手势识别MATLAB代码
手势识别是智能设备常用的需求,?下面我们用MATLAB来识别手部的形态:
主程序main.m
clc;clear all;close all;%清除命令行和窗口
im=imread('DSC05815.JPG');
[skin,bwycbcr,w,h] = hand_segmentation(im);
im1=bwycbcr;
% ?se = strel('ball',[1 1 1;1 1 1;1 1 1]);
?im1 = imdilate(im1,[1 1 1;1 1 1;1 1 1]);
?figure;
?imshow(im1);
?title('Dilated');
I_closed = imageclose(im1);
bw2=imadjust(I_closed,[0,1]);
%去除少像素连通区域
bw3=bwareaopen(bw2,round(w*h/10));
figure;
imshow(bw3);?
title('去除少数像素');
se=strel('disk',5);
I_closed2=imclose(bw3,se);
I=I_closed2;
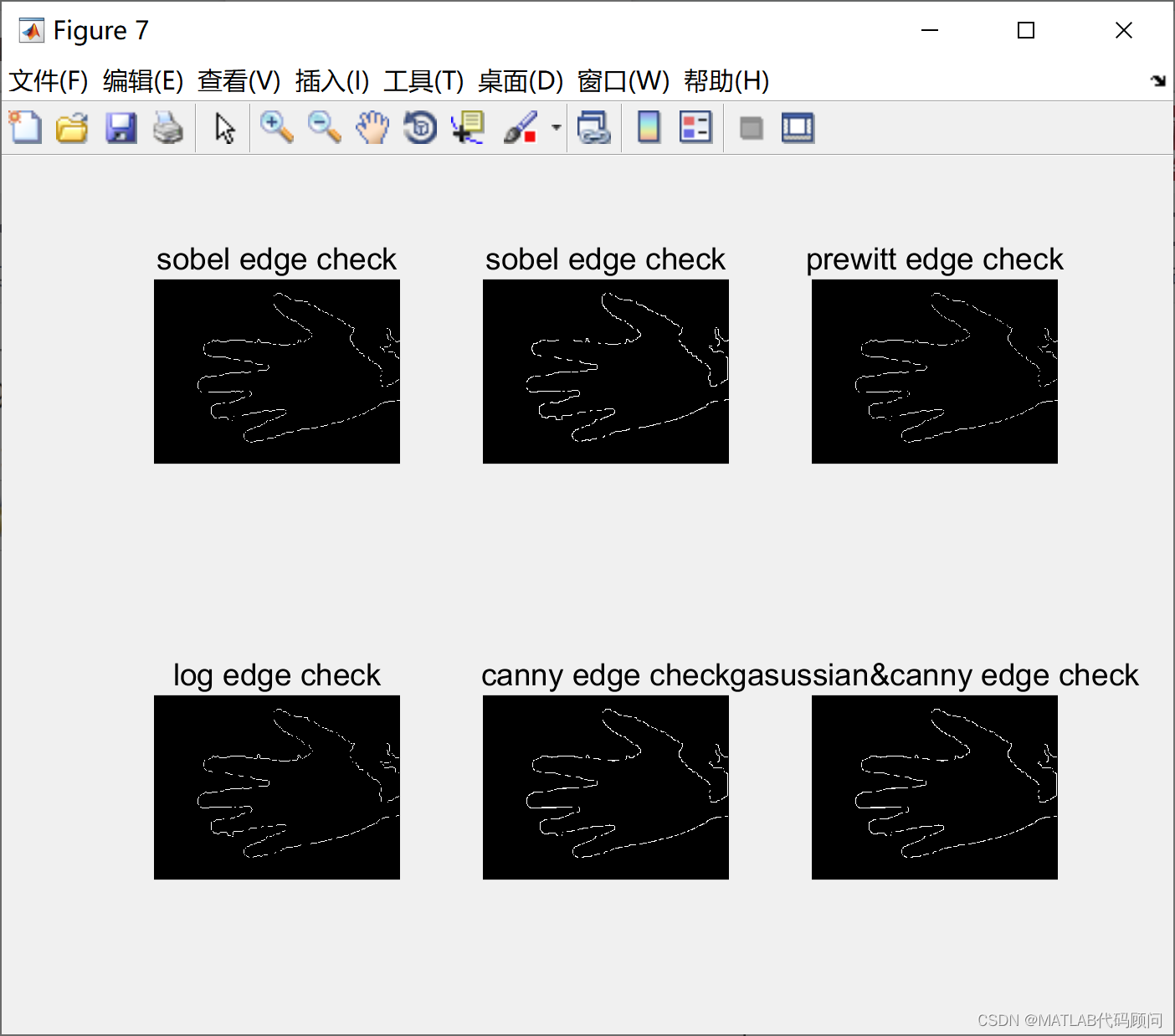
BW1=edge(I,'sobel'); %用SOBEL算子进行边缘检测
BW2=edge(I,'roberts');%用Roberts算子进行边缘检测
BW3=edge(I,'prewitt'); %用prewitt算子进行边缘检测
BW4=edge(I,'log'); %用log算子进行边缘检测
BW5=edge(I,'canny'); %用canny算子进行边缘检测
h=fspecial('gaussian',5);
BW6=edge(I,'canny');
figure;
subplot(2,3,1), imshow(BW1);
title('sobel edge check');
subplot(2,3,2), imshow(BW2);
title('sobel edge check');
subplot(2,3,3), imshow(BW3);
