geemap学习笔记047:边缘检测
发布时间:2024年01月15日
前言
边缘检测适用于众多的图像处理任务,除了上一节[[geemap046:线性卷积–低通滤波器和拉普拉斯算子|线性卷积]]中描述的边缘检测核之外,Earth Engine 中还有几种专门的边缘检测算法。其中Canny 边缘检测算法使用四个独立的滤波器来识别对角线、垂直和水平边缘。计算提取水平和垂直方向的一阶导数值并计算梯度幅值, 较小幅度的梯度则会被抑制。
1 导入库并显示地图
import ee
import geemap
ee.Initialize()
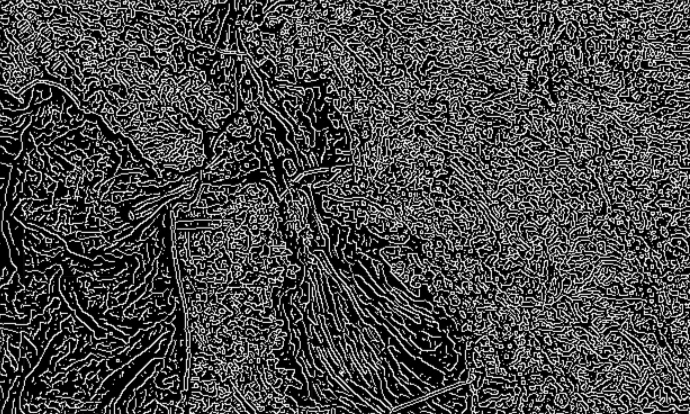
2 Canny边缘检测
为了消除高频噪声,可以选择使用高斯核对图像进行预滤波。‘threshold’ 参数确定最小梯度幅度,而 ‘sigma’ 参数是高斯预滤波器的标准差 (SD),以去除高频噪声。
# Create a map centered at (lat, lon).
Map = geemap.Map(center=[40, -100], zoom=4)
# 加载Landsat 8 影像, 选择全色波段.
image = ee.Image('LANDSAT/LC08/C02/T1/LC08_044034_20140318').select('B8')
Map.addLayer(image, {'max': 12000}, 'image')
# 执行Canny边缘检测并显示结果,非0值表示边缘
canny = ee.Algorithms.CannyEdgeDetector(**{
'image': image, 'threshold': 10, 'sigma': 1
})
Map.setCenter(-122.054, 37.7295, 10)
Map.addLayer(canny, {}, 'canny')
Map
3 Hough 变换
为了从边缘检测器中提取线条,Earth Engine 实现了 Hough 变换,使用以下操作从 Canny 检测器中提取线条:
# 对Canny结果进行Hough变换并显示。
hough = ee.Algorithms.HoughTransform(canny, 256, 600, 100)
Map.addLayer(hough, {}, 'hough')
Map

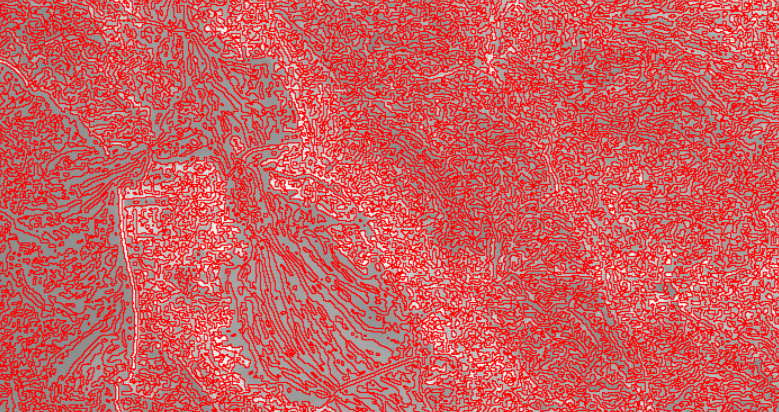
4 zeroCrossing边缘检测
Earth Engine 中的另一个专用算法是 ZeroCrossing()。 zeroCrossing被定义为右侧、底部或对角右下角像素具有相反符号的任何像素。 如果这些像素中的任何一个具有相反的符号,则当前像素设置为 1(zero-crossing); 否则它被设置为零。 为了检测边缘,可以将zero-crossing算法应用于图像二阶导数的估计。
# 定义一个 “fat” 高斯核。
fat = ee.Kernel.gaussian(**{
'radius': 3,
'sigma': 3,
'units': 'pixels',
'normalize': True,
'magnitude': -1
})
# 定义一个 “skinny” 高斯核。
skinny = ee.Kernel.gaussian(**{
'radius': 3,
'sigma': 1,
'units': 'pixels',
'normalize': True,
})
# 计算高斯差分 (difference-of-Gaussians, DOG) 核。
dog = fat.add(skinny)
# 计算二阶导数的零交叉点,并显示
zeroXings = image.convolve(dog).zeroCrossing()
Map.setCenter(-122.054, 37.7295, 10)
Map.addLayer(zeroXings.updateMask(zeroXings), {'palette': 'FF0000'}, 'zero crossings')
Map
后记
大家如果有问题需要交流或者有项目需要合作,可以加Q Q :504156006详聊,加好友请留言“CSDN”,谢谢。
文章来源:https://blog.csdn.net/qq_41951977/article/details/135530979
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 移动硬盘无法读取怎么回事?
- 多线程对全局Map做computeIfAbsent()引发的线程问题
- jar包热加载原理
- MYSQL06高级_为什么使用索引、优缺点、索引的设计、方案、聚簇索引、联合索引、注意事项
- EM(Expectation-Maximum)算法
- ssm基于vue的视频播放器的设计与实现+vue论文
- centos8stream 升级 sqlite3 ,解决 SQLite 3.27 or later is required (found 3.26.0).
- 读懂报表寻找十倍牛股,财报分析之应收账款
- 计算机网络(超详解!) 第二节 数据链路层(上)
- 什么是RS485接口?