matlab simulink风力发电机变桨距PI控制仿真
1、内容简介
略
35-可以交流、咨询、答疑
2、内容说明
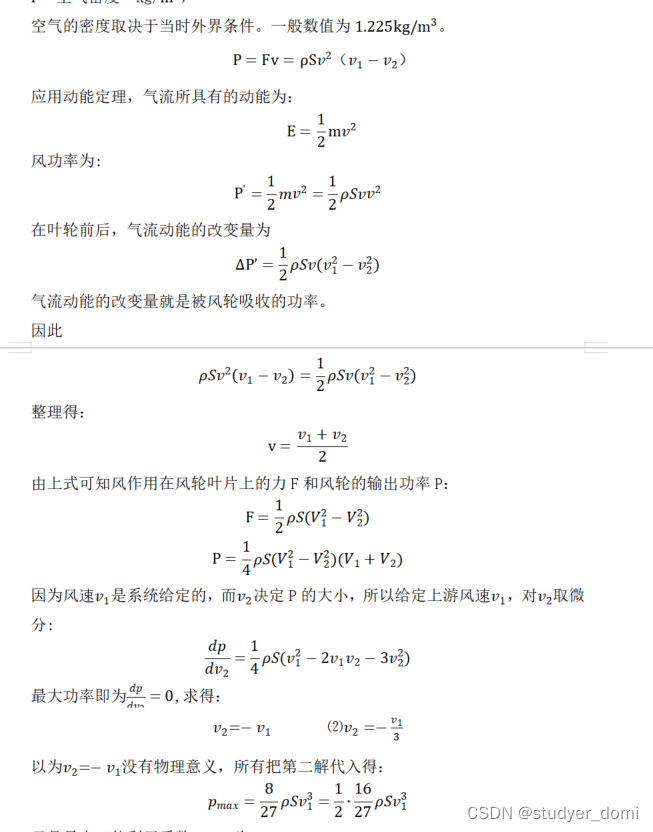
风力发电具有清洁、可再生、存储量大等优点而广受世界各国的青睐,本文针对2MW直驱式风电机组,研究在变风速条件下变浆距风力机的数学建模和仿真分析。应用simulink软件,建立了变浆距风力机的数学模型,进行相关的控制系统分析,并着重研究在了在超过额定风速情况下的控制系统调节能力。仿真结果表明,在风速低于额定风速的时候,系统能够追随风速的变化变化情况,不断调整,实现最佳的能量转换率,在风速超过额定风速的时候,控制系统能够控制作动起使桨叶节距角增加,从而保证输出功率稳定在额定功率范围内。
3、仿真分析
略

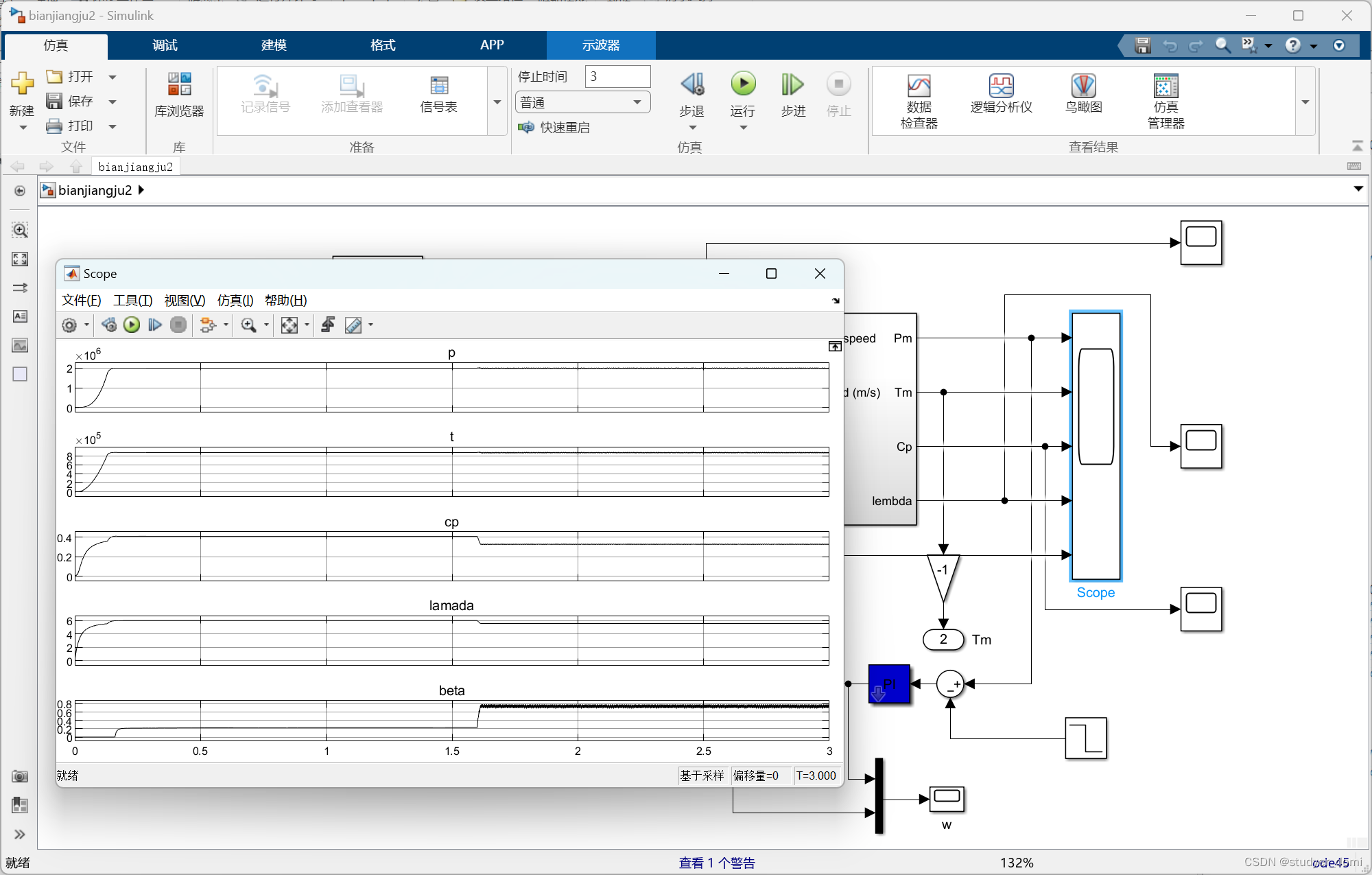
通过 Matlab 仿真得到了风电机组不同的性能参数。下图分别为风电机功率、转矩、风能最大利用系数、叶尖速比和桨叶节距角。由图可以发现风电机功率、转矩随着风速的增加也逐渐增加,直到达到额定值,额定功率为2Mw。风速稳定在13m/s后,系统的风电机功率、转矩保持恒定。在1.6s过后,由于速度超过系统的额定速度,控制系统增大桨叶节距角,保证系统的额定功率稳定在额定功率附近,由于控制系统的调节,此时系统的输出功率和转矩一直存在轻微波动,
图4.7?系统的响应
图4.8?风电机组输出功率
风电机组输出功率随着风速增加而增加,直到达到额定功率2?Mw。随着速度的进一步增加,控制系统控制桨叶节距角,从而保证系统的有稳定的输出功率,有结果曲线看出,系统的输出功率在振荡,可以优化PI参数来减小输出功率的振荡幅值。
