STC8H8K蓝牙智能巡线小车——3.按键开关状态获取
发布时间:2024年01月16日
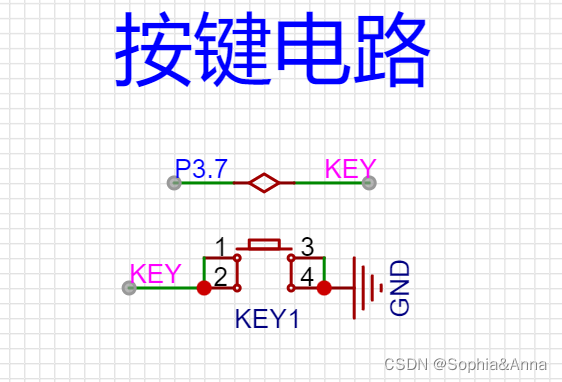
电路分析
- 引脚为P37
- 开关未按下时,P37是高电平
- 开关按下时,GND导通,P37是低电平
编程思路
- Driver目录中添加KEY.h文件,应包含引脚定义、开关GPIO实例化函数、开关状态获取函数以及当按下和未按下时执行不同的函数(函数指针作为函数参数)
- Driver目录中添加KEY.c文件,做具体实现
代码示例
KEY.H
#ifndef __KEY_H
#define __KEY_H
#include "GPIO.h"
#define KEY_PIN P37
void KEY_init();
void Key_Get_State(void(*keydown)(),void(*keyup)());
#endifKEY.C
#include "Key.h"
void KEY_init(){
GPIO_InitTypeDef GPIO_InitStructure; //结构定义
GPIO_InitStructure.Pin = GPIO_Pin_7; //指定要初始化的IO,
GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PP
GPIO_Inilize(GPIO_P3, &GPIO_InitStructure);//初始化
}
u8 last_state=1;
void Key_Get_State(void(*keydown)(),void(*keyup)()){
if (last_state==1&& KEY_PIN==0){
if(keydown != NULL){
keydown();
}
last_state=0;
}else if(last_state==0&& KEY_PIN==1){
if(keyup != NULL){
keyup();
}
last_state=1;
}
}main.c
#include "RTX51TNY.h"
#include "GPIO.h"
#include "NVIC.h"
#include "UART.h"
#include "Switch.h"
#include "LED.h"
#include "Key.h"
#define TASK_MAIN 0
#define TASK_LED 1
#define TASK_KEY 2
void UART_config(void) {
// >>> 记得添加 NVIC.c, UART.c, UART_Isr.c <<<
COMx_InitDefine COMx_InitStructure; //结构定义
COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTx
COMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)
COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 一般 110 ~ 115200
COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLE
COMx_InitStructure.BaudRateDouble = DISABLE; //波特率加倍, ENABLE或DISABLE
UART_Configuration(UART1, &COMx_InitStructure); //初始化串口1 UART1,UART2,UART3,UART4
NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
UART1_SW(UART1_SW_P30_P31); // 引脚选择, UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}
void task_led() _task_ TASK_LED{
while(1){
// left
LED_ON(left);
os_wait2(K_TMO, 100);
LED_OFF(left);
os_wait2(K_TMO, 100);
// right
LED_ON(right);
os_wait2(K_TMO, 100);
LED_OFF(right);
os_wait2(K_TMO, 100);
// Hazard lights
LED_ON(all);
os_wait2(K_TMO, 100);
// all off
LED_OFF(all);
os_wait2(K_TMO, 100);
}
}
void keydown(){
printf("key down");
}
void keyup(){
printf("key up");
}
void task_key() _task_ TASK_KEY{
KEY_init();
while(1){
Key_Get_State(keydown,keyup);
os_wait2(K_TMO, 4);
}
}
void task_main() _task_ TASK_MAIN{
EA=1;
//LED_init();
UART_config();
// os_create_task(TASK_LED);
os_create_task(TASK_KEY);
os_delete_task(0);
}
文章来源:https://blog.csdn.net/weixin_46157873/article/details/135621385
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- MES生产管理系统流程
- opencv中的几个重要函数
- FreeRTOS之队列集操作(实践)
- (自适应手机版)全屏滚动装修装潢公司网站模板
- 国考省考行测:语句排序2刷题
- validation-api与hibernate-validator;@Validated与@Valid
- React16源码: React中调度之batchedUpdates的源码实现
- 原码,补码的除法
- ES7 至 ES12 实用的新语法
- Jenkins集成Sonar Qube