超维空间M1无人机使用说明书——51、ROS无人机使用AR二维码识别与定位
发布时间:2024年01月07日
引言:二维码识别与定位是指ROS通过创建AR标签并且对AR标签进行识别,标签可以由自己任意创建,具体方法会在文中给出,摄像头可以通过识别AR标签大小和姿态获取到标签对应的ID和位置等信息,实现识别与定位
注意:进行AR标签识别的时候,需要进行一些设置,主要是摄像头的校准和AR标签参数设置,完成这些步骤后才能拿到相对准确的位置信息
工作流程解析:
(1)、生成AR标签文件,并且打印出来,方便后续进行识别
(2)、启动摄像头
(3)、启动AR标签识别节点
一、使用ar-track-alvar创建二维码
创建三个二维码,边长8cm,二维码的内容分别为0、1、2
rosrun ar_track_alvar createMarker -s 8 0
rosrun ar_track_alvar createMarker -s 8 1
rosrun ar_track_alvar createMarker -s 8 2
在当前目录下查找创建的二维码文件并打印出来
二、启动摄像头识别二维码
roslaunch usb_cam usb_cam_test.launch
三、启动摄像头识别二维码
roslaunch robot_vision ar_track_camera.launch h
通过话题查看二维码的相对位置和对应的ID
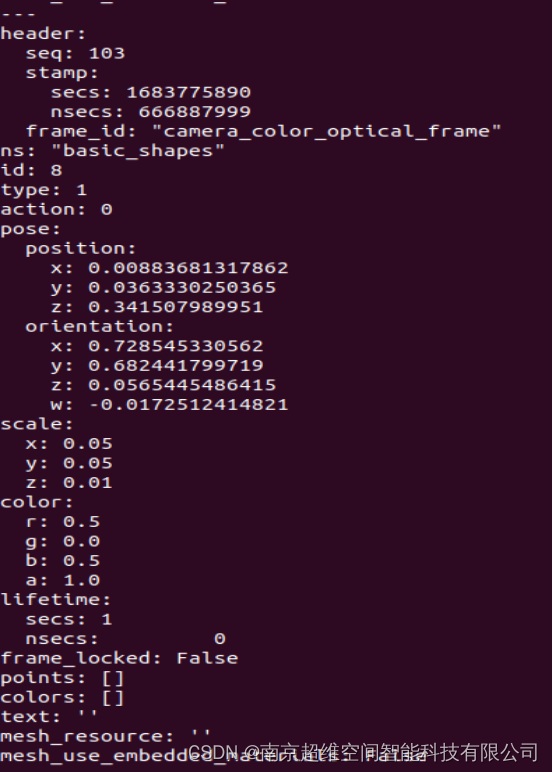
其中:
1、id:8则表示当前的二维码对应的序号是8
2、position则表示当前二维码相对于摄像头的位置
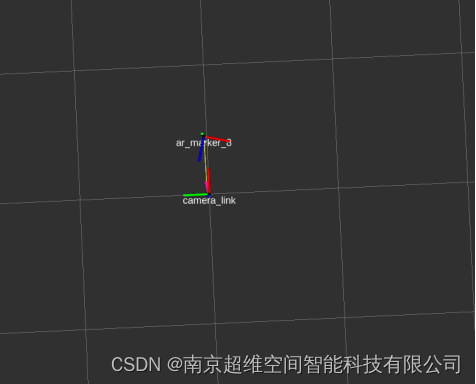
四、RVIZ查看二维码相对坐标位置
1、终端打开:rviz
2、查看TF坐标系即可
文章来源:https://blog.csdn.net/qq_35598561/article/details/135396972
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 计算机专业毕业生,找工作学C++还是Java?
- 遇到错误或不满足某些条件时提前退出函数在 C++ 编程中有什么指导意义?
- 图书管理系统
- AJAX入门到实战,学习前端框架前必会的(ajax+node.js+webpack+git)(七)
- 2024 十大AI预测
- Intra-Inter Camera Similarity for Unsupervised Person Re-Identification
- 多出口-热备---实验
- Elasticsearch 8.X进阶搜索之“图搜图”实战
- 案例174:基于微信小程序的教学质量评价系统
- 中国香港服务器:2024好用服务商有哪几家推荐