Ubuntu20.04下A-LOAM配置安装及测试教程(包含报错问题踩坑)
参考文章:
ubuntu20.04下ros运行A-LOAM
Ubuntu20.04下运行LOAM系列:A-LOAM、LeGO-LOAM、SC-LeGO-LOAM、LIO-SAM 和 LVI-SAM
需要学习源码的同学可以下载LOAM论文
LOAM论文链接
1.需要安装的库文件
1.1Eigen 3.3
可以直接使用apt命令安装,或者去官网下载源码安装
sudo apt-get install libeigen3-dev
安装成功如下,我这里之前装过所以显示如下,可以看到安装的版本为3.3.7
1.2 ceres
//克隆下来,如果网络不好一直下载不了就去官网下载源码然后解压
git clone https://ceres-solver.googlesource.com/ceres-solver
//在当前目录下创建文件夹ceres-bin
sudo mkdir ceres-bin
cd ceres-bin
cmake ../ceres-solver
make -j4
make test
sudo make install
按照上面的步骤装好之后,我们再来测试一下ceres是否装好了
测试ceres
sudo mkdir ceres_test
cd ceres_test
touch CMakeLists.txt
touch cere_example.cpp
sudo mkdir build
cd build
cmake ..
make
./ceres_example
其中CMakeLists.txt和ceres_example.cpp文件内容分别如下
CMakeLists.txt
cmake_minimum_required(VERSION 3.8.0)
project(ceres_example)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
find_package(Ceres REQUIRED)
include_directories(
${CERES_INCLUDE_DIRS}
)
add_executable(ceres_example
ceres_example.cpp)
target_link_libraries(ceres_example
${CERES_LIBRARIES}
)
ceres_example
#include <ceres/ceres.h>
class CostFunctor {
public:
template <typename T>
bool operator()(const T* const x, T* residual) const
{
residual[0] = 10.0 - x[0];
return true;
}
};
int main(int argc, char const* argv[])
{
double initial_x = 5.0;
double x = initial_x;
// Build the problem.
ceres::Problem problem;
// Set up the only cost function (also known as residual). This uses
// auto-differentiation to obtain the derivative (jacobian).
ceres::CostFunction* cost_function = new ceres::AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
problem.AddResidualBlock(cost_function, nullptr, &x);
// Run the solver!
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
ceres::Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "x : " << initial_x