title('prewitt edge check');
subplot(2,3,4), imshow(BW4);
title('log edge check');
subplot(2,3,5), imshow(BW5);
title('canny edge check');
subplot(2,3,6), imshow(BW6);
title('gasussian&canny edge check');%此为用高斯滤波后Canny算子边缘检测结果
r1=im(:,:,1);
b1=im(:,:,2);
g1=im(:,:,3);
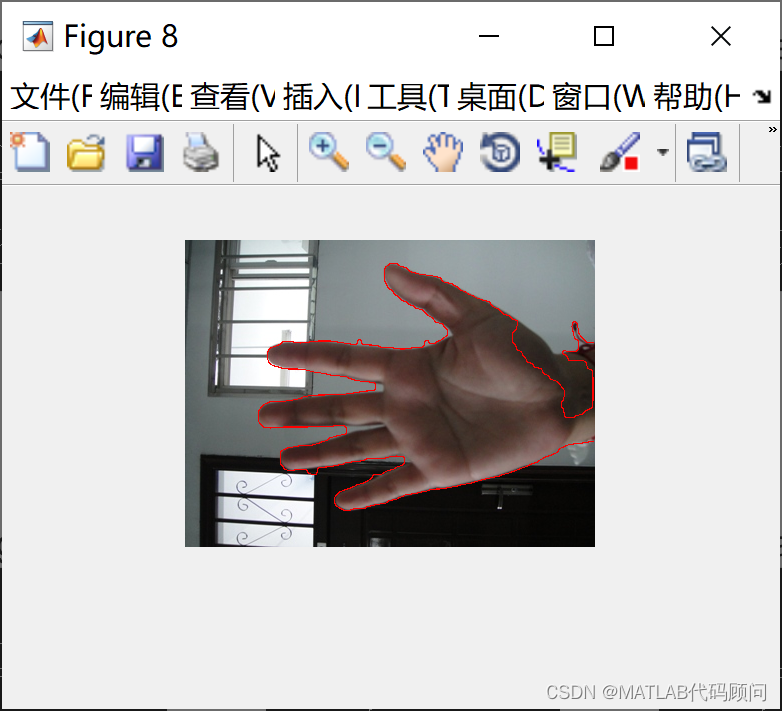
%% 判断边缘
[w1,h1,k43]=size(im);
for i=1:w1
? ? for j=1:h1
? ? ? ? if BW6(i,j)==1%是边缘
? ? ? ? ? ? % 用红色标出边缘
? ? ? ? ? ? r1(i,j)=255;
? ? ? ? ? ? b1(i,j)=0;
? ? ? ? ? ? g1(i,j)=0;
? ? ? ? end
? ? end
end
Iegde=zeros(w1,h1,3);
% 合成彩色图
Iegde(:,:,1)=r1;
Iegde(:,:,2)=b1;
Iegde(:,:,3)=g1;
Iegde=double(Iegde/255);%转换为0-1彩色图
figure;
imshow(Iegde);%绘制识别出来的图
子函数imageclose.m
%执行了先膨后胀腐蚀的闭运算
function I_closed = imageclose(im1)
%I=imread('result.bmp');
se=strel('disk',3);
I_closed=imclose(im1,se);
%subplot(1,2,1);
%imshow(im1);
figure;
imshow(I_closed);
title('闭运算后图像');
%imwrite(I_opened,'result1.bmp');
?
