Halcon3D篇-3D预处理,滤波,点云筛选
发布时间:2024年01月09日
前言
由于3D相机采集到的数据通常通过Tiff格式的深度图进行显示或者保存。
深度图与模型的互转可以访问另一篇博客:https://blog.csdn.net/m0_51559565/article/details/135362674
关于3D相机的数据采集,可以访问我们另一篇关于LMI3D相机SDK的二次开发:
https://blog.csdn.net/m0_51559565/article/details/134404394
一:处理流程
常见的3D数据通常以Z轴作为灰度值的深度图的形式出现。所以我们可以根据2D图的特性,对2D图先进行灰度二值化筛选,图像增强,滤波等方式提取特征点。转换为3D模型后可以通过对点云的欧式距离进行点云集的拆分。
二:灰度筛选与滤波
*读取图像
read_image (Image, 'E:/UpperComputer/3D检测/点云筛选和滤波/XYZ彩色融合图.tiff')
*拆分3通道,对Z通道进行单独处理
decompose3 (Image, x, y, z)
*通过选取灰度值,直接找到所需的区域
threshold (z, Regions, 114.83, 145.83)
*将区域进行裁剪
reduce_domain (z, Regions, ImageReduced)
crop_domain (ImageReduced, ImagePart)
*通过ROI的形式剔除边缘不适合的点云
gen_rectangle1 (ROI_0, 145.41, 81.8859, 509.72, 397.831)
reduce_domain (ImagePart, ROI_0, ImageReduced1)
crop_domain (ImageReduced1, ImagePart1)
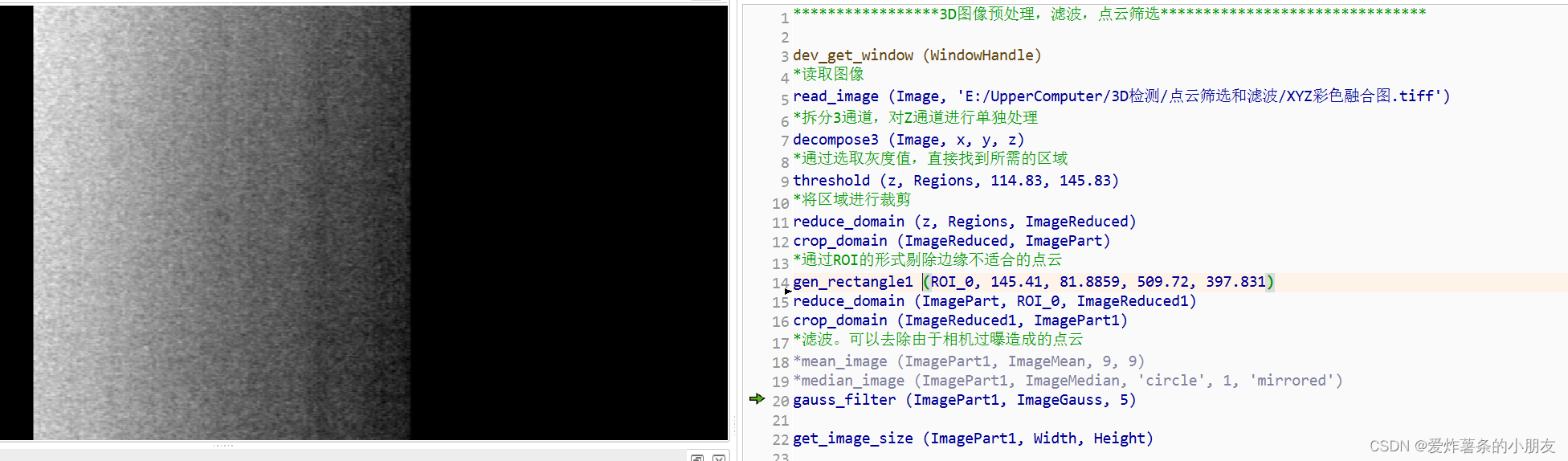
*滤波。可以去除由于相机过曝造成的点云
*mean_image (ImagePart1, ImageMean, 9, 9)
*median_image (ImagePart1, ImageMedian, 'circle', 1, 'mirrored')
gauss_filter (ImagePart1, ImageGauss, 5)
原始图像