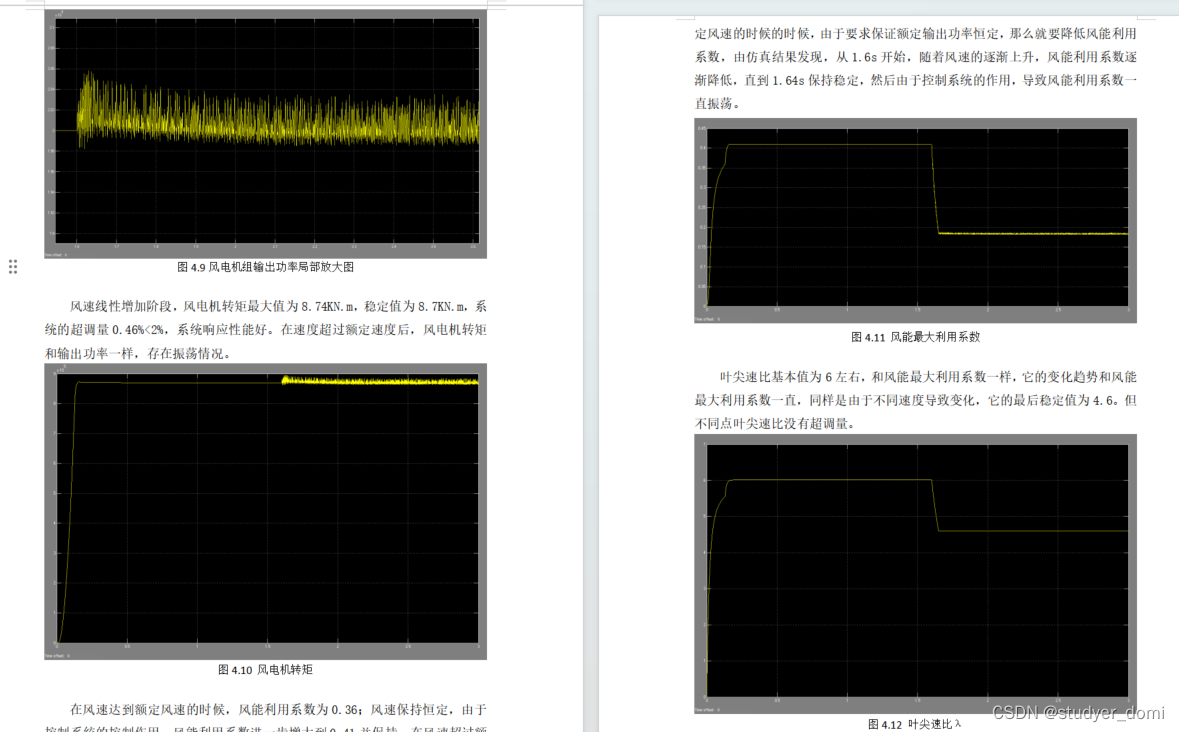
图4.9风电机组输出功率局部放大图
风速线性增加阶段,风电机转矩最大值为8.74KN.m,稳定值为8.7KN.m,系统的超调量0.46%<2%,系统响应性能好。在速度超过额定速度后,风电机转矩和输出功率一样,存在振荡情况。
图4.10?风电机转矩
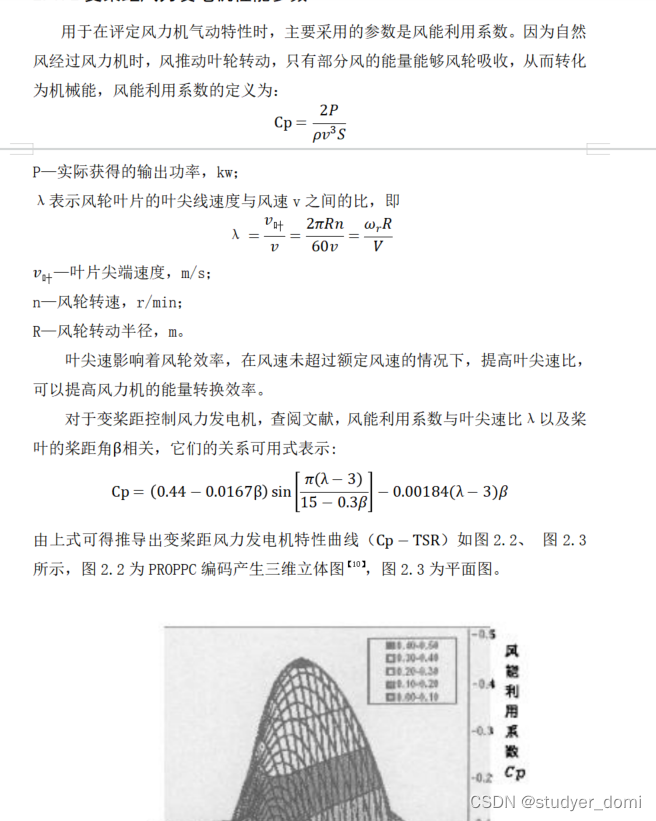
在风速达到额定风速的时候,风能利用系数为0.36;风速保持恒定,由于控制系统的控制作用,风能利用系数进一步增大到0.41并保持;在风速超过额定风速的时候的时候,由于要求保证额定输出功率恒定,那么就要降低风能利用系数,由仿真结果发现,从1.6s开始,随着风速的逐渐上升,风能利用系数逐渐降低,直到1.64s保持稳定,然后由于控制系统的作用,导致风能利用系数一直振荡。
图4.11?风能最大利用系数
叶尖速比基本值为6左右,和风能最大利用系数一样,它的变化趋势和风能最大利用系数一直,同样是由于不同速度导致变化,它的最后稳定值为4.6。但不同点叶尖速比没有超调量。
图4.12 叶尖速比
图4.12 叶尖速比
放大图
对于信号β,加入了滤波函数,
,该滤波器能够有效过滤系统中的高频信号,保留低频信号,滤波信号的幅频图如下。
图4.13滤波函数幅频图
图4.14桨距角
桨距角β其中黄线为滤波前信号,紫色线为滤波后的信号,说明在系统中,高频信号占有一定的成分,导致系统出现大的峰值,通过滤波器可以有效降低系统响应的超调量。这也说明了在控制系统中,必须增加一个高频滤波器,增设滤波器后,桨距角能够消除超调,同时振荡的幅值更加小,能够加快实现稳定。在额定速度情况下,桨距角稳定值为0.23rad。