子函数?hand_segmentation.m
function [skin,bwycbcr,w,h] = hand_segmentation(im)
%imgrgb=imread('IMG_2755.jpg');
% im=imread('DSC05818.JPG');
[w h]=size(im(:,:,1));
%Laplacian 八邻域模板滤波
h1=[-1,-1,-1;-1,9,-1;-1,-1,-1];
bw1=imfilter(im,h1);
% bw1=im;
[m,n,c]=size(bw1);
% delete strFile,c;
%将RGB色彩空间转换为Ycbcr色彩空间
imgrgb3=rgb2ycbcr(bw1);
y=imgrgb3(:,:,1);
cb=imgrgb3(:,:,2);
cr=imgrgb3(:,:,3);
%==================================
%在Ycbcr色彩空间中分割肤色区域
cb=double(cb);
cr=double(cr);
y=double(y);
bwycbcr=zeros(m,n);
for i=1:m
? ? for j=1:n
? ? ? ? if y(i,j)<125
? ? ? ? ? ? cb1=108+(125-y(i,j))*10/109;
? ? ? ? ? ? cr1=154-(125-y(i,j))*10/109;
? ? ? ? ? ? wcb=23+(y(i,j)-16)*23.97/109;
? ? ? ? ? ? wcr=20+(y(i,j)-16)*18.76/109;
? ? ? ? ? ? cb1=(cb(i,j)-cb1)*46.97/wcb+cb1;
? ? ? ? ? ? cr1=(cr(i,j)-cr1)*38.76/wcr+cr1;
? ? ? ? elseif y(i,j)>188
? ? ? ? ? ? cb1=108+(y(i,j)-188)*10/47;
? ? ? ? ? ? cr1=154+(y(i,j)-188)*22/47;
? ? ? ? ? ? wcb=14+(235-y(i,j))*32.97/47;
? ? ? ? ? ? wcr=10+(235-y(i,j))*28.76/47;
? ? ? ? ? ? cb1=(cb(i,j)-cb1)*46.97/wcb+cb1;
? ? ? ? ? ? cr1=(cr(i,j)-cr1)*38.76/wcr+cr1;
? ? ? ? else
? ? ? ? ? ? cb1=cb(i,j);
? ? ? ? ? ? cr1=cr(i,j);
? ? ? ? end
? ? ? ? x1=[-0.819 0.574]*[cb1-109.38;cr1-152.02];
? ? ? ? y1=[-0.574 -0.819]*[cb1-109.38;cr1-152.02];
? ? ? ? if (x1-1.60).^2/644.6521+(y1-2.41).^2/196.8409<=1
? ? ? ? ? ? bwycbcr(i,j)=1;
? ? ? ? else bwycbcr(i,j)=0;
? ? ? ? end
? ? end?
end
%strWrite=strcat('a',strFile1);
%imwrite(bwycbcr,strWrite,'jpg');
figure;
%subplot(2,2,1);
imshow(im);
%title('原始图像');
figure;
%subplot(2,2,2);
imshow(bw1);
figure;
%title('Laplacian滤波');
%subplot(2,2,3);
imshow(bwycbcr);?
