STM32TIM定时器PWM输出比较(适用于通用,高级定时器)
前言
在定时器中我们最常用的功能就是输出PWM,大多是用在电机控制方面,目前网络上相关资料也有很多,但是,很多不利于我们“现搜现用”我这里不是说我写的有多好,而是你搜索到此类文章时大部分是急于解决目前的问题,一段相关代码和讲解就行,当然不是学习背后的原理不重要,而是你可以自由选择当前学习方式。
结构略讲
? 输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形。就是上面的这句话。它可以用于实现电机控速、舵机控制、LED呼吸灯等应用。

想了一下结构还是要配图进行讲解,PWM输出有多种模式,这里我用的最常用的?PWM模式。我们需要配置我上面标的红黄蓝,这三个部分的结构,当然我会对PWM模式进行分类更好的让我们理解,如以下,按照不同功能有一些变动。
1.单路输出比较
顾名思义就是一个通道输出PWM方波。按照下面的流程
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APBXPeriphClockCmd(RCC_APB2Periph_GPIOX, ENABLE);
//上面X的地方选择自己要求的定时器端口和总线
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_X;
//上面X的地方选择自己要求的端口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOX, &GPIO_InitStructure);
//X同上
GENERAL_TIM_APBxClock_FUN(GENERAL_TIM_CLK,ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period=a+1;
// 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Prescaler= b+1;
// 时钟分频因子 ,配置死区时间时需要用到
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
// 初始化定时器
TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);

TIM_OCInitTypeDef TIM_OCInitStructure;
// 配置为PWM模式1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//我上面是向上计数输出所以CNT<CCR时有效配置此时输出为高电平
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_Pulse = c ;
TIM_OC1Init(TIMX, &TIM_OCInitStructure);//选择通道1并且把上述参数传递进去。
TIM_OC1PreloadConfig(TIMX, TIM_OCPreload_Enable);? ? ? ? ? ? ? ? ? ? ? ? ??
2两路互补输出带死区时间
这部分和单路有很多相同部分前期准备工作
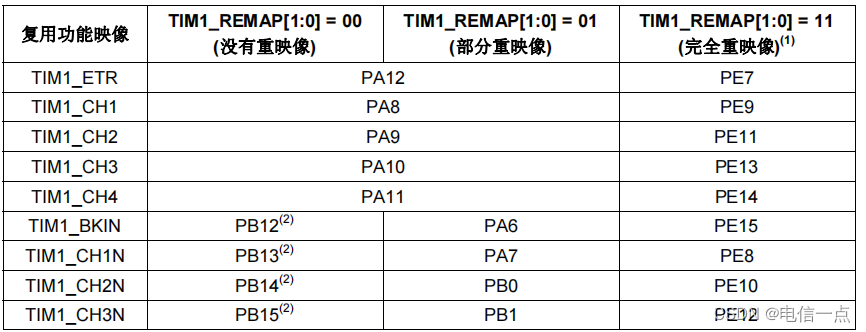
我们可以看到上面比如PA8和PB13互为互补所以它们可以用来做互补输出。就是比上面多了一部分,和改了一点