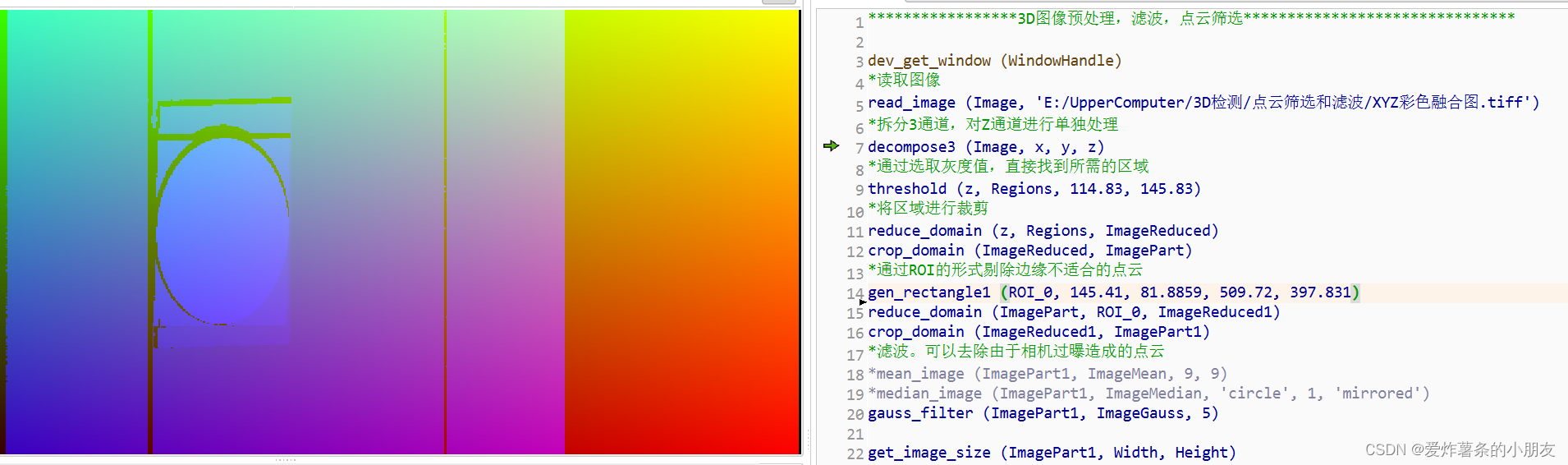
灰度二值化处理,与ROI拆分。在实际处理中,为了可以快速的完成对特征区域的匹配,通过会直接通过ROI的形式,当然不局限于还有,例如模板匹配,圆形测量等常用的2D图像提取方法。
三:点云筛选
在进行完预处理后,通常点云的去噪效果非常好,或者几何完成的情况。但是对于部分特殊情况。例如,由于相机过曝或者强反光的金属表面造成的点云波动,通常这类型的波动情况往往点云数少,高度差距小,所以比较难发现。
通常可以直接使用点云欧式距离。例如下面,对点云欧式距离大于5的点云进行区分(点云间的距离等于5个点的距离)。然后根据我们需要的点云数进行筛选即可
connection_object_model_3d (ObjectModel3D, 'distance_3d', 5, ObjectModel3DConnected)
select_object_model_3d (ObjectModel3DConnected, 'num_points', 'and', 100, 1000000000, ObjectModel3DSelected)
结尾
通常情况下说,灰度二值化将要测量的平面选取出来,然后进行均值滤波,让平面变得光滑,去除噪点,在通过选取ROI去除边缘点云采样不理想的区域。基本可以完成对点云的预处理了。最后根据点云间的距离,还可以进一步的去除噪点。到最后基本就可以完成对点云的处理,方式适用于大部分3D检测和缺陷检测的项目。但是对倾斜面无需抓取项目仍有待考究
文章来源:https://blog.csdn.net/m0_51559565/article/details/135366860
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 《WebKit 技术内幕》之七(4): 渲染基础
- 性能测试之脚本、工具、结果分析总结
- c# 中的点的作用
- 宠物房市场分析:到 2025 年市场规模将达到 26 亿元
- 6.2 声音编辑工具GoldWave5简介(8)
- springboot整合mongodb批量修改和添加索引
- Laravel中的lockForUpdate悲观锁
- 跨平台的第三方网易云播放器Radishes
- CMAKE入门笔记
- 让运维人员彻底搞懂的Nginx 跨域 有详细的实验步骤