% figure;
%title('Ycbcr皮肤颜色模型');
%subplot(2,2,4);
%把bwycbcr拉伸到[0,1]
bw2=imadjust(bwycbcr,[0,1]);
skin=bw2;
%去除少像素连通区域
skin=bwareaopen(skin,round(w*h/1000));
% imshow(skin);?
% title('去除少数像素');
%imwrite(skin,'result.bmp');
子函数Datafind_V1.m
function [Cpx_C_fft_new5]=Datafind_V1(im4)
%im5=imread('result4.bmp');
[Y X]=size(im4);
flag=1;
%寻找链码的起始点
for k=1:Y
? ? if flag==0
? ? ? ? break;
? ? end ? ? ? ?
? ? for kk=1:X
? ? ? ? b=im4(k,kk);
? ? ? ? ? if b==1
? ? ? ? ? ? p_x=kk;
? ? ? ? ? ? p_y=k;
? ? ? ? ? ? flag=0;
? ? ? ? ? ? break;
? ? ? ? end
? ? end
end
imagesc(im4);
colormap(gray);
flag=1;
cur_x=p_x;
cur_y=p_y;
chainCode=[p_y p_x];
im_bak=im4;
while flag==1
im4(cur_y,cur_x)=0;
imblock=im4(cur_y-1:cur_y+1,cur_x-1:cur_x+1);
if sum(sum(imblock))==0?
? ? if sum(sum(im4))==0 | abs(cur_x-p_x)+abs(cur_y-p_y)<3
? ? ? ? break;
? ? else
? ? ? ? im_bak(cur_y,cur_x)=0;
? ? ? ? im4=im_bak;
? ? ? ? cur_y=p_y;
? ? ? ? cur_x=p_x;
? ? ? ? chainCode=[];
? ? end
else
[n_y n_x]=findNb(imblock);
tmp=[n_y+cur_y n_x+cur_x];
chainCode=[chainCode; tmp];
cur_y=tmp(1);
cur_x=tmp(2);
end
end
%将链码出的边缘点组成复数点,并做归一化的傅里叶变换
Cpx_C=chainCode(:,1)+chainCode(:,2)*i;
N=length(Cpx_C);
Cpx_C_fft=1/N*fft(Cpx_C);
figure;plot(real(Cpx_C),imag(Cpx_C));
title('链码点plot图片');
Cpx_C_fft_new5=abs(Cpx_C_fft(2:11));
%save data5.mat Cpx_C_fft_new5 ;
%Cpx_C_new=ifft(Cpx_C_fft_new1);
%figure;plot(real(Cpx_C_new),imag(Cpx_C_new));
%BW=10;
%Cpx_C_fft_new=zeros(1,N);
%Cpx_C_fft_new(1:BW+1)=Cpx_C_fft(1:BW+1);
%Cpx_C_fft_new(N-(BW-1):N)=Cpx_C_fft(N-(BW-1):N);
%Cpx_C_new=ifft(Cpx_C_fft_new);
%figure;plot(real(Cpx_C_new),imag(Cpx_C_new));
子函数boundary_trace.m
%function g=boundary_trace(f)
%g=boundary_trace(f)跟踪目标的外边界,f为输入的二值图像,g为输出的二值图像
%此处f g都是认为是二维矩阵 ?【行 ?列】==【y ? x】
%此算法只适用于二值图像
%f=imread('result1.bmp');
%去掉整幅图像四周围的像素点,保证图像目标的连通性
function g=boundary_trace(im2)
[YS,XS]=size(im2);
im2(1,1:XS)=0;
im2(YS,1:XS)=0;
im2(1:YS,1)=0;
im2(1:YS,XS)=0;
f=im2bw(im2);
imshow(im2);
offsetr=[-1,0,1,0];
offsetc=[0,1,0,-1];
next_search_dir_table=[4 1 2 3];%搜索方向查找表
next_dir_table=[2 3 4 1];%搜索顺序查找表
start=-1;
boundary=-2;
%找出起始点
[rv,cv]=find((f(2:end-1,:)>0)&(f(1:end-2,:)==0));
%此处可以简化处理,只用找出一个初始点即可。
rv=rv+1;
startr=rv(1);
