Liunx:线程控制
? ? ? ?
目录
????????说线程的时候说过,liunx没有选择单独定义线程的数据结构和适配算法,而是用轻量级进程来实现线程,有人将轻量级进程的系统调用进行了封装,在应用层实现了线程的相关功能,目前大部分的liunx平台都默认安装了第三方库,pthread.h。
? ? ? ? 创建线程:pthread_create();
? ? ? ? man 一下该函数可以出现相关介绍:
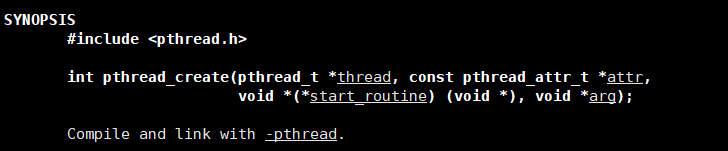
????????pthread_t *thread,输出型参数,一个进程可以创建多个线程,为了方便控制,该参数返回线程的id。这个是你在该函数之前需要定义的一个变量,pthread_t是一个长整型。?
? ? ?const pthread_attr_t *attr,用来设置创建线程时的属性,一般我们传递一个空指针,线程的属性使用系统默认的就可以。
????????void *(*start_routine) (void *),函数指针,该函数返回值是void*,参数是void*。我们暂时把它叫做功能函数。
????????void *arg,第三个参数传递了一个函数,这个参数将来会传给你的功能函数做参数。
? ? ? ? 线程创建成功返回0,线程创建失败以返回值的形式返回错误码。
#include <iostream>
#include <pthread.h>
#include <unistd.h>
using namespace std;
void *Function(void *arg)
{
while (true)
{
cout << "new thread: " << getpid() << endl
<< endl;
sleep(2);
}
}
int main()
{
pthread_t pid = 0;
int err = pthread_create(&pid, nullptr, Function, nullptr);
if (err == 0)
{
cout << " create thread successfully! " << endl;
}
while (true)
{
cout << "main thread: " << getpid() << endl
<< endl;
sleep(1);
}
return 0;
}? ? ? ? 上面的代码演示了怎么创建一个线程,运行:

????????ldd 可以查看你的程序链接了哪些库:

? ? ? ? 查看进程也能看到只有一个mythread:

? ? ? ? 从这也能说明,一个进程可以有多个线程,多个线程只是一个进程不同的执行流。
? ? ? ? 但是查看线程的话,你可以明显看到这两个执行流:
?

? ? ? ? LWP,light weight process id,轻量级进程id。PID=LWP的线程就是主线程,也就是程序运行最先创建的PCB。
? ? ? ? 当你任意的干掉一个线程,整个进程也会被干掉:
????????
? ? ? ? 我们kill 的不是主线程,而是进程中的一个新线程,进程中的任意一个线程崩溃都会导致整个进程的崩溃。专业点说,多线程较单线程,程序的健壮性降低。
? ? ? ? 还要说一下创建线程成功后的第一个参数的值,用%p格式打印::

? ? ? ? tid不等于LWP,实际上是一个地址,至于为什么,稍后说。
线程等待:pthread_join();

? ? ? ? 要等待某个线程,第一个参数就是创建该线程时的tid,第二个参数是用来取出你传入的功能函数的返回值。
? ? ? ? 等待成功返回0,失败返回错误码。
????????
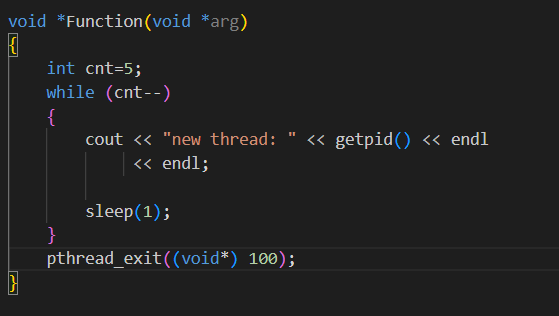
void *Function(void *arg)
{
int cnt=5;
while (cnt--)
{
cout << "new thread: " << getpid() << endl
<< endl;
sleep(1);
}
}
int main()
{
pthread_t pid = 0;
int err = pthread_create(&pid, nullptr, Function, nullptr);
if (err == 0)
{
cout << " create thread successfully! " << endl;
}
int err_join=pthread_join(pid,nullptr);
if(err_join==0)
{
cout<<" new thread wait successfully! main thread exit....."<<endl;
}
return 0;
}????????运行:

? ? ? ? 主线程在等待新线程5秒运行完成后才退出,默认是阻塞等待。如果主线程比新线程先退出,会造成类似于僵尸进程的情况,也就是新线程的创建的一些资源无法回收,造成内存泄露的问题。
? ? ? ? 然后再说第二个参数。我们要知道一个函数的执行情况是根据函数的返回值,假如说我们没法在应用层接收功能函数的返回值,请问你如何知道函数的执行情况?或者你说可以通过错误码,但是一个进程只有一个错误码,可你有多个线程。其次我们无法捕捉到线程的异常,线程异常后整个进程都退出了,程序崩溃之后你只能知道有异常,至于哪个线程抛出的,没有办法捕捉。还有就是我们不主要用这个参数来查看线程的执行情况,他还有其他用途,后面说。在说为什么是一个二级指针。
????????我们的功能函数返回一个void*值,这个值在应用层,我们就假设功能函数执行完成的返回值返回到了pthread_join()函数里,你想要拿到一个函数内部的void*类型的值,那你的输出型参数就应该是void** retval,在函数内部进行复制*retval(void*)=void* ;这样类型就匹配了。这样用:

线程退出:pthread_exit();
? ? ? ? 线程退出你直接可以用return,也可以用这个,哪个线程调用这个函数,哪个线程就退出。
线程取消:pthread_cancel()

? ? ? ? 在主线程里不等新线程运行结束就直接取消。
????????
int main()
{
pthread_t tid = 0;
int err = pthread_create(&pid, nullptr, Function, nullptr);
if (err == 0)
{
cout << " create thread successfully! " << endl;
}
sleep(1);//等待一秒确保线程创建成功
pthread_cancel(tid);
void* retval=nullptr;
pthread_join(tid,&retval);
cout<<" new thread wait successfully! "<<"exit:"<<(long long int)retval<<"main thread exit....."<<endl;
return 0;
}
?

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 2023年华为OD机试(python)B卷-符合要求的元组的个数-K数之和
- 【ICCV 2023】MPI-Flow:什么,只需要单张图片就能训练光流估计模型了?
- 基于模板匹配算法的车牌识别(Matlab代码)
- 企业初步数字化转型与指标管理
- MySQL同步ES的几种方案
- HOJ 项目部署-前端定制 默认勾选显示标签、 在线编辑器主题和字号大小修改、增加一言功能 题目AC后礼花绽放
- 区间DP(合并石子)的笔记
- 蓝鹏测控提前祝您2024元旦快乐!心想事成!
- ResNet 原论文及原作者讲解
- SV与C语言在验证环境中的交互