ABB机器人通过robotstudio进行系统备份操作的具体方法和步骤
发布时间:2024年01月17日
ABB机器人通过robotstudio进行系统备份操作的具体方法和步骤

如下图所示,用标准的网线,一端连接到机器人控制柜的网口,一端连接到电脑(如果机器人控制柜的柜门是打开的,也可以直接连接到X2网口(标注了service的那个网口),

如下图所示,在网络和Internet中找到自己当前使用的网卡,设置该网卡适配器的Ipv4属性为自动获得IP地址,然后点击确定,

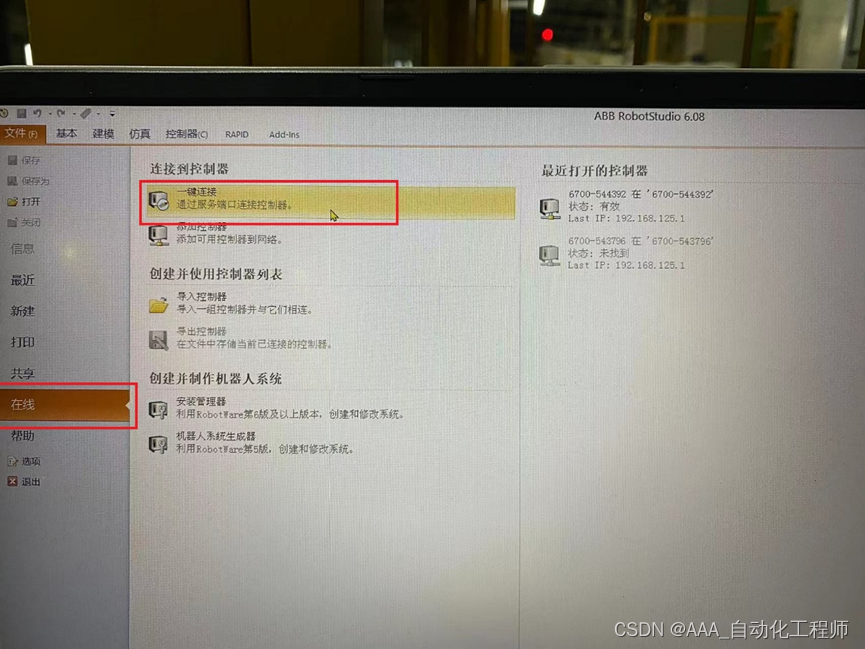
如下图所示,打开robotstudio(我这里的版本是6.08),然后点击在线—一键连接,
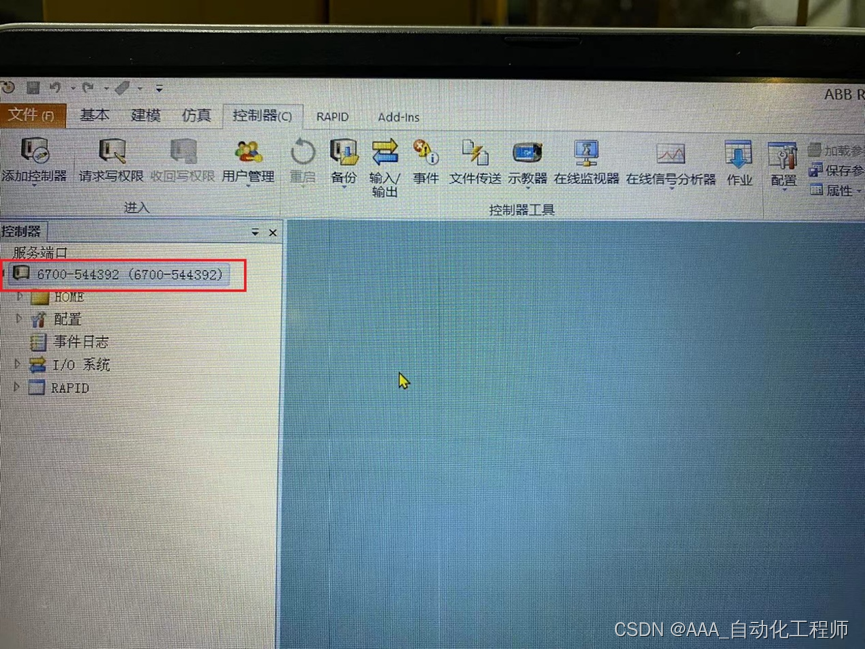
如下图所示,连接成功后,robotstudio会显示当前机器人系统的名称(这里为6700-544392),
文章来源:https://blog.csdn.net/duxiaokang2014/article/details/135640777
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【Python编程工具】【ssh连接Docker容器】如何使用Docker容器里的python环境,如何调试在容器中的代码
- DIY电脑装机机箱风扇安装方法
- 前端开发 3: JavaScript
- 【AI】AI和点云(1/2)
- 解析大语言模型LLM的幻觉问题:消除错觉、提高认知
- nginx反向代理websocket 60秒自动断开处理
- 【AI】目标检测算法DETR源码解析及推理测试
- EI级 |VMD-TCN-GRU变分模态分解结合时间卷积门控循环单元多变量光伏功率时间序列预测 Matlab实现
- 认识数据的规范化
- SpringBoot ElasticSearch 聚合排序