项目实战:自动驾驶之方向盘操纵
项目介绍
根据汽车前方摄像头捕捉的画面,控制汽车方向盘转动的方向和角度,这是自动驾驶要解决的核心问题。这个项目主要是通过使用深度神经网络解决一个回归问题。不同于分类、识别场景,回归问题中神经网络输出的是一个连续的值。
通过这个项目的学习,可以将神经网络用于通过人脸判断年龄,美颜指数等领域。在这个项目里,还可以学到图像增强的技术,用于提高网络的性能。
思维导图
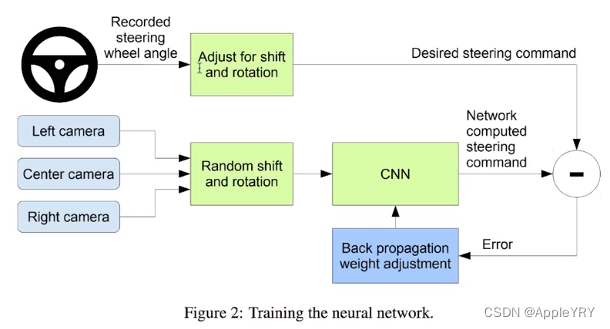
深度学习本身最重要的是数据,在汽车的方向盘那边接了类似于USB那样的东西,通过这个设备能读到方向盘转的角度是多少?
同时,在车上装了三个摄像头,分别放在车的左边,中间,右边。然后将这三个摄像头数据作为卷积神经网络的输入,CNN会有一个输出,(这个输出,根据输入的情况会反馈出方向和角度),将这个误差反馈回去,不断的训练这个网络。
训练好网络后,我们只需要一个摄像头,安在车中间的摄像头,作为输入。
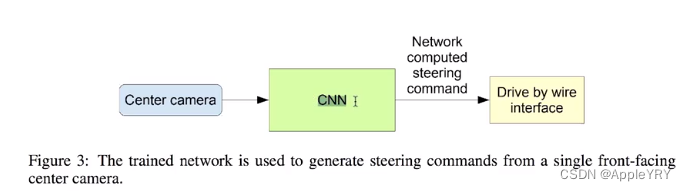
CNN的输出,经过方向盘的接口,传递给方向盘(方向盘按照传输的数值进行转动方向盘),进行自动驾驶的操作。
网络结构详解:
输入是一个66x200的彩色图像(3@66200);
图像处理,将像素从0~255进行归一化(0到1之间,或者-1到1之间,-0.5-0.5之间),将数据变成容易被网络训练的数据;
然后通过**三层55的神经网络**,每一层输出是24,36,48个通道,即24@3198,36@1427,48@522;
然后,再次通过两个33的神经网络,即64@320,64@118。
接下来通过Flatten操作,将神经网络输出的图,变成一维向量,再经过4个全连接层,即(1164,110,50,10),
最后的输出层是一个神经元(回归模型),最后一个神经网络是一个向量表示(左用-,右用+,再加上一个标量。)
以后再工作中遇到的问题,可以找一篇论文具体分析以下原理。
重点
自动驾驶之方向盘角度预测
学习目标
根据车载摄像
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 代码随想录刷题第十天
- IntelliJ IDE 插件开发 | (四)开发一个时间管理大师插件
- Vue2 - 延迟加载(requestAnimationFrame实现)+ 效果展示
- Windows系统下安装MobaXterm23.6终端工具软件
- 【软件测试】模拟练习题
- 助力打造清洁环境,基于轻量级YOLOv8开发构建公共场景下垃圾堆放垃圾桶溢出检测识别系统
- springboot(ssm仓库管理系统 wms智能仓储管理系统Java系统
- 篮球羽毛球乒乓球体育场馆预订小程序开发
- Windows: office: MS word: 吐槽:怎么分割一个word文档
- 【粉丝福利社】边缘计算系统设计与实践(文末送书-进行中)