yolov8改进-添加Wise-IoU,yolov8损失改进
发布时间:2023年12月22日
1.在ultralytics/utils/metrics.py文件里找到 bbox_iou函数
注释整个函数
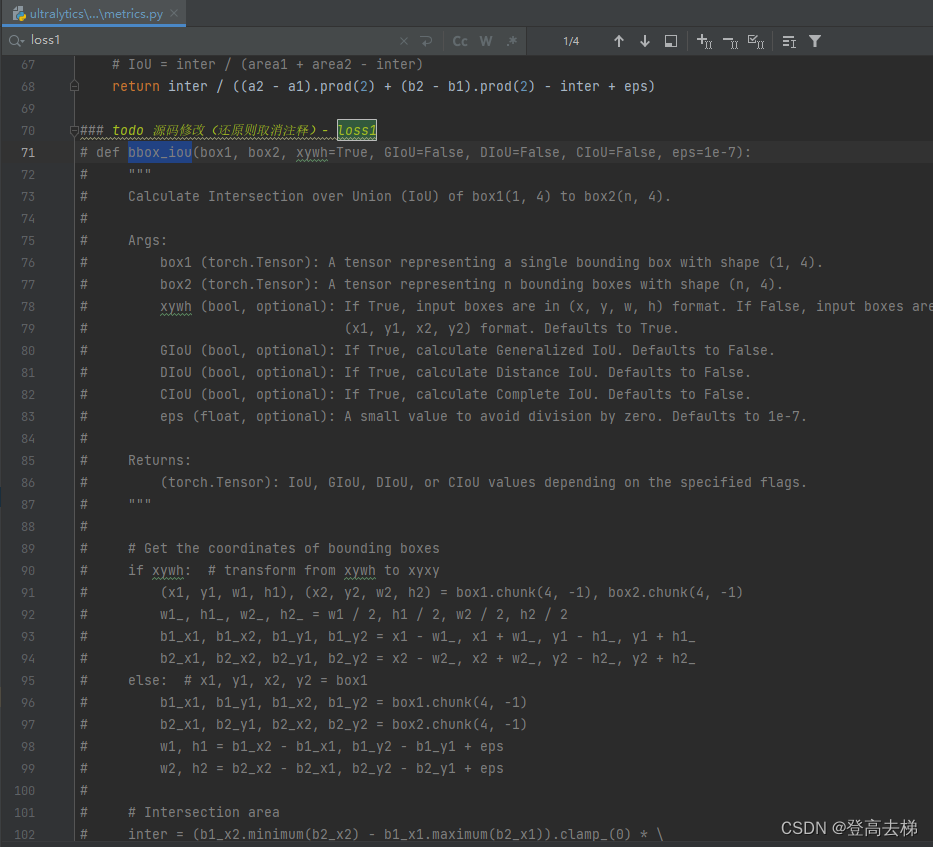
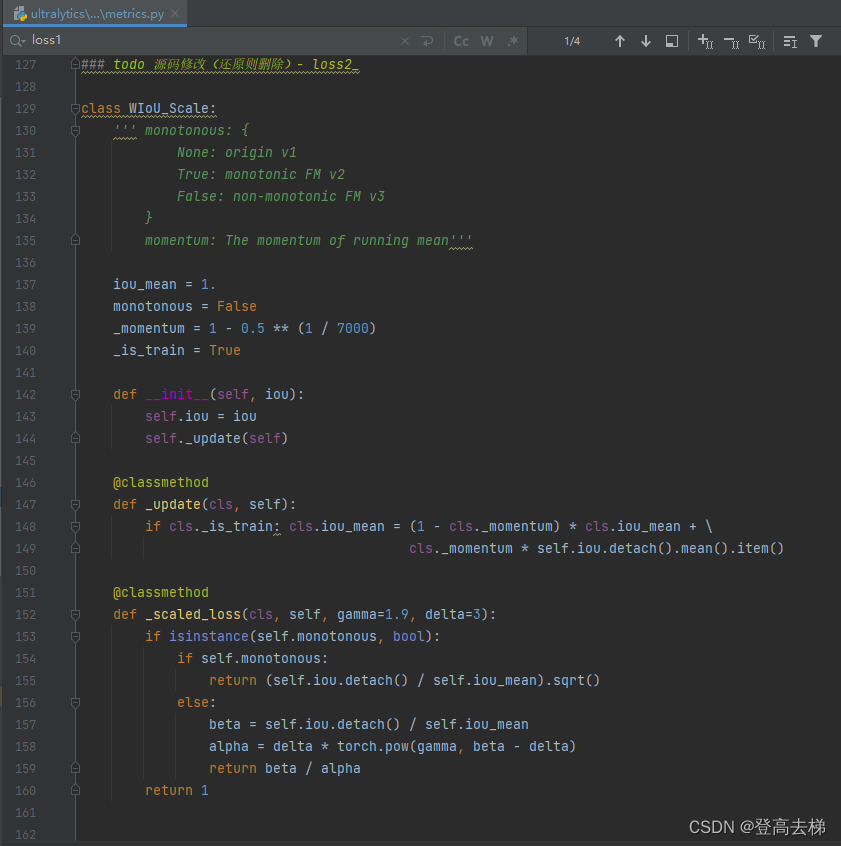
2.将注释的函数后面,去添加以下代码(替换上面注释的函数)
class WIoU_Scale:
''' monotonous: {
None: origin v1
True: monotonic FM v2
False: non-monotonic FM v3
}
momentum: The momentum of running mean'''
iou_mean = 1.
monotonous = False
_momentum = 1 - 0.5 ** (1 / 7000)
_is_train = True
def __init__(self, iou):
self.iou = iou
self._update(self)
@classmethod
def _update(cls, self):
if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \
cls._momentum * self.iou.detach().mean().item()
@classmethod
def _scaled_loss(cls, self, gamma=1.9, delta=3):
if isinstance(self.monotonous, bool):
if self.monotonous:
return (self.iou.detach() / self.iou_mean).sqrt()
else:
beta = self.iou.detach() / self.iou_mean
alpha = delta * torch.pow(gamma, beta - delta)
return beta / alpha
return 1
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, Focal=False,
alpha=1, gamma=0.5, scale=False, eps=1e-7):
# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
if scale:
self = WIoU_Scale(1 - (inter / union))
# IoU
# iou = inter / union # ori iou
iou = torch.pow(inter / (union + eps), alpha) # alpha iou
if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (
b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha_ciou = v / (v - iou + (1 + eps))
if Focal:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),
gamma) # Focal_CIoU
else:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = torch.pow(cw ** 2 + eps, alpha)
ch2 = torch.pow(ch ** 2 + eps, alpha)
if Focal:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),
