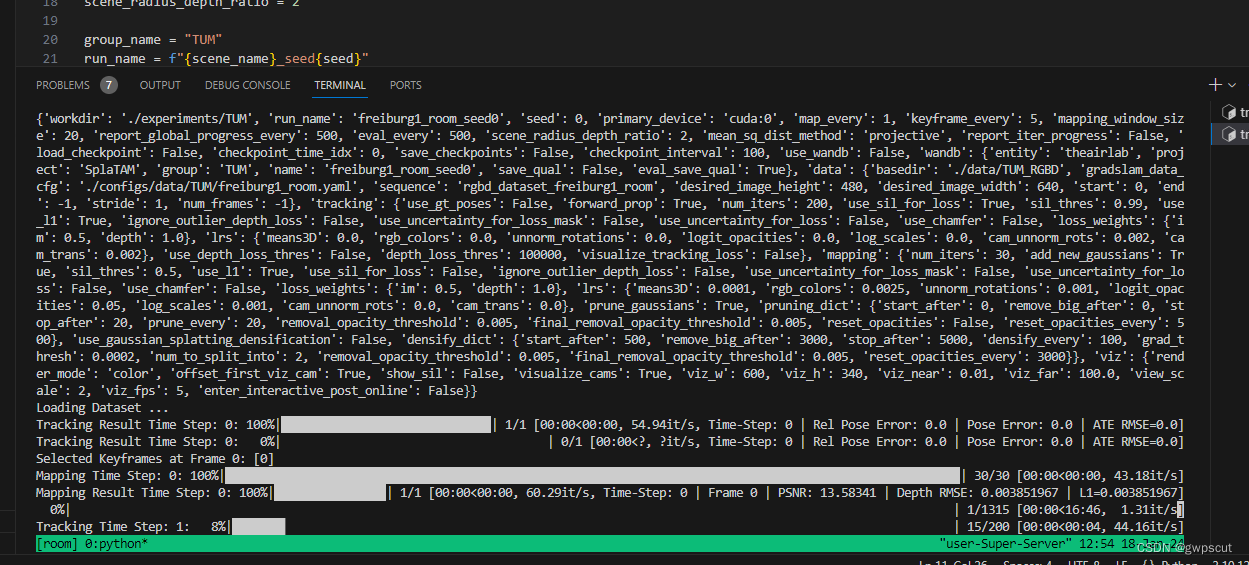
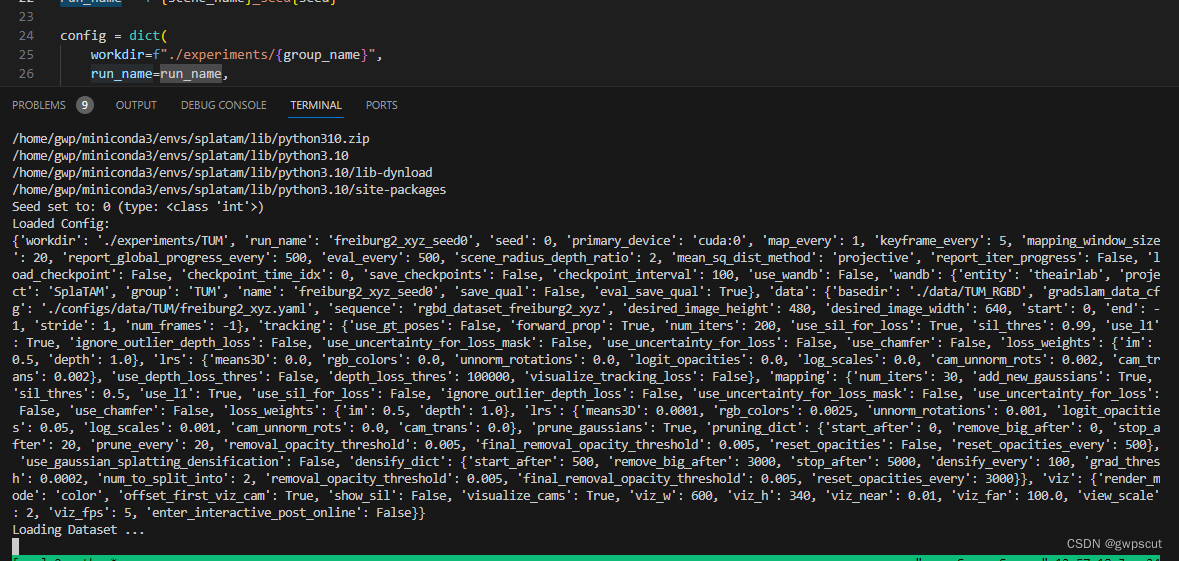
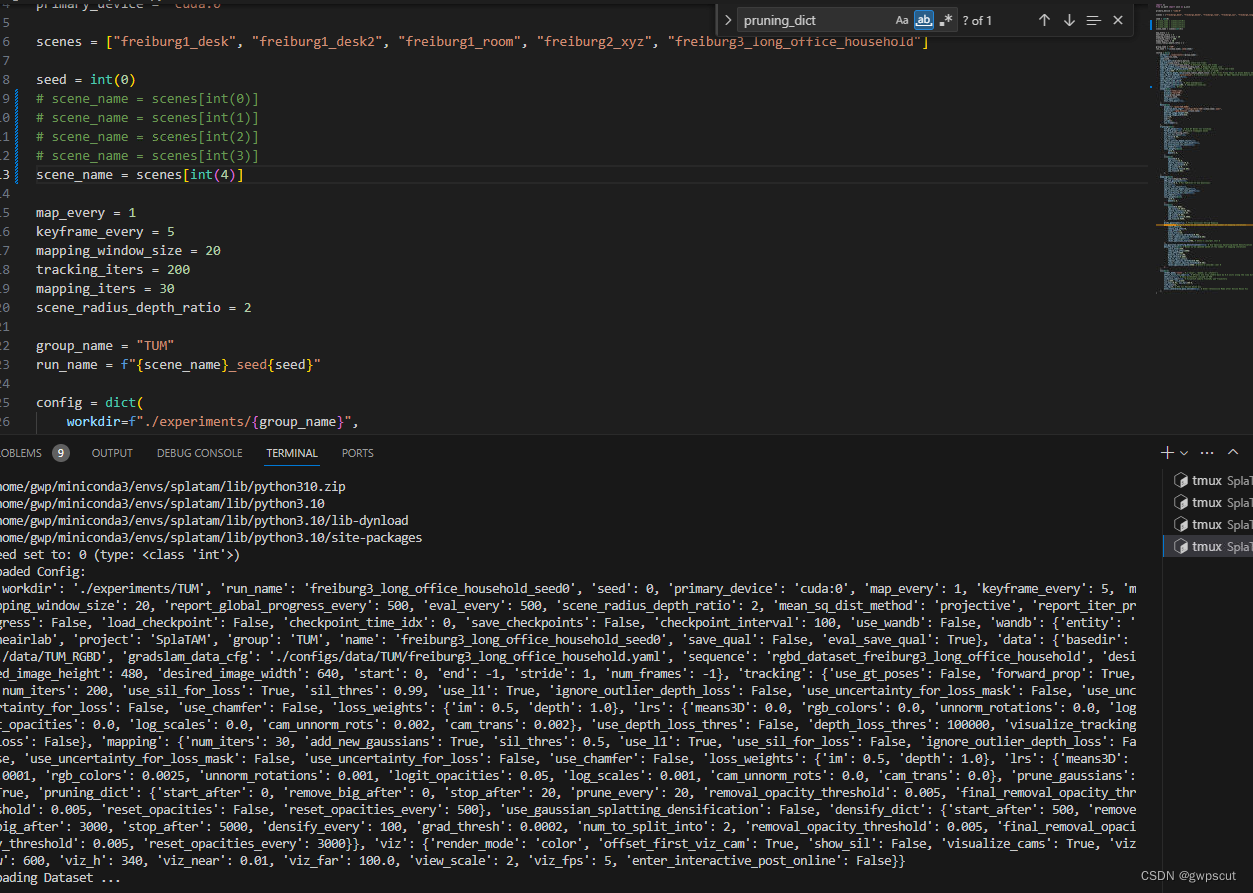
注意:要修改configs/tum/splatam.py中的scene_name来决定训练哪个序列
(之前的desk训练时间大概30分钟左右,还是打开一下tmux吧)
tmux new -s desk2
tmux new -s room
tmux new -s xyz
tmux new -s household
(开启运行的环境)
conda activate splatam
(开始测试运行)
python scripts/splatam.py configs/tum/splatam.py运行后,可以看到experiments文件如下:

忘记指定GPU了,都挤到一块板子上跑了

等待一段时间,下面看看再各个序列的测试效果
要训练完才可以可视化建图与定位的效果(注意跟训练一样要修改对应的config文件来选用序列,seed统一都为0)
(最终的建图效果)
python viz_scripts/final_recon.py configs/tum/splatam.py
(训练过程的可视化)
python viz_scripts/online_recon.py configs/tum/splatam.pyrgbd_dataset_freiburg1_desk
SplaTAM Testing using TUM-Dataset freiburg1
SplaTAM Testing using TUM-Dataset freiburg1
训练完结果如下:PSNR只有21.49算是比较差的吧,当然deth恢复的精度是3.38cm以及定位精度是3.34(论文里面是3.35)这个结果还是不错的。细看论文会发现,论文里面对于TUM数据集好像只用来验证定位精度,而mapping性能都是采用Replica与ScanNet++。目前不打算花太多时间去逐一验证了,有小伙伴验证了的话可以给个评论看看是否如论文的效果,因为在tum数据集上,个人感觉mapping效果一般般~

rgbd_dataset_freiburg1_desk2

rgbd_dataset_freiburg1_room
rgbd_dataset_freiburg2_xyz
rgbd_dataset_freiburg3_long_office_household
总结与分析
后面有时间再试试用手机实测来看看吧,不过目前看来用数据集测试的效果都比较差,实时性也很一般,比如rgbd_dataset_freiburg1_desk序列都训练30多分钟了,PSNR还只有21左右,应该3DGS性能不至于这样,可能是因为一些参数的设置包括剪枝等等的操作吧~感觉还是有比较大可以研究的空间~
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 浏览器原生支持JS Base64编码解码
- PanGu,常用各类型的公共模块-微组件
- HarmonyOS 整体容器组件(Navigation)
- C++-类和对象(2)
- IPv6技术 DHCPv6原理与配置
- Java多线程技术9——非阻塞队列(备份)
- 对多个资源、数据库表、对象同时加锁时,需要保持一致的加锁顺序,否则可能会造 成死锁。
- P114 增强学习 RL ---没懂,以后再补充
- 图书馆综合管理系统(JSP+java+springmvc+mysql+MyBatis)
- C语言从入门到实战——结构体与位段