为了对比不同风速下的风电机的性能,我们设置不同的速度研究风电机性能参数变化
Vmax=20m/s
Vmax=17m/s
Vmax=14m/s
对比不同速度下的风电机性能,我们发现随着最大风速的降低,由于控制系统的作用,系统的风电机功率、转矩保持不变;但风能最大利用系数和叶尖速比逐渐降低,符合理论分析;桨距角逐渐增加。
????本章节重点分析了在变风速下的风机系统。通过上文理论推导和本章节的模型仿真,验证了控制系统的稳定性。在风速低于额定风速的时候,系统能够追随风速的变化变化情况,不断调整,实现最佳的能量转换率,在风速超过额定风速的时候,能够调节桨叶节距角,稳定输出功率在额定功率范围内。
4、参考论文
略
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- javaWebssh运动会管理系统myeclipse开发mysql数据库MVC模式java编程计算机网页设计
- c# wpf 的触发器,触发器Trigger种类,每个触发器的使用说明
- Windows漏洞利用开发——利用ROP绕过DEP保护
- 《Effective C++》条款35
- Java实现 json diff 工具
- C++入门学习(一)写一个helloworld
- 用户管理第2节课 -- idea 2023.2 创建表--鱼皮
- 境外投资备案登记 境外投资备案注销 ODI备案登记所需资料
- odoo 一日一技 owl Registry
- python flask-wft