gamma) # Focal_EIou
else:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
elif SIoU:
# SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Focal:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(
inter / (union + eps), gamma) # Focal_SIou
else:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
elif WIoU:
if Focal:
raise RuntimeError("WIoU do not support Focal.")
elif scale:
return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp(
(rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
else:
return iou, torch.exp((rho2 / c2)) # WIoU v1
if Focal:
return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoU
else:
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
if Focal:
return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),
gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
else:
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
if Focal:
return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoU
else:
return iou # IoU
### 源码修改(还原则删除)- loss2 - end
参考链接:
原文链接:https: // blog.csdn.net / darkredrock / article / details / 130292080
原文链接:https: // blog.csdn.net / weixin_45303602 / article / details / 133748724
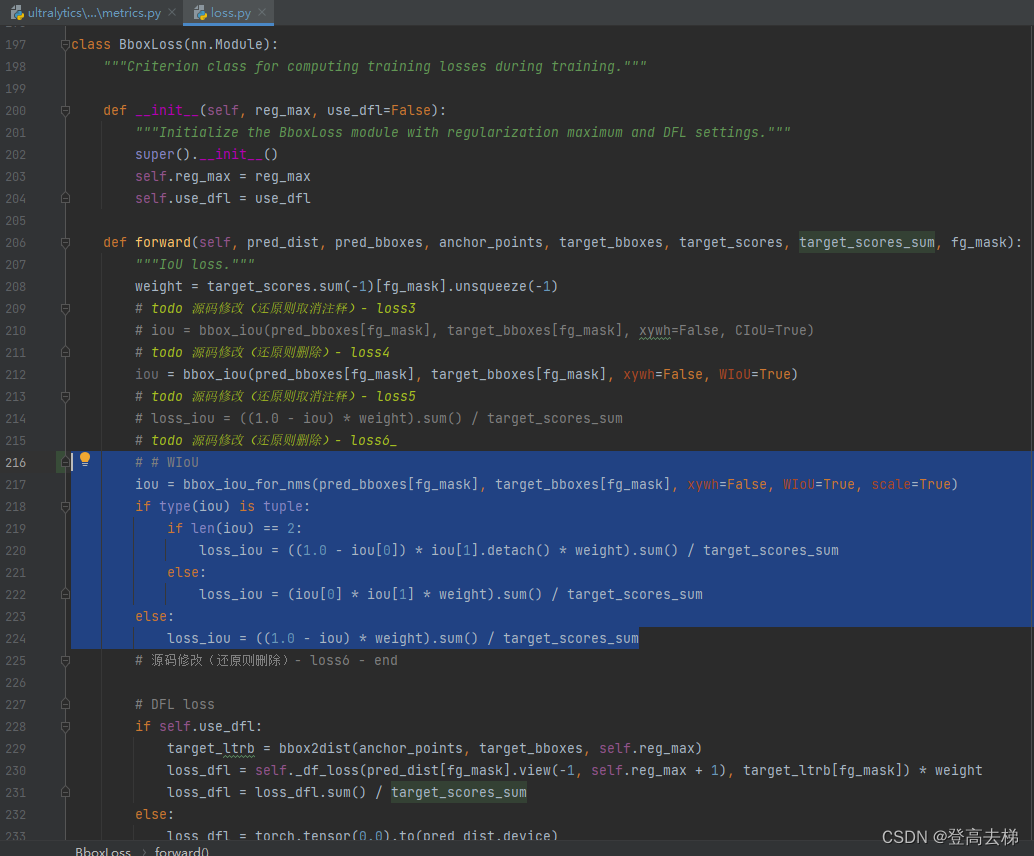
3.ultralytics/utils/loss.py文件里,找到BboxLoss类中的forward
找到下面两行代码
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
替换为以下代码:
# todo 源码修改(还原则删除)- loss6_
# # WIoU
iou = bbox_iou_for_nms(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, WIoU=True, scale=True)
if type(iou) is tuple:
if len(iou) == 2:
loss_iou = ((1.0 - iou[0]) * iou[1].detach() * weight).sum() / target_scores_sum
else:
loss_iou = (iou[0] * iou[1] * weight).sum() / target_scores_sum
else:
