PCL点云匹配 3 之 Point-to-Plane ICP
发布时间:2023年12月20日
一、概述
已经证明 Point -to-Plane 算法已经比Point-to-Point 的误差都要快更准确一些,在 ICP 算法的每次选代中,产生最小点到平面误差的相对位姿变化通常使用标准的非线性最小二乘法来解决。例如 Levenberg-Marquardt方法。当使用点到平面误差度量时,最小化的对象是每个源点与其对应目标点的切平面之间的平方距离之和。
二、原理介绍
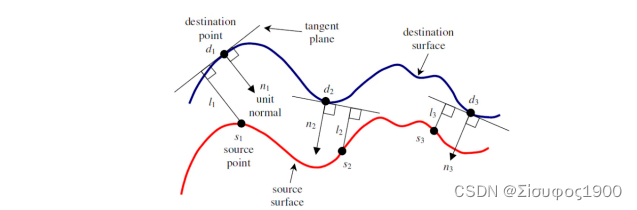
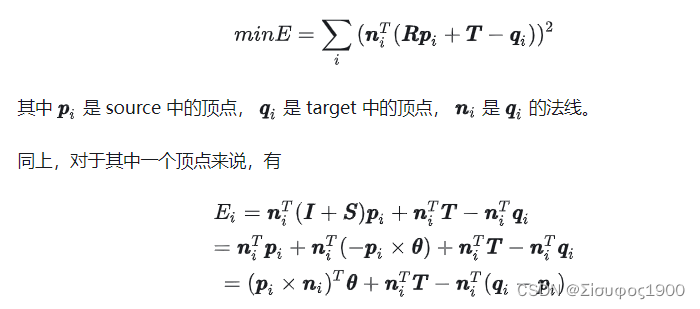
那么我们可以计算间距最小函数,即loss 函数
? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
参数注释:
? ? ? ? ?R:表示的是旋转矩阵
? ? ? ? ?T:表示的是 平移矩阵
? ? ? ? ?Pi: 表示的是soruce 点云
? ? ? ? ?Qi:表示的是target 点云
? ? ? ? ?Ni:表示的是target点云该点对于的法向量
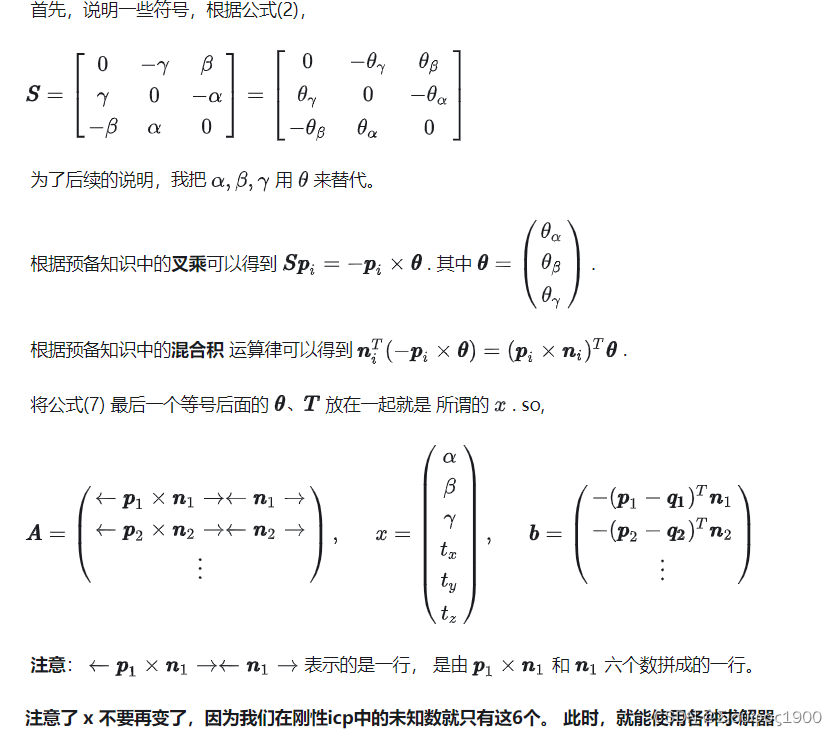
?推导:
点云配准: 刚性ICP中 Point-to-Point 和 Point-to-Plane 公式推导 ==> 帮助你代码实现 - 知乎
准备1?
?
? ? ? ? ? ? ? ? ? ? ?
?
?
点云刚性配准:point2point 和 point2plane 代码 - 知乎
void ICP::point2plane(float weight, Eigen::MatrixXf& A, Eigen::VectorXf& b)
{
A.resize(m_srcOfPair.size(), 6);
b.resize(m_srcOfPair.size());
for (int j = 0; j < m_srcOfPair.size(); j++)
{
Eigen::Vector3f sourceCoordinates;
sourceCoordinates = m_srcOfPair[j];
Eigen::Vector3f targetCoordinates;
targetCoordinates = m_targetOfPair[j];
Eigen::Vector3f targetNormal;
targetNormal = m_targetNormalsOfPair[j];
//两个向量的叉乘结果是一个向量(三个数)
Eigen::Vector3f sourceMultiplyNormal;
sourceMultiplyNormal = sourceCoordinates.cross(targetNormal);
A(j, 0) = sourceMultiplyNormal[0];
A(j, 1) = sourceMultiplyNormal[1];
A(j, 2) = sourceMultiplyNormal[2];
A(j, 3) = targetNormal[0];
A(j, 4) = targetNormal[1];
A(j, 5) = targetNormal[2];
b[j] = -(((sourceCoordinates - targetCoordinates).transpose()).dot(targetNormal));
}
A *= weight;
b *= weight;
}? ? ? ? ? ? ? ? ? ? ? ? ? ??
文章来源:https://blog.csdn.net/weixin_39354845/article/details/135109096
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【SpringBoot】日期格式化
- python渗透工具编写学习笔记:8、无线网络渗透
- slice-uploader切片上传
- 注册中心与服务发现环境搭建实例--Eureka和Nacos
- 【Linux】修改Linux远程登录用户并授权,禁止root远程登录,修改Linux登录端口
- 码蹄集新手村MT1001程序设计入门MT1002输入和输出整型数据MT1003整数运算MT1006实型数运算MT1007平均分MT1008圆球等的相关计算MT1009公式计算MT1010输入和输出字符
- pyfolio工具结合backtrader分析量化策略组合,附源码+问题分析
- 陶瓷碗口缺口检测-技术方案
- Linux系统LVS-DR模式群集
- MongoDB与大数据处理:构建高性能分布式数据库