ROS 传感器—相机的使用
发布时间:2024年01月03日
在ROS中,相机作为一种重要的传感器设备被广泛应用于机器人视觉、导航定位、目标检测与识别等多种场景。
ROS提供了一系列工具和接口来支持不同类型的相机,包括USB摄像头、GigE Vision相机、FireWire相机以及深度相机(如Kinect或Intel RealSense系列)等。
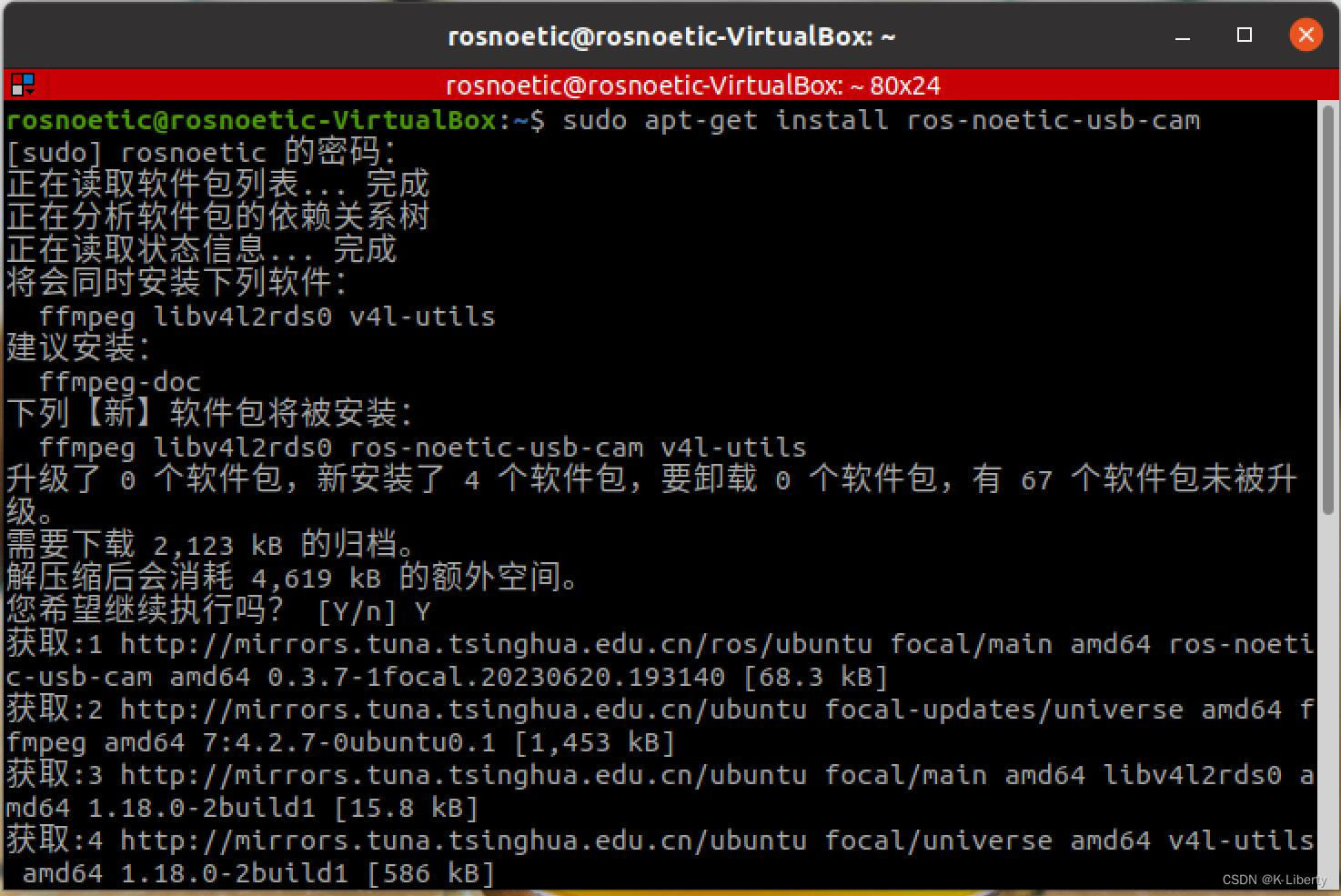