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
# 源码修改(还原则删除)- loss6 - end
4.还是loss文件中,添加以下bbox_iou_for_nms代码
# todo 源码修改(还原则删除)- loss7(2)_
def bbox_iou_for_nms(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False,
Focal=False, alpha=1, gamma=0.5, scale=False, eps=1e-7):
# Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
if scale:
self = WIoU_Scale(1 - (inter / union))
# IoU
# iou = inter / union # ori iou
iou = torch.pow(inter / (union + eps), alpha) # alpha iou
if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (
b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha_ciou = v / (v - iou + (1 + eps))
if Focal:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),
gamma) # Focal_CIoU
else:
return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
elif EIoU:
rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
cw2 = torch.pow(cw ** 2 + eps, alpha)
ch2 = torch.pow(ch ** 2 + eps, alpha)
if Focal:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),
gamma) # Focal_EIou
else:
return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
elif SIoU:
# SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
sin_alpha_1 = torch.abs(s_cw) / sigma
sin_alpha_2 = torch.abs(s_ch) / sigma
threshold = pow(2, 0.5) / 2
sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
rho_x = (s_cw / cw) ** 2
rho_y = (s_ch / ch) ** 2
gamma = angle_cost - 2
distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
if Focal:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(
inter / (union + eps), gamma) # Focal_SIou
else:
return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
elif WIoU:
if Focal:
raise RuntimeError("WIoU do not support Focal.")
