ROS2——INFO、Rate和spin_some
发布时间:2024年01月13日
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("logger_node");
rclcpp::Rate loop_rate(500ms);
int counter = 0;
while (rclcpp::ok()) {
RCLCPP_INFO(node->get_logger(), "Hello %d", counter++);
rclcpp::spin_some(node);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
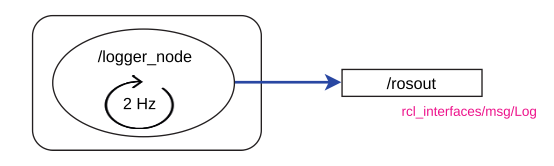
rclcpp::Rate可以控制循环的速度,当前面的程序执行完后,可以外加适当的延迟以达到我们选择的速度500msrclcpp::spin_some立刻处理回调,没有任务后结束该指令,与spin不同,spin在没有指令的情况下会使代码停滞运行,直到有新命令为止RCLCPP_INFO可以类比于printf,可以将信息打印出来,并发布到话题/rosout上get_logger()可以获得要记录的节点对象,直接在节点创建的时候就建立的logger对象,有默认的名字,get_node_logger(const rcl_node_t * node);给我一个名字,如果不存在,我给你创建一个日志记录器对象,存在则返回对应的对象
编译并运行后,可以得到如下结果,可以看到消息的类型,节点的名字以及时间、发布的内容
tao@tao-virtual-machine:~/Documents/bookros_ws$ ros2 run br2_basics logger
[INFO] [1683337358.786960921] [logger_node]: Hello 0
[INFO] [1683337359.287385198] [logger_node]: Hello 1
/logger_node 发布了类型为 rcl_interfaces/msg/Log 的信息到话题 /rosout 中
使用该命令可以查看该话题的相关信息
ros2 topic echo /rosout
stamp:
sec: 1683338436
nanosec: 287431041
level: 20
name: logger_node
msg: Hello 2155
file: /home/tao/Documents/bookros_ws/src/br2_basics/src/logger.cpp
function: main
line: 47
---
stamp:
sec: 1683338436
nanosec: 787051397
level: 20
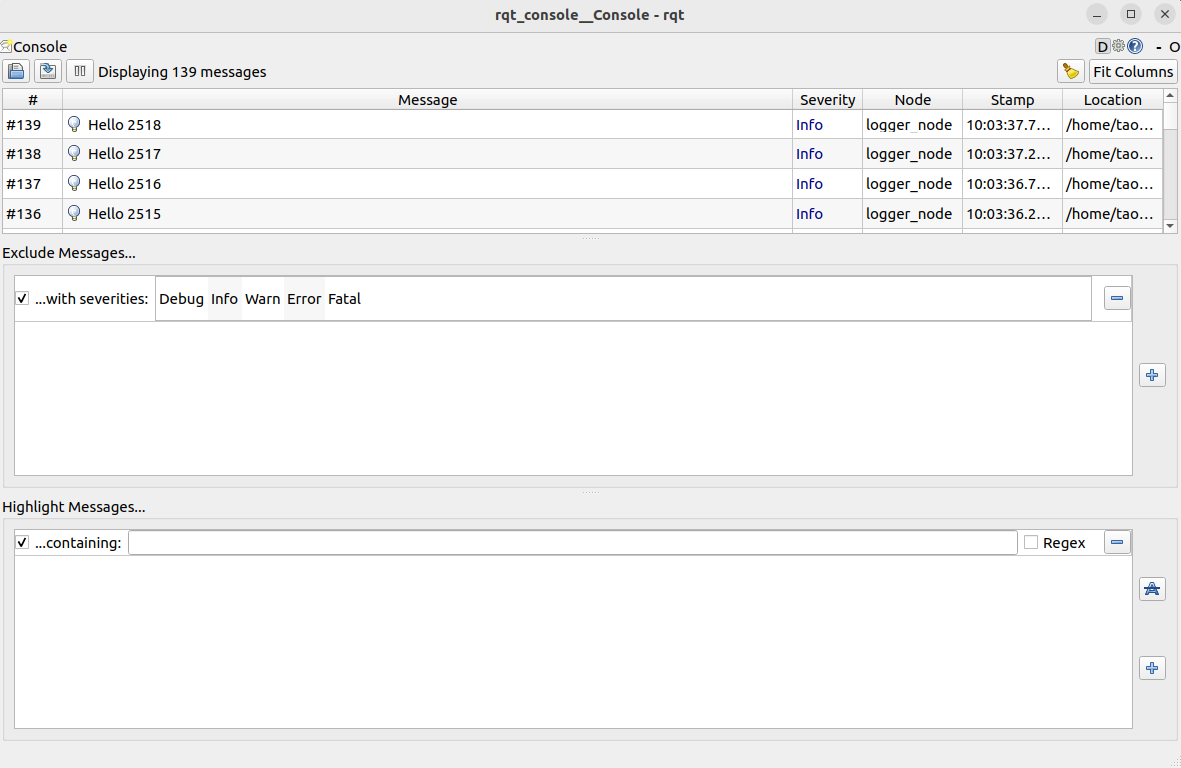
接下来我们启动一个节点,来订阅节点 logger_node 通过话题 rosout 发布的消息
ros2 run rqt_console rqt_console
使用面向对象编程,使用类继承 rclcpp::Node 的内容,这样代码更简洁明了
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
class LoggerNode : public rclcpp::Node
{
public:
LoggerNode()
: Node("logger_node")
{
counter_ = 0;
timer_ = create_wall_timer(
500ms, std::bind(&LoggerNode::timer_callback, this));
}
void timer_callback()
{
RCLCPP_INFO(get_logger(), "Hello %d", counter_++);
}
private:
rclcpp::TimerBase::SharedPtr timer_;
int counter_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<LoggerNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
tao@tao-virtual-machine:~/Documents/bookros_ws$ ros2 run br2_basics logger_class
[INFO] [1683377550.915089556] [logger_node]: Hello 0
[INFO] [1683377551.415162220] [logger_node]: Hello 1
[INFO] [1683377551.914849522] [logger_node]: Hello 2
[INFO] [1683377552.415050848] [logger_node]: Hello 3
[INFO] [1683377552.915133830] [logger_node]: Hello 4
[INFO] [1683377553.415104382] [logger_node]: Hello 5
[INFO] [1683377553.914778350] [logger_node]: Hello 6
通过继承 rclcpp:Node ,创建一个名为 LoggerNode 的类,并进行命名
创建一个 TimerBase::SharedPtr 的 timer_ , 用以接受 create_wall_timer 回传的变量
create_wall_timer用来创建一个延迟函数,时间设置为500ms,并调用回调函数 timer_callback 打印信息
文章来源:https://blog.csdn.net/beiketaoerge/article/details/135563918
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Android 在UploadEventService使用ThreadPoolManager线程管理传递数据给后台
- 二分查找
- Java8的Stream最佳实践
- 算法题Python常用内置函数、方法、技巧汇总(其二:哈希表)
- 冷链温湿度监控解决方案,实时监测,助力运输安全
- OfficeWeb365 Indexs 任意文件读取漏洞复现
- YOLOv8独家改进:IoU系列篇 | Focaler-IoU???????更加聚焦的IoU损失Focaler-IoU |2024年最新发表
- 0.2费率微信商户号申请开通
- 《教育界》期刊怎么投稿发表论文?
- 新版MQL语言程序设计:用vscode编写编译调试mt4和mt5程序