对于标准的USB相机,可以使用usb_cam或者camera_driver等ROS包来获取图像数据。
对于特定型号的相机,例如Kinect v1/v2或者RealSense系列相机,有专门的ROS驱动包如libfreenect、libfreenect2、realsense-ros等。
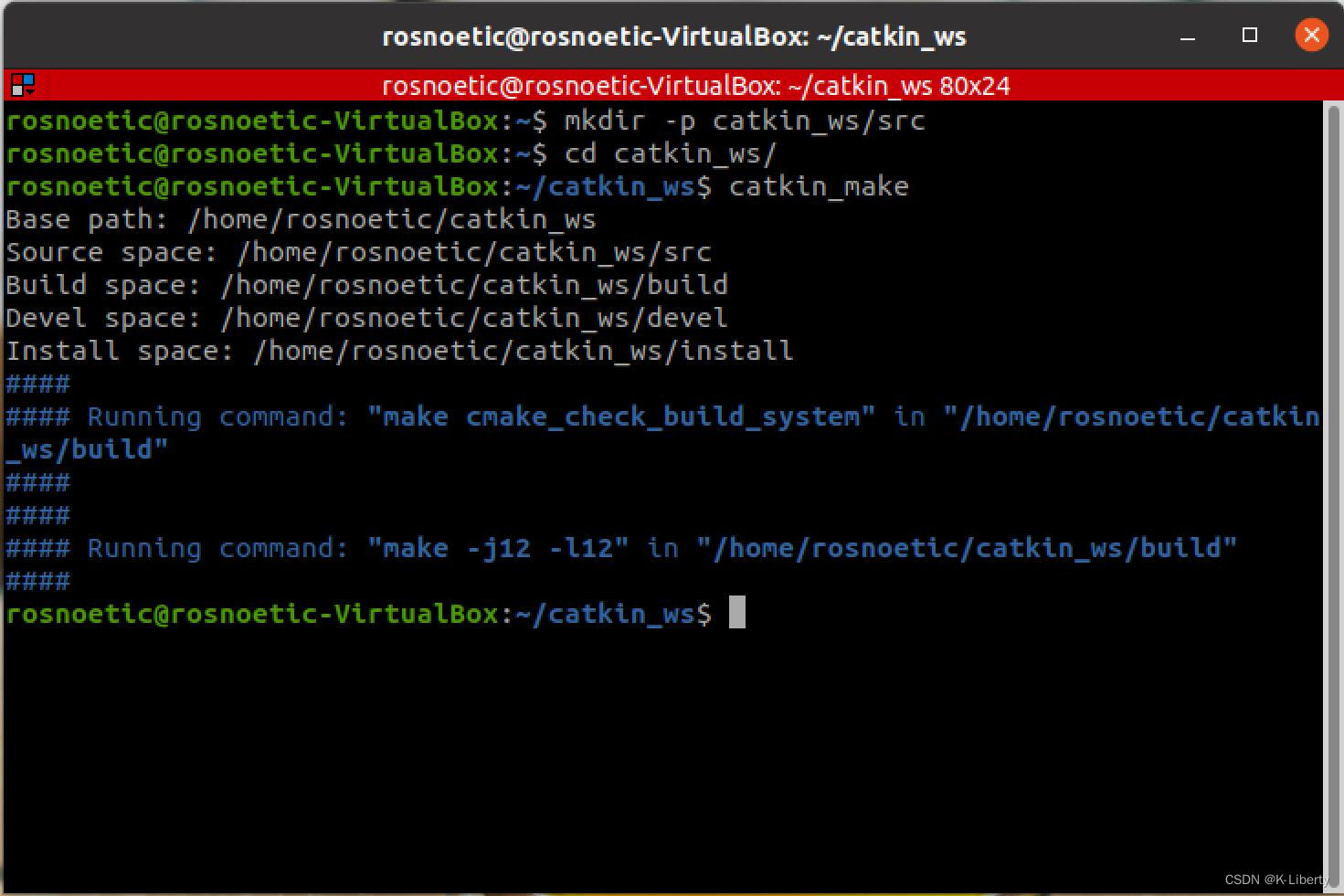
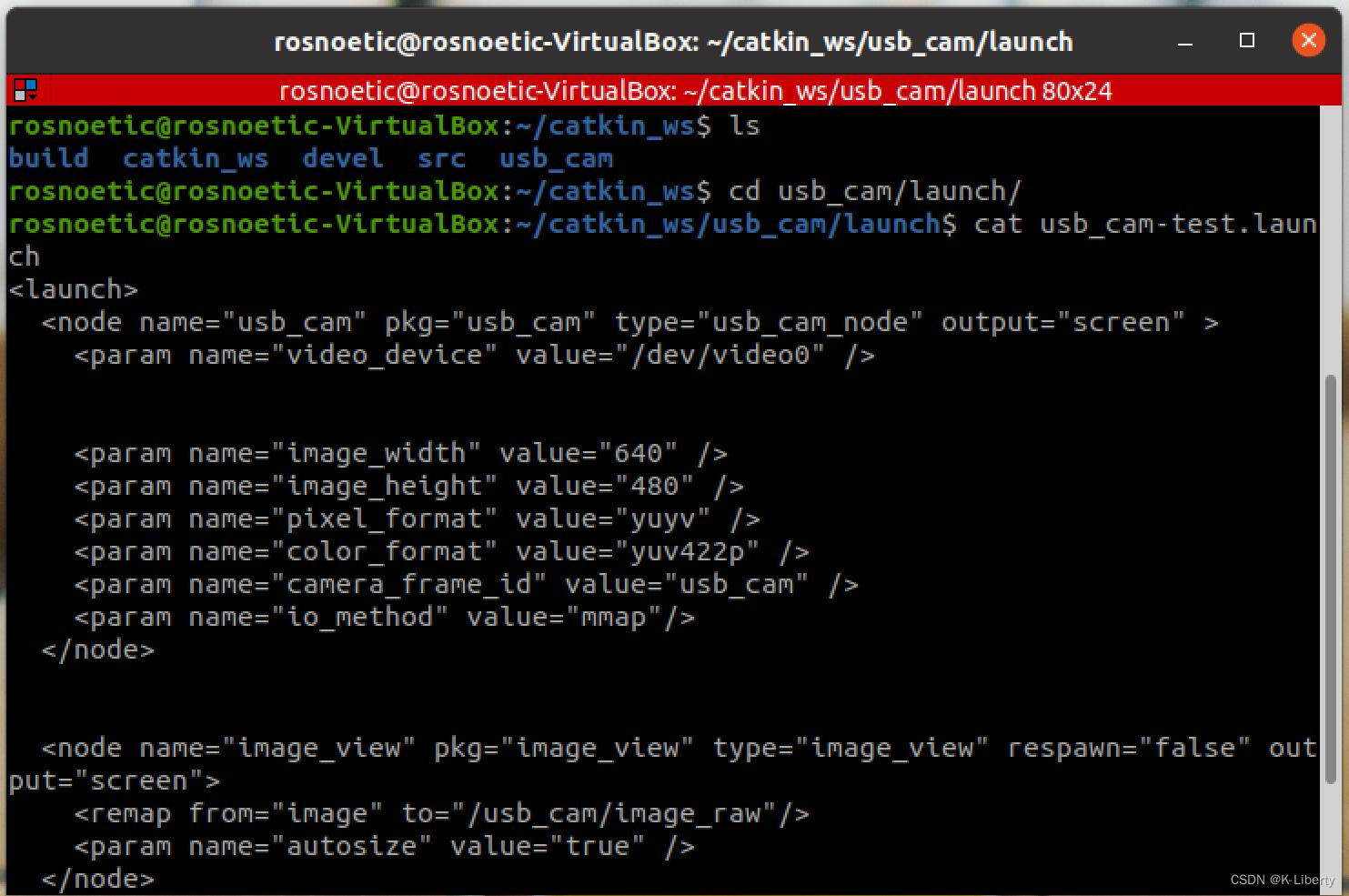
