探索Apollo感知模块:解析世界的关键元素

?? 粉丝福利活动
-
?参与方式:通过连接报名观看课程,即可免费获取精美周边
-
??活动链接:《自动驾驶新人之旅》
-
📆 活动时间长期有效 | 课程姓名填写
鸽芷咕学号1111
完成后加博主微信填写问卷领取礼品,也可根据《活动步骤》 完成领取
🔥 注:可以拉取进度条观看,超过%50即可领取百度周边

?? 文章末尾扫码加入粉丝群,不定期发放粉丝福利,各种专业书籍免费赠送!
文章目录
前言
自动驾驶汽车( Self-Driving Car )也称为无人车、无人驾驶汽车,是指车辆能够依据自身对周围环境条件的感知、理解、自主进行运动控制、且能达到人类驾驶员水平的智能汽车。
一、感知的作用
而自动驾驶系统简单来说,即通过多种车载传感器(如摄像头、激光雷达、毫米波雷达、GPS、惯性传感器等)来识别车辆所处的周边环境和状态。

并根据所获得的环境信息(包含道路信息、交通信息、车辆位置、和障碍物信息等)自主做出分析和判断,从而自主地
控制车辆运动,最终实现“自动驾驶”。

二、Apollo感知模块的作用
百度Apollo感知模块的主要作用在于使车辆能够全方位、实时地感知周围环境,为决策和控制模块提供精准的输入。以下是感知模块的核心作用:
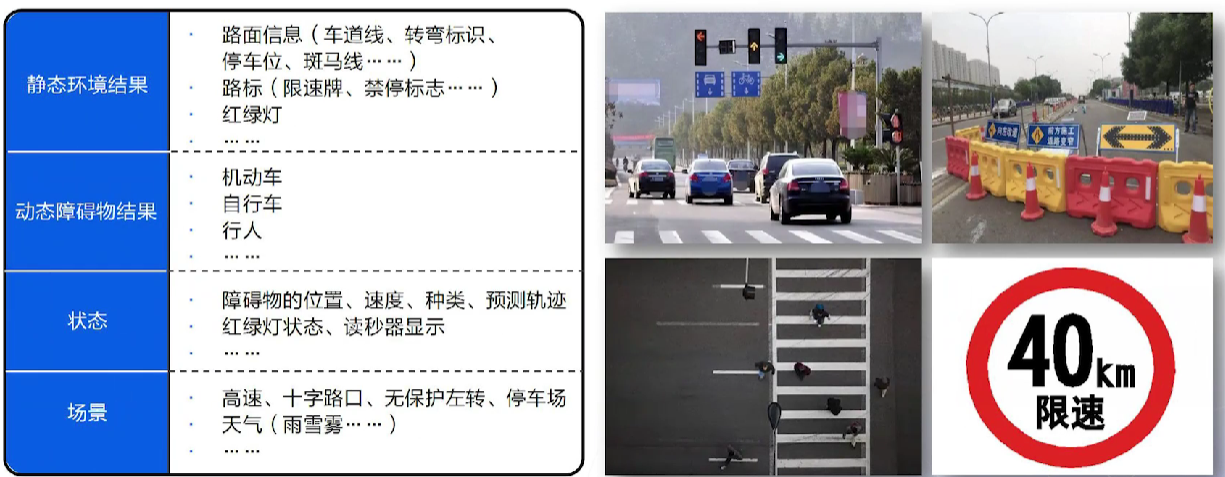
2.1 环境感知
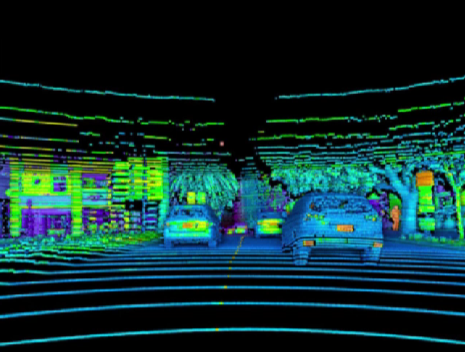
感知模块通过集成激光雷达、毫米波雷达、摄像头、超声波传感器等多种传感器,实时获取车辆周围的环境信息。这包括道路状况、障碍物位置、行人行为等。
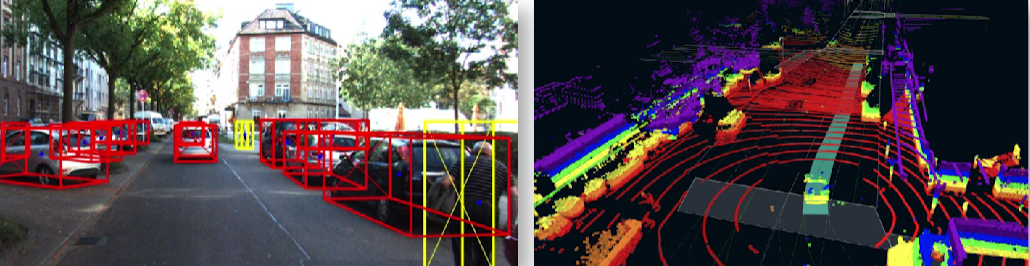
2.2 目标检测与识别
通过先进的目标检测算法,感知模块能够识别并定位道路上的车辆、行人、自行车等各类目标,提供对周围物体的详细认知。
2.3 障碍物识别与避障
