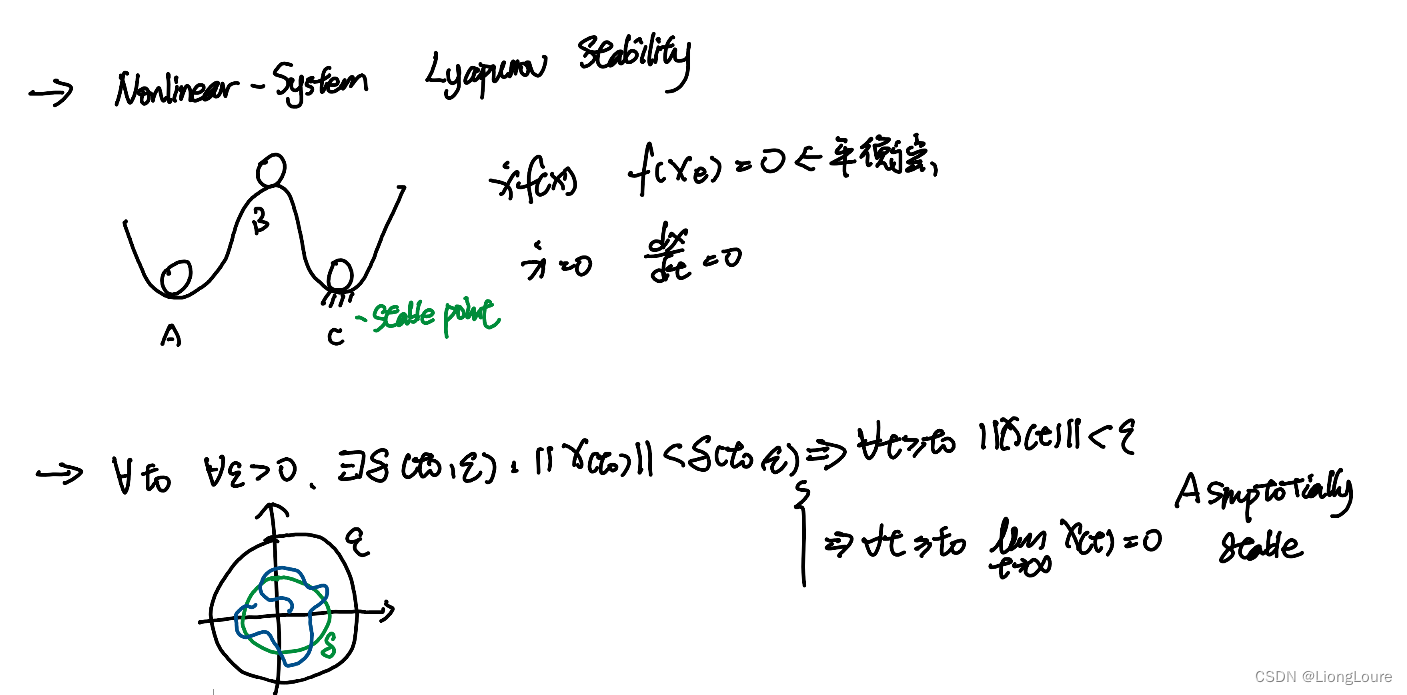
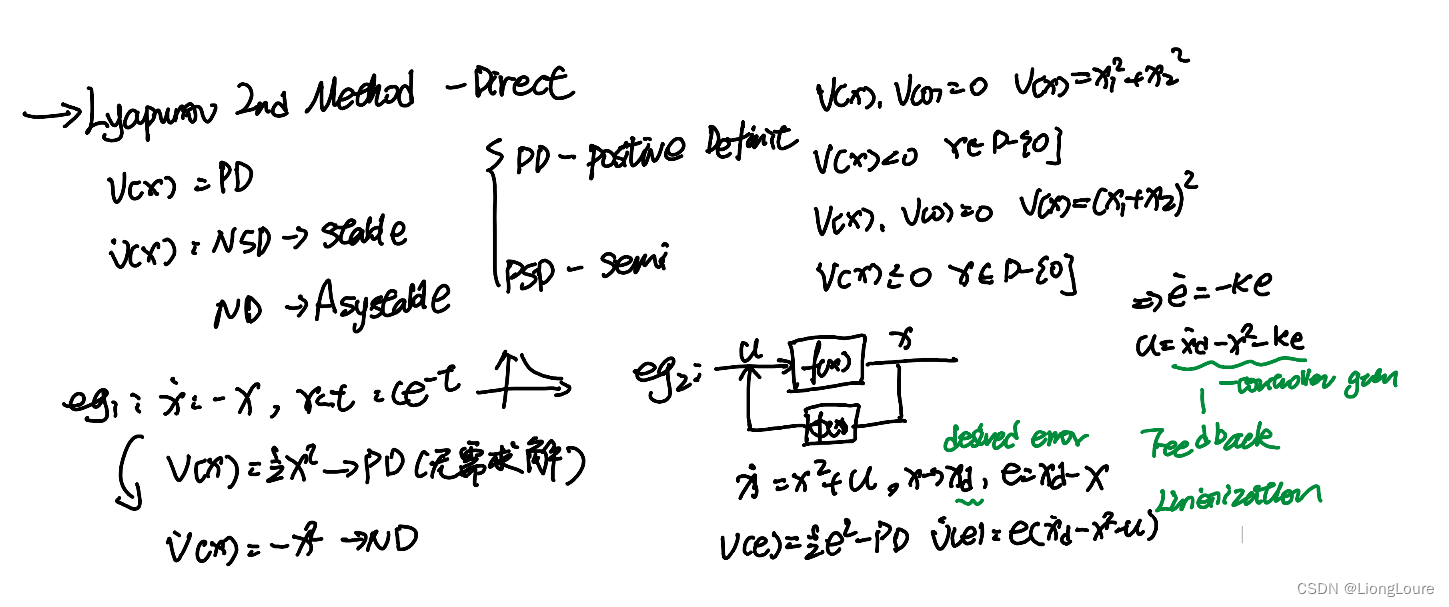
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-17 串讲
发布时间:2024年01月16日
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-Advanced控制理论 Ch04-17 串讲

文章来源:https://blog.csdn.net/LiongLoure/article/details/135619725
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- windows下redis使用教程
- 跨平台安装程序的开发工具:VMware InstallBuilder Enterprise for Mac
- 算法通关村第十六关—滑动窗口与堆结合(黄金)
- Redis 6.0 多线程模型比单线程优化在哪里了
- 【2023最新版】Wireshark安装保姆级教程(超详细),及简单使用Wireshark抓包
- 会议上老板说“take ten”,理解成“数到十”?那可太尴尬了!柯桥成人英语学习
- 小波基的选择
- 固态硬盘知识梳理
- 基于Redis的对象数据缓存思想与实现-Spring Cache框架
- c++学习笔记(14)-类的对象占用内存