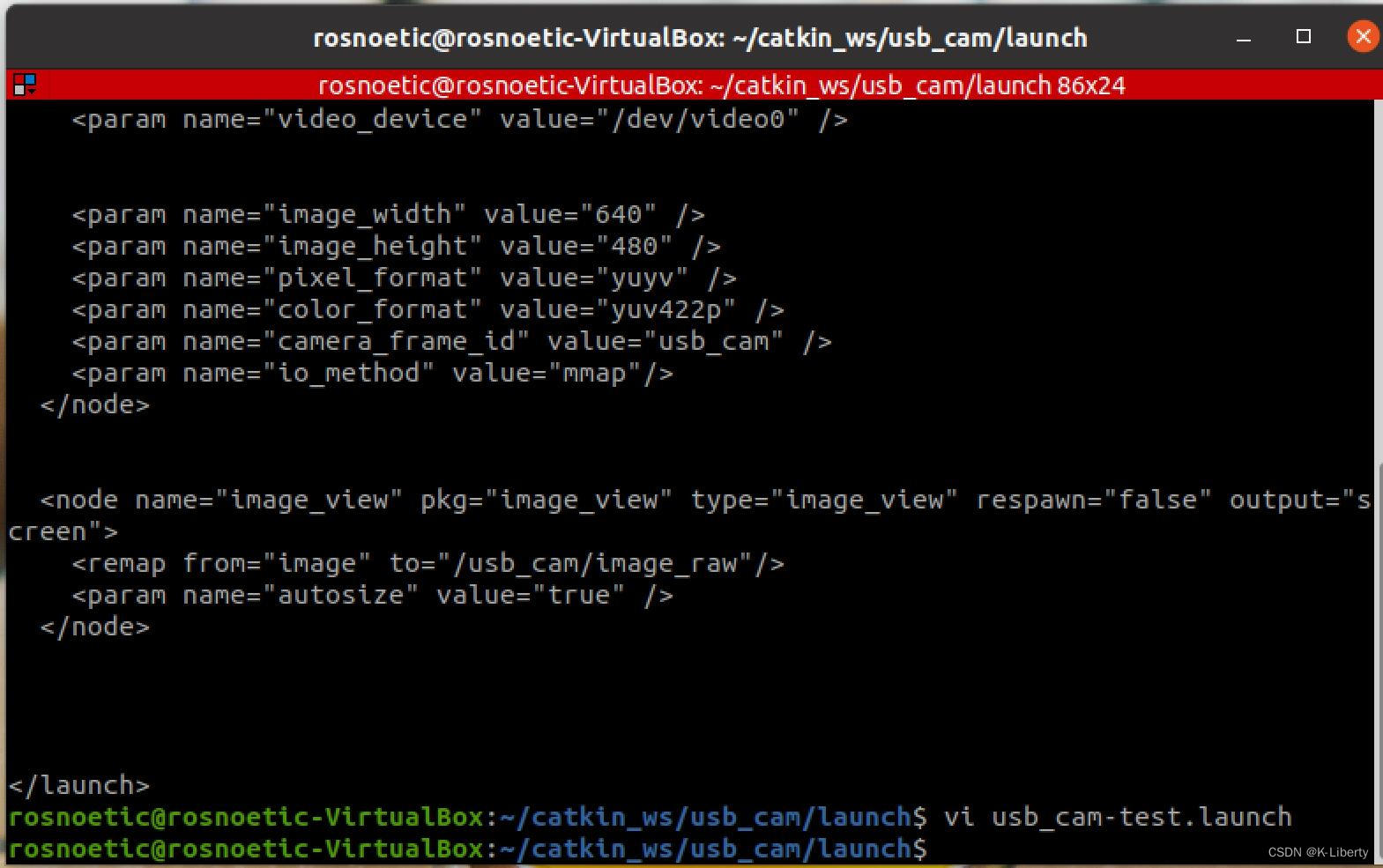
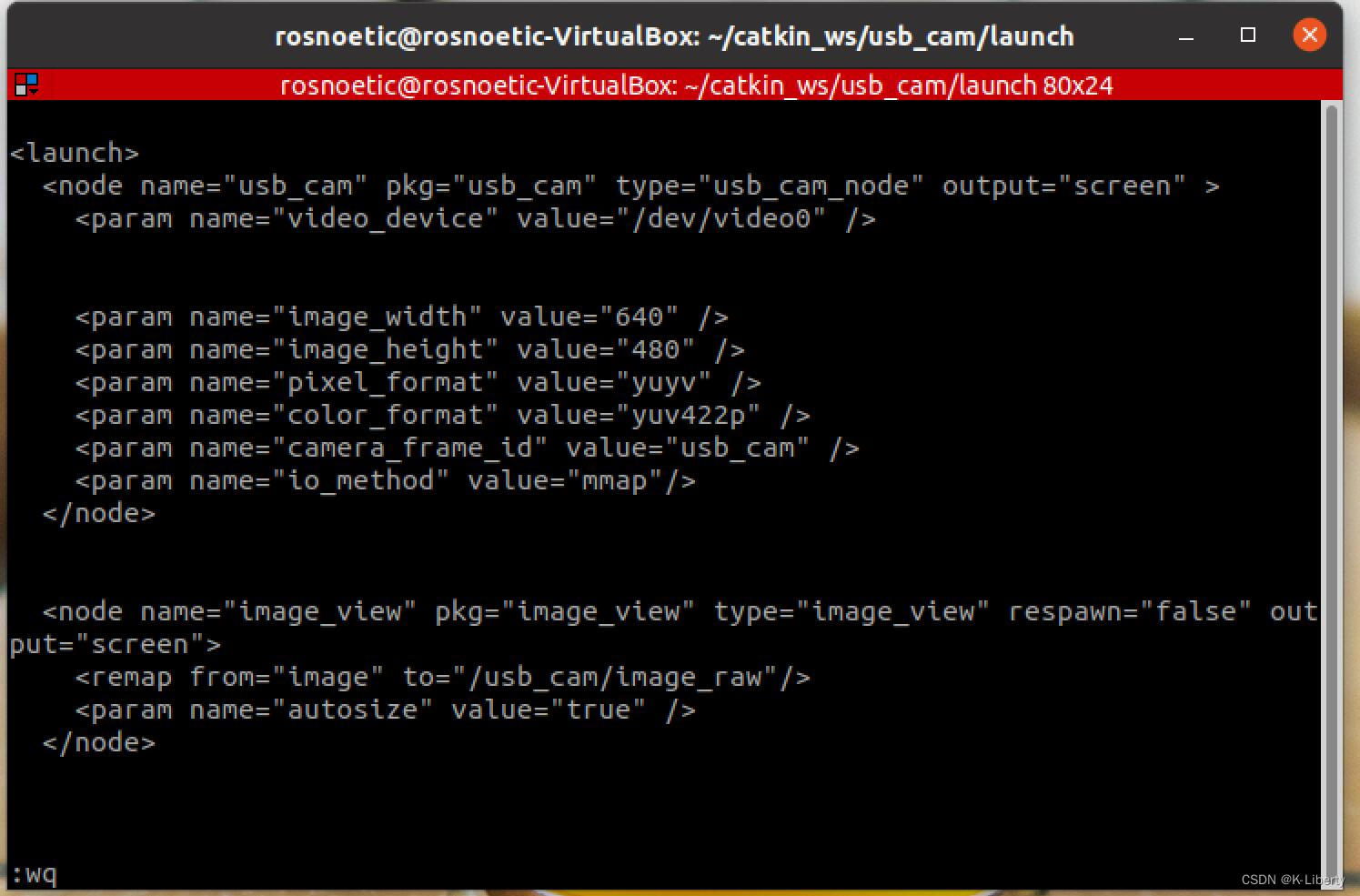
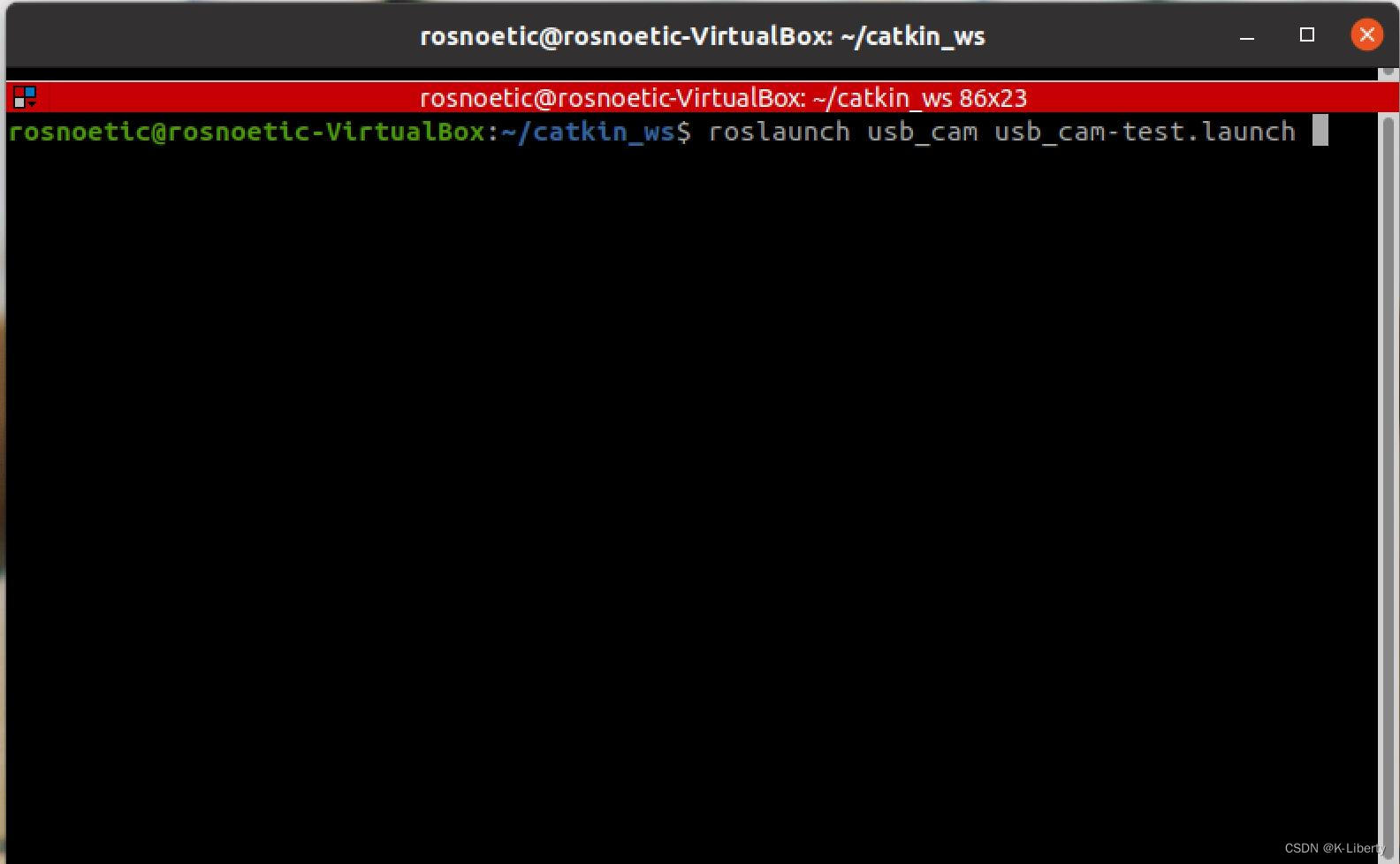