感知模块利用激光雷达、毫米波雷达等传感器数据进行障碍物识别,为车辆规避障碍物提供及时、准确的信息,从而确保驾驶的安全性。
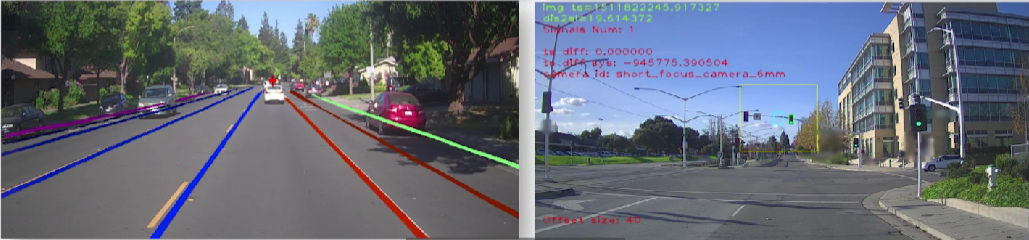
2.4 车道线检测
摄像头数据被用于车道线检测,帮助车辆保持正确的行驶轨迹,特别在高速公路等场景中具有重要意义。
三、Apollo感知模块的价值
3.1 提高行车安全性
感知模块的高精度环境感知和目标检测功能有助于提高车辆在不同道路状况下的行车安全性,减少交通事故的发生概率。
3.2 优化交通流
通过实时监测周围车辆和行人的动态信息,感知模块能够帮助车辆做出智能的驾驶决策,从而优化交通流,减少拥堵。
3.3 实现高度自动化驾驶
感知模块为车辆提供了全方位的环境感知能力,为实现高度自动化驾驶奠定了基础。在各种复杂交通场景下,车辆能够准确感知并做出相应的决策。
四、结语
百度Apollo感知模块的作用不仅在于提高车辆的安全性和智能性,更为实现自动驾驶的愿景提供了关键支持。随着技术的不断演进,感知模块将继续发挥重要作用,推动自动驾驶技术向更高层次发展。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- OpenCV-Python(48):K均值聚类
- 华为OD机试真题-开源项目热榜--Java-OD统一考试(C卷)
- 《数据库概述》 第七章 数据库设计
- 2024年寒假即将来临 如何实现高质量亲子陪伴?
- 玩转Mysql 四(MySQL逻辑架构与数据引擎)
- 【Web前端开发基础】CSS的结构伪类选择器、伪元素、浮动
- CMake+QT+大漠插件的桌面应用开发(QThread)
- bagging:随机森林
- dreamweaver网页设计作业制作 学生个人网页猫眼电影 WEB静态网页作业模板 大学生个人主页博客网页代码 dw个人网页作业成品
- C#如何探测图片的空白边沿,并切掉边沿白色