基于SIFT算法的图像匹配
发布时间:2024年01月18日
基本概念
尺度不变特征转换(Scale-invariant feature transform,简称SIFT) ,是一种用来侦测与描述影像中的局部性特征的算法,它在空间尺度中寻找极值点,提取位置、尺度、旋转不变量,生成特征描述子。 SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。
计算步骤?
SIFT算法主要分以下步骤:
(1)尺度空间极值点检测:搜索所有尺度上的图像位置,通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
(2)筛选出稳定的关键点:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
(3)确定关键点方向:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向。所有后面的对图像数据的操作都相对于关键点的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
(4)生成特征点描述子:在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度。这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变形和光照变化。
(5)特征点匹配
Matlab代码
%该函数读取图像并返回其SIFT“关键点”
function [image, descriptors, locs] = sift(imageFile)
image = imread(imageFile); % 读图
[rows, cols] = size(image);
% 转换为PGM格式,便于“关键点”可执行文件的读取
f = fopen('tmp.pgm', 'w');
if f == -1
error('Could not create file tmp.pgm.');
end
fprintf(f, 'P5\n%d\n%d\n255\n', cols, rows);
fwrite(f, image', 'uint8');
fclose(f);
%调用“关键点”可执行文件
if isunix
command = '!./sift ';
else
command = '!siftWin32 ';
end
command = [command ' <tmp.pgm >tmp.key'];
eval(command);
g = fopen('tmp.key', 'r');
if g == -1
error('Could not open file tmp.key.');
end
[header, count] = fscanf(g, '%d %d', [1 2]);
if count ~= 2
error('Invalid keypoint file beginning.');
end
num = header(1);
len = header(2);
if len ~= 128
error('Keypoint descriptor length invalid (should be 128).');
end
% x1, y1; 起始点
% x2, y2; 终止点
function TransformLine(imsize, keypoint, x1, y1, x2, y2)
len = 6 * keypoint(3);
s = sin(keypoint(4));
c = cos(keypoint(4));
% 变换
r1 = keypoint(1) - len * (c * y1 + s * x1);
c1 = keypoint(2) + len * (- s * y1 + c * x1);
r2 = keypoint(1) - len * (c * y2 + s * x2);
c2 = keypoint(2) + len * (- s * y2 + c * x2);
line([c1 c2], [r1 r2], 'Color', 'c');
%% 该函数读取两张图像,并找到它们的SIFT特征
function num = match(image1, image2)
[im1, des1, loc1] = sift(image1); %找出每张图的SIFT关键点
[im2, des2, loc2] = sift(image2);
distRatio = 0.6;
des2t = des2'; %预计算矩阵转置
for i = 1 : size(des1,1)
dotprods = des1(i,:) * des2t; % 点积向量
[vals,indx] = sort(acos(dotprods)); %取反余弦并对结果进行排序
%检查最近邻的角度是否小于2*distRatio.
if (vals(1) < distRatio * vals(2))
match(i) = indx(1);
else
match(i) = 0;
end
end
% 显示匹配点连接的图像
newImg = cat(2,im1,im2); %将两张图像放在一张图中
figure; imshow(newImg)
hold on
plot(loc1(:,2),loc1(:,1), 'ro','MarkerSize',5,'LineWidth',0.7)
plot(loc2(:,2)+size(im1,1),loc2(:,1), 'm*','MarkerSize',5,'LineWidth',0.7)
cols1 = size(im1,2);
for i = 1: size(des1,1)
if (match(i) > 0)
line([loc1(i,2) loc2(match(i),2)+cols1], ...
[loc1(i,1) loc2(match(i),1)], 'Color', 'c');
end
end
hold off;
num = sum(match > 0);
fprintf('Found %d matches.\n', num);
% 保存结果
frame=getframe(gcf);
im=frame2im(frame);
imwrite(im,'S图像匹配结果.jpg');
%% 主程序
img1=imread('baby1.JPG');
img2=imread('baby2.JPG');
img1_gray=rgb2gray(img1);
img2_gray=rgb2gray(img2);
match('img1_gray.jpg',' img2_gray.jpg ');
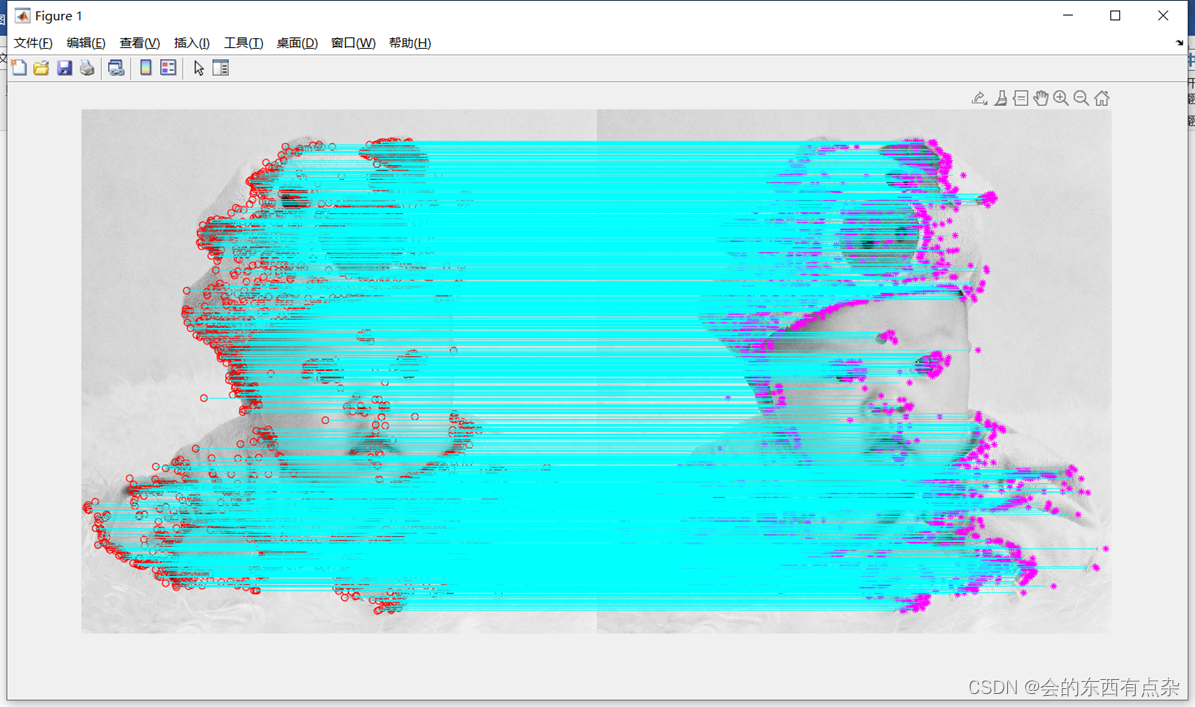
匹配结果
文章来源:https://blog.csdn.net/qq_20660115/article/details/135664659
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Transformer代码学习
- 【SpringBoot】配置 MyBatis
- MongoDB ReplicaSet 部署
- mini-Spring-BeanDefinition和BeanDefinitionRegistry(一)
- 网络安全工作者应该注意的八大事项!
- MySQL备份二-mysqldump
- OSPF:07 OSPF路由聚合
- vue3 全网最全教程-----(1)
- 信号量机制
- 第二证券:开通创业板交易权限的条件是什么?