urdf文件<gazebo>内<plugin>标签作用(虚拟驱动)
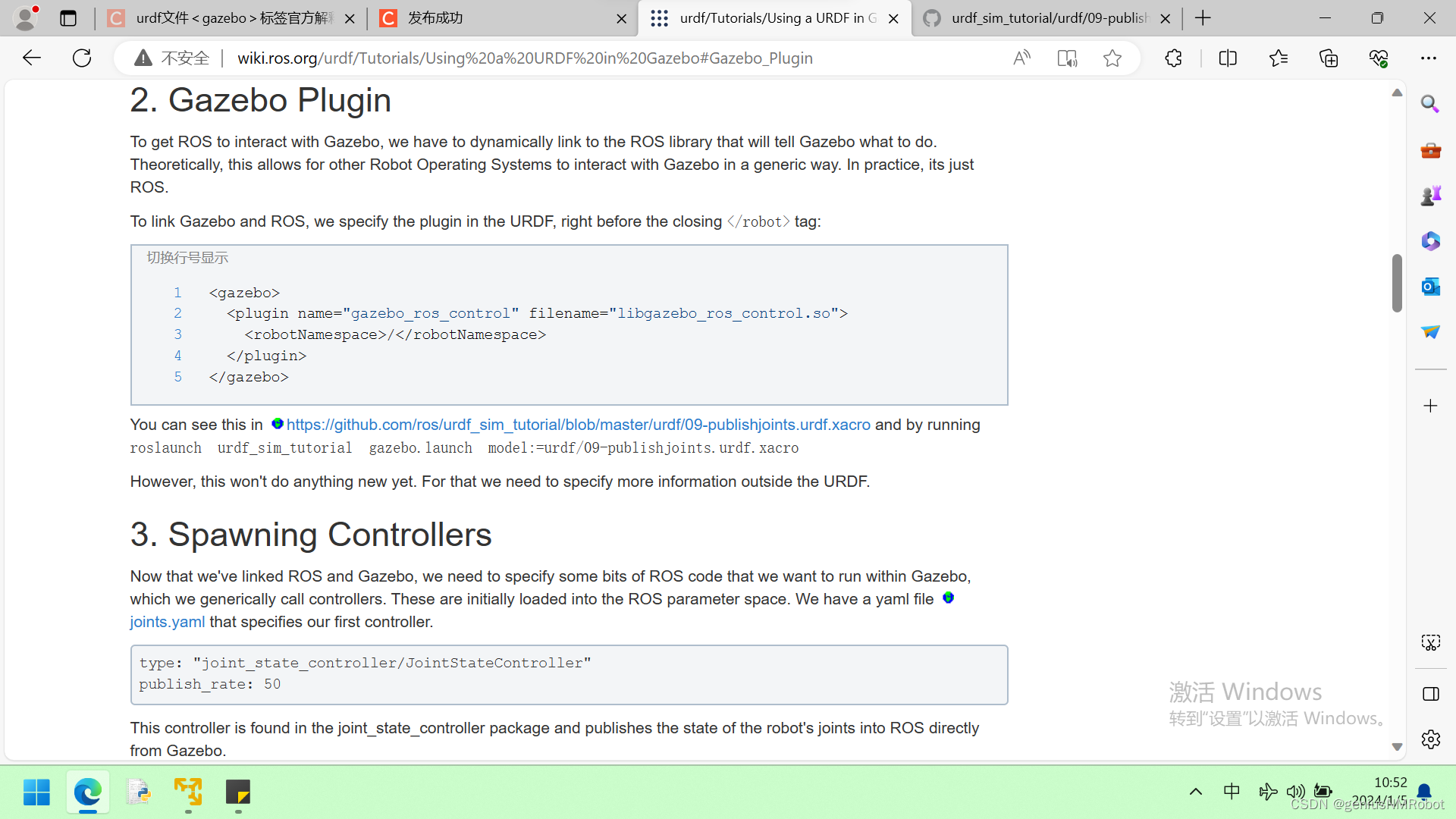
To get ROS to interact with Gazebo, we have to dynamically link to the ROS library that will tell Gazebo what to do. Theoretically, this allows for other Robot Operating Systems to interact with Gazebo in a generic way. In practice, its just ROS.
如果要使用gazebo模拟,那么需要gazebo联系到ros2软件,我们需要一个东西来告诉gazebo该做什么,plugin就是指定这个规则的一个东西
To link Gazebo and ROS, we specify the plugin in the URDF, right before the closing?</robot>?tag:
? 1 <gazebo>
? 2 <plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
? 3 <robotNamespace>/</robotNamespace>
? 4 </plugin>
? 5 </gazebo>
这个是ros1的资料来源,但是同样可以有一些用途
?应该就是一个驱动,plugin就是一个虚拟的驱动,如果你要模拟摄像头,需要指定摄像头的驱动,用plugin来指定。
<gazebo>
? ? ? ? <plugin name="摄像头100" filename="虚拟摄像头驱动文件名称">
? ? ? ? ? ? ? ? <robotNamespace>/</robotNamespace>
? ? ? ? </plugin>
</gazebo>
如果你要在gazebo模拟激光雷达,需要安装激光雷达驱动,在gazebo里面就只要安装虚拟的雷达驱动就可以了,也只要使用plugin来指定就可以了
<gazebo>
? ? ? ? <plugin name="雷达100" filename="虚拟雷达驱动文件名称">
? ? ? ? ? ? ? ? <robotNamespace>/</robotNamespace>
? ? ? ? </plugin>
</gazebo>
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 通过232转Profinet将霍尼韦尔扫码枪连接到PLC上
- 线性表之队列API设计思路
- js find方法的使用
- Linux服务器搭建项目环境(云服务器和自己的本地Linux服务器都适用)
- 编程笔记 html5&css&js 033 HTML SVG
- sfml使用opengl着色器实现2d水面波浪
- 【计算机组成原理】总复习笔记(上)
- 基于Python的图书借阅归还管控系统
- toluaframework中C#怎么调用Lua的方法以及无GC方法
- 华为gre隧道全部跑静态路由