<< " -> " << x << "\n";
return 0;
}
运行后输出如下,就代表测试成功,ceres安装成功

1.3 pcl
同样的可以使用apt安装,或者去官网下载源码自行安装
sudo apt install libpcl-dev
2 下载编译A-LOAM
2.1下载源码
A-LOAM开源地址
//建立A-LOAM工作空间
sudo mkdir ALOAM
cd ALOAM
sudo mkdir src
cd src
//clone下来,如果网络不好同样可以直接去官网下载源码下来解压
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
2.2修改CMakeLists.txt
由于PCL版本1.10,将C++标准改为14,在A-LOAM源码中的CMakeLists.txt中进行如下修改
//set(CMAKE_CXX_FLAGS "-std=c++11")
set(CMAKE_CXX_FLAGS "-std=c++14")
2.2 修改源码
如果我们下载下来源码之后直接对其编译,是会发生报错的,因此我们需要对源码进行一些修改
- 将四个.cpp文件中的/camera_init修改为camera_init
- 将scanRegistration.cpp中的 #include <opencv/cv.h> 修改为#include <opencv2/imgproc.hpp>
- 修改kittiHelper.cpp中 CV_LOAD_IMAGE_GRAYSCALE为 cv::IMREAD_GRAYSCALE
- 如果编译遇到大量未找到Eigen相关错误,将四个.cpp文件中的#include <eigen3/Eigen/Dense>修改为#include <Eigen/Dense>
2.3 编译ALOAM
//定位至我们原来新建的工作空间中进行编译
cd ~/ALOAM/
catkin_make
编译成功显示如下
3 运行测试ALOAM
在A-LOAM源码中新建dataSet文件夹存放我们的数据集,将nsh_indooroutdoor.bag数据集下载至该文件夹中。
在A-LOAM源码中找打launch文件夹,在该文件夹中打开终端并输入如下命令
roslaunch aloam_velodyne_VLP_16.launch
然后再在dateSet文件夹中打开一个终端,输入如下命令开始播放数据集
rosbag play nsh_indoor_outdoor.bag
显示效果如下:
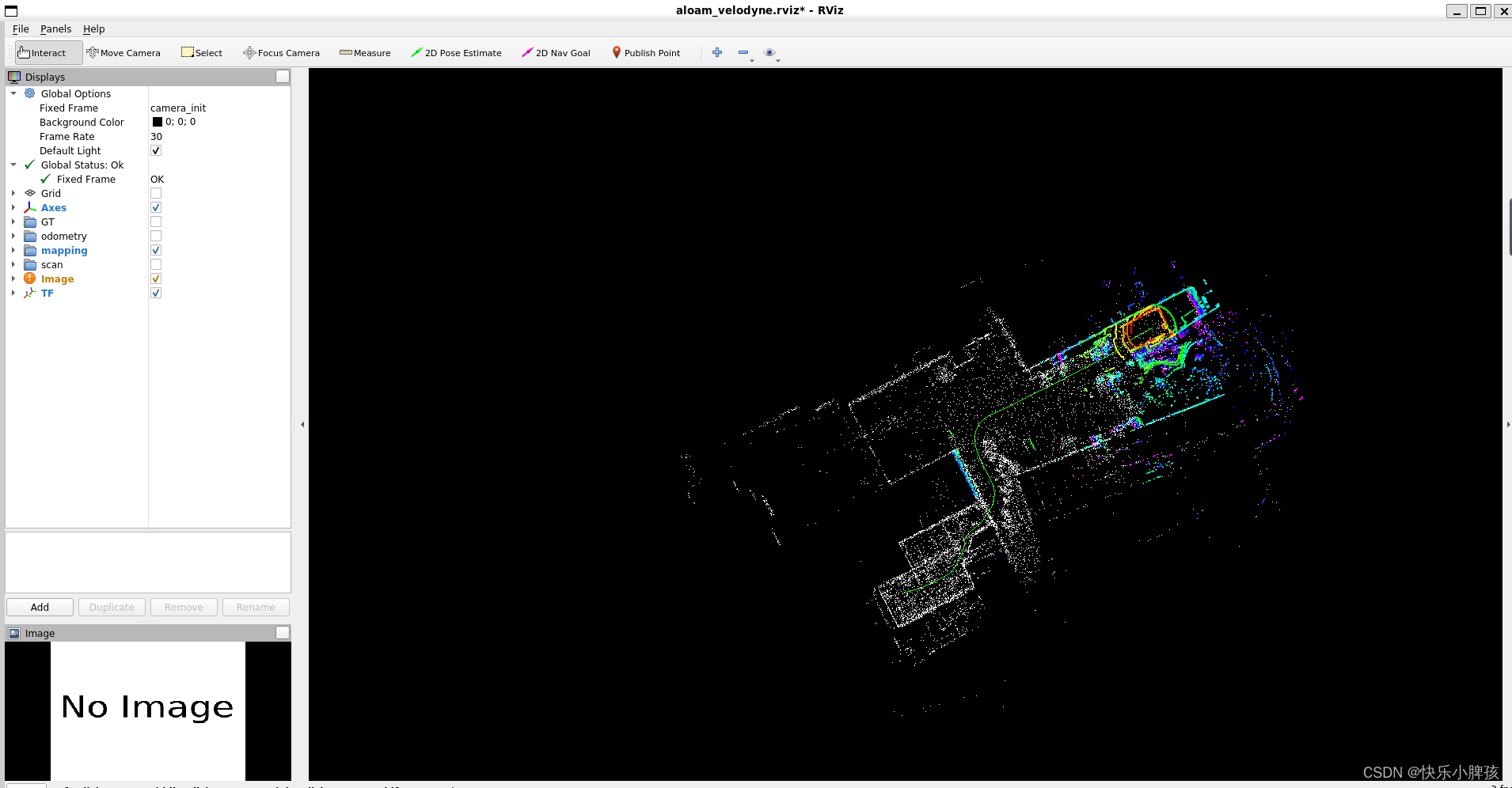
最后测试成功。
4 关于报错
如果我们在编译ALOAM的时候出现大量关于ceres的报错,如下图所示

解决方法:
是因为ceres版本的问题,我们可以将ceres更换至和A-LOAM配套的版本,或者进行如下的源码修改:
在laserMapping.cpp(row567-568)和 laserOdometry.cpp(row286-287)这两个cpp文件中,将如下代码
ceres::LocalParameterization *q_parameterization = new ceres::EigenQuaternionParameterization();
改为:
ceres::Manifold *q_parameterization = new ceres::EigenQuaternionManifold();
再次进行catkin_make发现编译成功,问题解决!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 洛谷 P1387 最大正方形 刷题笔记
- AI 魔法画笔、挥洒无限创意 | 开源日报 No.129
- yolo系列相关损失函数
- 第二证券:红利板块持续走强 机构关注高股息行情
- 如何成为ChatGPT 优质Prompt创作者
- 爬虫实战-微博评论爬取
- 基于SpringBoot的精品在线试题库系统(系统+数据库+文档)
- 使用Linux搭建svn
- 【开题报告】基于SpringBoot的美食制作学习网站的设计设计与实现
- 金融(个贷、网贷)短信群发操作指南