elif scale:
return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp(
(rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
else:
return iou, torch.exp((rho2 / c2)) # WIoU v1
if Focal:
return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoU
else:
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
if Focal:
return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),
gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
else:
return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
if Focal:
return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoU
else:
return iou # IoU
# def soft_nms(bboxes, scores, iou_thresh=0.5, sigma=0.5, score_threshold=0.25):
# order = torch.arange(0, scores.size(0)).to(bboxes.device)
# keep = []
#
# while order.numel() > 1:
# if order.numel() == 1:
# keep.append(order[0])
# break
# else:
# i = order[0]
# keep.append(i)
# # todo 源码修改(还原则取消注释)- loss10_
# iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]]).squeeze()
# # todo 源码修改(还原则删除)- loss11_
# # iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]],WIoU=True).squeeze()
# # iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]],WIoU=True)
#
# idx = (iou > iou_thresh).nonzero().squeeze()
# if idx.numel() > 0:
# iou = iou[idx]
# newScores = torch.exp(-torch.pow(iou, 2) / sigma)
# scores[order[idx + 1]] *= newScores
#
# newOrder = (scores[order[1:]] > score_threshold).nonzero().squeeze()
# if newOrder.numel() == 0:
# break
# else:
# maxScoreIndex = torch.argmax(scores[order[newOrder + 1]])
# if maxScoreIndex != 0:
# newOrder[[0, maxScoreIndex],] = newOrder[[maxScoreIndex, 0],]
# order = order[newOrder + 1]
#
# return torch.LongTensor(keep)
# 源码修改(还原则删除)- loss7(2) - end
原参考链接是在metrics.py下添加上述bbox_iou_for_nms代码,可参考,不过我这边报错,已注释
# todo 源码修改(还原则删除)- loss7_
# def bbox_iou_for_nms(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False,
# Focal=False, alpha=1, gamma=0.5, scale=False, eps=1e-7):
# # Returns Intersection over Union (IoU) of box1(1,4) to box2(n,4)
#
# # Get the coordinates of bounding boxes
# if xywh: # transform from xywh to xyxy
# (x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
# w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
# b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
# b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
# else: # x1, y1, x2, y2 = box1
# b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
# b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
# w1, h1 = b1_x2 - b1_x1, (b1_y2 - b1_y1).clamp(eps)
# w2, h2 = b2_x2 - b2_x1, (b2_y2 - b2_y1).clamp(eps)
#
# # Intersection area
# inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp(0) * \
# (b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp(0)
#
# # Union Area
# union = w1 * h1 + w2 * h2 - inter + eps
# if scale:
# self = WIoU_Scale(1 - (inter / union))
#
# # IoU
# # iou = inter / union # ori iou
# iou = torch.pow(inter / (union + eps), alpha) # alpha iou
# if CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:
# cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
# ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
# if CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
# c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared
# rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (
# b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2
# if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
# v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
# with torch.no_grad():
# alpha_ciou = v / (v - iou + (1 + eps))
# if Focal:
# return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter / (union + eps),
# gamma) # Focal_CIoU
# else:
# return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU
# elif EIoU:
# rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2
# rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2
# cw2 = torch.pow(cw ** 2 + eps, alpha)
# ch2 = torch.pow(ch ** 2 + eps, alpha)
# if Focal:
# return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter / (union + eps),
# gamma) # Focal_EIou
# else:
# return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou
# elif SIoU:
# # SIoU Loss https://arxiv.org/pdf/2205.12740.pdf
# s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps
# s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps
# sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)
# sin_alpha_1 = torch.abs(s_cw) / sigma
# sin_alpha_2 = torch.abs(s_ch) / sigma
# threshold = pow(2, 0.5) / 2
# sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)
# angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)
# rho_x = (s_cw / cw) ** 2
# rho_y = (s_ch / ch) ** 2
# gamma = angle_cost - 2
# distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)
# omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)
# omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)
# shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)
# if Focal:
# return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(
# inter / (union + eps), gamma) # Focal_SIou
# else:
# return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou
# elif WIoU:
# if Focal:
# raise RuntimeError("WIoU do not support Focal.")
# elif scale:
# return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp(
# (rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051
# else:
# return iou, torch.exp((rho2 / c2)) # WIoU v1
# if Focal:
# return iou - rho2 / c2, torch.pow(inter / (union + eps), gamma) # Focal_DIoU
# else:
# return iou - rho2 / c2 # DIoU
# c_area = cw * ch + eps # convex area
# if Focal:
# return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter / (union + eps),
# gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf
# else:
# return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf
# if Focal:
# return iou, torch.pow(inter / (union + eps), gamma) # Focal_IoU
# else:
# return iou # IoU
#
#
# def soft_nms(bboxes, scores, iou_thresh=0.5, sigma=0.5, score_threshold=0.25):
# order = torch.arange(0, scores.size(0)).to(bboxes.device)
# keep = []
#
# while order.numel() > 1:
# if order.numel() == 1:
# keep.append(order[0])
# break
# else:
# i = order[0]
# keep.append(i)
# # todo 源码修改(还原则取消注释)- loss10_
# # iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]]).squeeze()
# # todo 源码修改(还原则删除)- loss11_
# # iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]],WIoU=True).squeeze()
# """
# # 如果,iou等于下面这个-1
# iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]],WIoU=True)
# print(f"--------为解决bug,打印iou--------:{iou}")
# print(f"--------为解决bug,打印iou的类型--------:{type(iou)}") #<class 'tuple'>
# print(f"--------为解决bug,打印iou[0]的形状--------:{iou[0].shape}") # torch.Size([503, 1]) # torch.Size([6693, 1]) # torch.Size([4298, 1])
# print(f"--------为解决bug,打印iou[1]的形状--------:{iou[1].shape}") # torch.Size([503, 1]) # torch.Size([6693, 1]) # torch.Size([4298, 1])
# print(f"--------为解决bug,打印iou的len--------:{len(iou)}") # 2
# # 那么,iou是元组类型,元组里装了两个tensor,每个tensor的shape [x,1] # 即 (tensor(x,1),tensor(x,1))
# """
# """
# # 如果,iou等于下面这个-2
# iou = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]],WIoU=True)[0]
# print(f"--------为解决bug,打印iou--------:{iou}")
# print(f"--------为解决bug,打印iou的类型--------:{type(iou)}") # <class 'torch.Tensor'>
# print(f"--------为解决bug,打印iou[0]的形状--------:{iou[0].shape}") # torch.Size([1])
# print(f"--------为解决bug,打印iou[1]的形状--------:{iou[1].shape}") # torch.Size([1])
# print(f"--------为解决bug,打印iou的len--------:{len(iou)}") # 29
# # scores[order[idx + 1]] *= newScores --报错--> # RuntimeError: The size of tensor a (16) must match the size of tensor b (2) at non-singleton dimension 1
# """
#
# """
# # 如果,iou等于下面这个-3
# iou_temp = bbox_iou_for_nms(bboxes[i], bboxes[order[1:]], WIoU=True)
# iou = (iou_temp[0].squeeze(),iou_temp[1].squeeze())
# print(f"--------为解决bug,打印iou--------:{iou}")
# print(f"--------为解决bug,打印iou的类型--------:{type(iou)}")
# print(f"--------为解决bug,打印iou[0]的形状--------:{iou[0].shape}")
# print(f"--------为解决bug,打印iou[1]的形状--------:{iou[1].shape}")
# print(f"--------为解决bug,打印iou的len--------:{len(iou)}")
# """
# pass
# idx = (iou > iou_thresh).nonzero().squeeze()
# if idx.numel() > 0:
# iou = iou[idx]
# newScores = torch.exp(-torch.pow(iou, 2) / sigma)
# scores[order[idx + 1]] *= newScores
#
# newOrder = (scores[order[1:]] > score_threshold).nonzero().squeeze()
# if newOrder.numel() == 0:
# break
# else:
# maxScoreIndex = torch.argmax(scores[order[newOrder + 1]])
# if maxScoreIndex != 0:
# newOrder[[0, maxScoreIndex],] = newOrder[[maxScoreIndex, 0],]
# order = order[newOrder + 1]
#
# return torch.LongTensor(keep)
# 源码修改(还原则删除)- loss7 - end
文章来源:https://blog.csdn.net/weixin_44240141/article/details/135151447
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 安装Paddlehub报错
- http请求转发、springboot请求转发、servlet转发请求
- LinkSLA智能运维 优化企业运维的利器
- linux进程信号
- C 语言用户输入详解:scanf、fgets、内存地址解析及实用指南
- day14 JavaScript基础知识1
- Java毕业设计怎么做?
- idea使用docker-compose发布应用程序
- 什么是CFCA证书?
- 详解JavaScript异步编程之Promise