(1) 定时器用到的 GPIO 初始化
GPIO_InitTypeDef GPIO_InitStructure;
// 输出比较通道 GPIO 初始化
RCC_APB2PeriphClockCmd(, ENABLE);
GPIO_InitStructure.GPIO_Pin = ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(ADVANCE_TIM_CH1_PORT, &GPIO_InitStructure);
// 输出比较通道互补通道 GPIO 初始化
RCC_APB2PeriphClockCmd(, ENABLE);
GPIO_InitStructure.GPIO_Pin = ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(ADVANCE_TIM_CH1N_PORT, &GPIO_InitStructure);
// 输出比较通道刹车通道 GPIO 初始化
RCC_APB2PeriphClockCmd(, ENABLE);
GPIO_InitStructure.GPIO_Pin = ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(ADVANCE_TIM_BKIN_PORT, &GPIO_InitStructure);
// BKIN引脚默认先输出低电平
GPIO_ResetBits(,);
}(2) 定时器时基结构体 TIM_TimeBaseInitTypeDef 初始化
这里同上不重复写
(3) 定时器输出比较结构体TIM_OCInitTypeDef 初始化
TIM_OCInitTypeDef TIM_OCInitStructure;
// 配置为PWM模式1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
// 输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
// 互补输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
// 设置占空比大小
TIM_OCInitStructure.TIM_Pulse =;
// 输出通道电平极性配置
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// 互补输出通道电平极性配置
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
// 输出通道空闲电平极性配置
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
// 互补输出通道空闲电平极性配置
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC1Init(, &TIM_OCInitStructure);
TIM_OC1PreloadConfig, TIM_OCPreload_Enable);
(4) 定时器刹车和死区结构体 TIM_BDTRInitTypeDef 初始化
// 有关刹车和死区结构体的成员具体可参考BDTR寄存器的描述
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1;
// 输出比较信号死区时间配置,具体如何计算可参考 BDTR:UTG[7:0]的描述
// 这里配置的死区时间为152ns
TIM_BDTRInitStructure.TIM_DeadTime = 11;
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable;
// 当BKIN引脚检测到高电平的时候,输出比较信号被禁止,就好像是刹车一样
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;
TIM_BDTRConfig(, &TIM_BDTRInitStructure);
// 使能计数器
TIM_Cmd(, ENABLE);
// 主输出使能,当使用的是通用定时器时,这句不需要
TIM_CtrlPWMOutputs(, ENABLE);
TIM_OSSRState:输出空闲状态选择,用于设置当定时器处于空闲状态时,是否保持输出的最后状态,还是强制输出为预设的空闲状态。它设定BDTR寄存器的OSSR位的值。
TIM_OSSIState:输出空闲状态使能,用于设置当定时器处于空闲状态时,是否关闭输出的空闲状态选择功能,以节省功耗。它设定BDTR寄存器的OSSI位的值。
TIM_LOCKLevel:锁定配置,用于设置定时器的锁定级别,防止意外修改定时器的配置。它设定BDTR寄存器的LOCK [1:0]位的值。
TIM_DeadTime:死区时间,用于设置定时器的死区发生器的延时时间,防止输出通道和互补输出通道同时有效,造成短路。它设定BDTR寄存器的DTG [7:0]位的值。
TIM_Break:刹车功能使能,用于设置是否启用定时器的刹车功能,当刹车输入信号有效时,关闭定时器的输出。它设定BDTR寄存器的BKE位的值。
TIM_BreakPolarity:刹车输入极性,用于设置定时器的刹车输入信号的有效电平是高还是低。它设定BDTR寄存器的BKP位的值。
TIM_AutomaticOutput:自动输出使能,用于设置是否启用定时器的自动输出功能,当定时器处于空闲状态时,自动恢复输出。它设定BDTR寄存器的AOE位的值。
这部分确实比较难,可以以后慢慢理解
?结语:
??在本文中,我们介绍了STM32TIM定时器输出比较功能的原理和应用,包括输出比较的电路结构、输出模式的选择、PWM波形的产生和计算。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Excel中快速隐藏中间四位手机号或者身份证号等
- Git分支合并操作指南
- 视觉学习(1)—— 理论
- SpringBoot--入门使用
- linux文件系统 - 初始化(一)
- 一刀切转为精细化,门店如何进行「体检式」巡查(一)
- Vue3中的`ref`和`reactive使用中遇到的一些坑
- STM32的以太网外设+PHY(LAN8720)使用详解(5):MAC及DMA配置
- 【Android】细数Linux和Android系统中的伪文件系统
- 美易官方:开盘:美股高开科技股领涨 标普指数创盘中新高