startc=cv(1);
f=im2double(f);
f(startr,startc)=start;
cur_p=[startr,startc];
init_dir=-1;
done=0;
next_dir=2; ?%初始搜索方向
flag=1;
while~done
dir=next_dir;
found_neighbour=0;
for i=1:length(offsetr) ? %四邻域上的寻找下一个边缘点
? ? offset=[offsetr(dir),offsetc(dir)];
? ? neighbour=cur_p+offset;
? ? if(f(neighbour(1),neighbour(2)))~=0 ?%找到新的边缘点
? ? ? ? if(f(cur_p(1),cur_p(2))==start)&(init_dir==-1)
? ? ? ? ? ? init_dir=dir; ?%记下离开初始点时的方向
? ? ? ? ? ? %当前点为初始点且新的边缘点的离开方向为初始离开方向,表明跟踪过程已饶了一圈
? ? ? ? elseif(f(cur_p(1),cur_p(2))==start)&(init_dir==dir)
? ? ? ? ? ? done=1;
? ? ? ? ? ? found_neighbour=1;
? ? ? ? ? ? break;
? ? ? ? end
? ? ? ? next_dir=next_search_dir_table(dir); ? %下一个搜索方向
? ? ? ? ? found_neighbour=1;
? ? ? ? ? if f(neighbour(1),neighbour(2))~=start
? ? ? ? ? ? f(neighbour(1),neighbour(2))=boundary;
? ? ? ? ??
? ? ? ? ? end
? ? ? ? ? cur_p=neighbour;
? ? ?
? ? ? ? ? ?break;
? ? ? end
? ? dir=next_dir_table(dir);
end
end
bi=find(f==boundary);
f(:)=0;
f(bi)=1;
f(startr,startc)=1;
g=im2bw(f);
figure,imshow(g);
%title('边缘追踪后图像');
%imwrite(g,'result4.bmp');
%[Y,X]=find(g);
%corr=zeros(2,length(X));
%corr(1,:)=X;
%corr(2,:)=Y;
%frac_dim = boxcount(corr, 10,1);
子函数boundary_thin.m
function i_new1=boundary_thin(im3)
%i=imread('result47.bmp');
%imshow(im3);
%i_new=i>128;
%i_new1=bwmorph(i_new,'thin');2
i_new1=bwmorph(im3,'thin');
figure,imshow(i_new1);
title('细化图像');
%imwrite(i_new1,'result5.bmp');
子函数adjustsize.m
?
function I_new1=adjustsize(im1)
%I=imread('result.bmp');
%找到最左边和最右边灰度值不为1点的横坐标
J=sum(im1);
m=size(im1,2);
for i=1:m
? ? if J(i)~=0
? ? ? ? p=i;
? ? ? ? break;
? ? else?
? ? ? ? continue;
? ? end
end
for j=m:-1:1
? ? if J(j)~=0
? ? ? ? q=j;
? ? ? ? break;
? ? else
? ? ? ? continue;
? ? end
end
%找到最左边和最右边灰度值不为1点的纵坐标
I1=im1';
J1=sum(I1);
n=size(I1,2);
for k=1:n
? ? if J1(k)~=0
? ? ? ? r=k;
? ? ? ? break;
? ? else?
? ? ? ? continue;
? ? end
end
for l=n:-1:1
? ? if J1(l)~=0
? ? ? ? s=l;
? ? ? ? break;
? ? else
? ? ? ? continue;
? ? end
end
%剪切出以坐标点(p,r)和(q,s)组成的矩形区域
I_new=imcrop(im1,[p r q-p s-r]);
%figure,imshow(I_new);
I_new1=imresize(I_new,[150 150]);
figure,imshow(I_new1);
title('调整大小为150*150图像');
? ?程序结果如下:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!