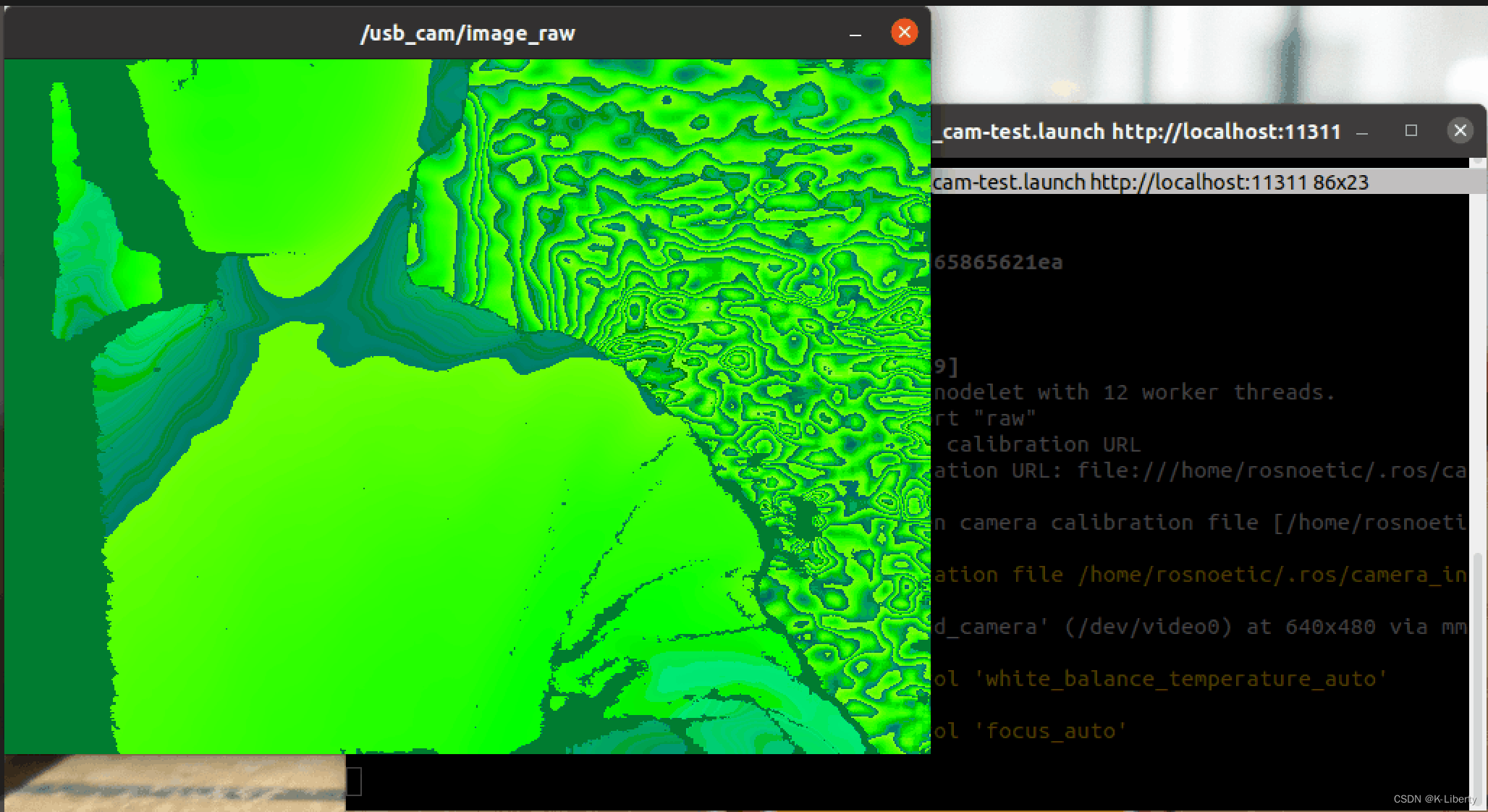
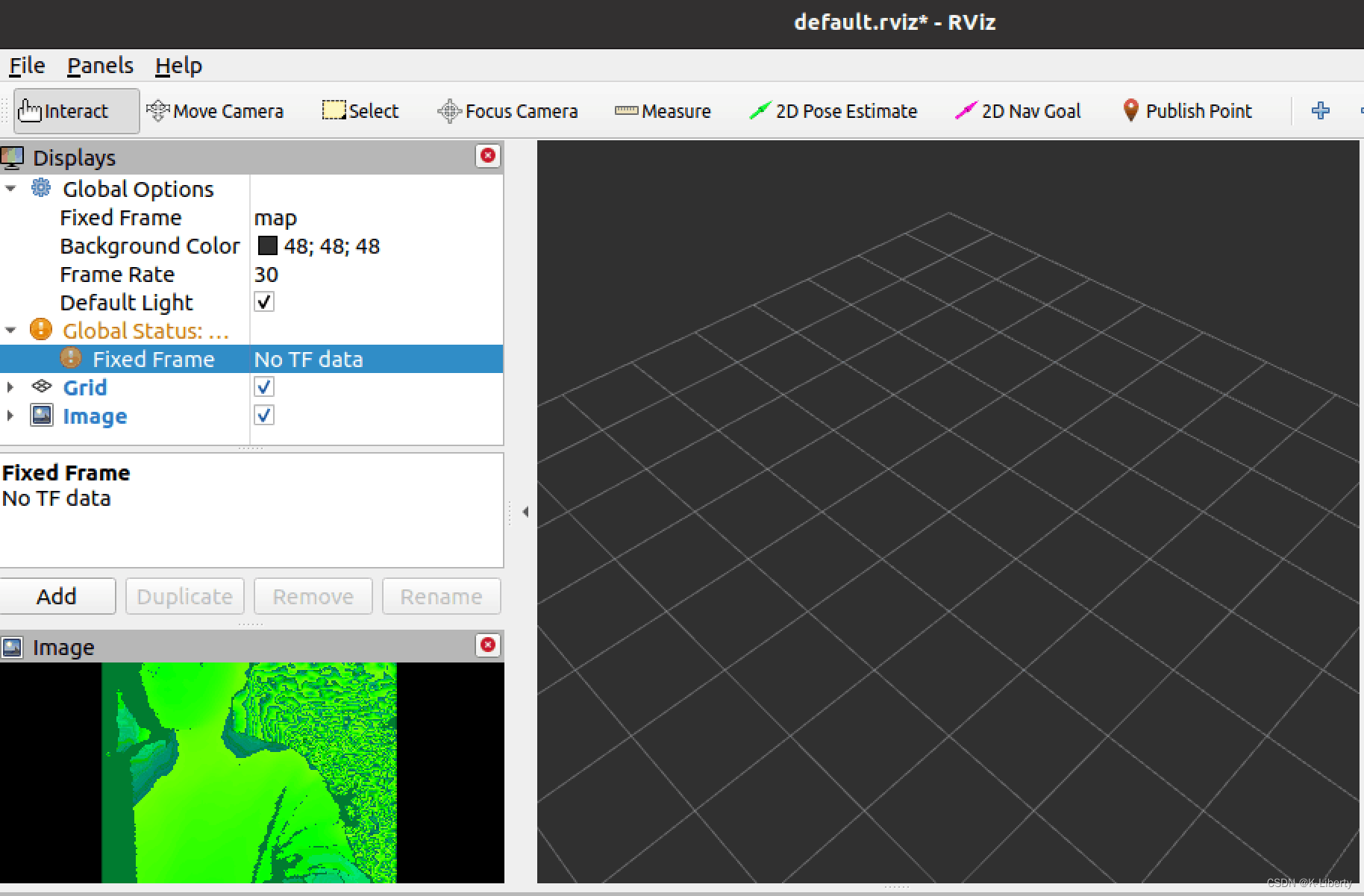
启动ROS节点以读取和发布相机数据流。如使用usb_cam,可以通过命令行运行roslaunch usb_cam usb_cam-test.launch,这会创建一个节点并发布话题(topic),通常是/image_raw用于原始图像数据。
使用流程如下:

文章来源:https://blog.csdn.net/2301_79503228/article/details/135372615
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章