1223西站坐标更新
发布时间:2023年12月23日
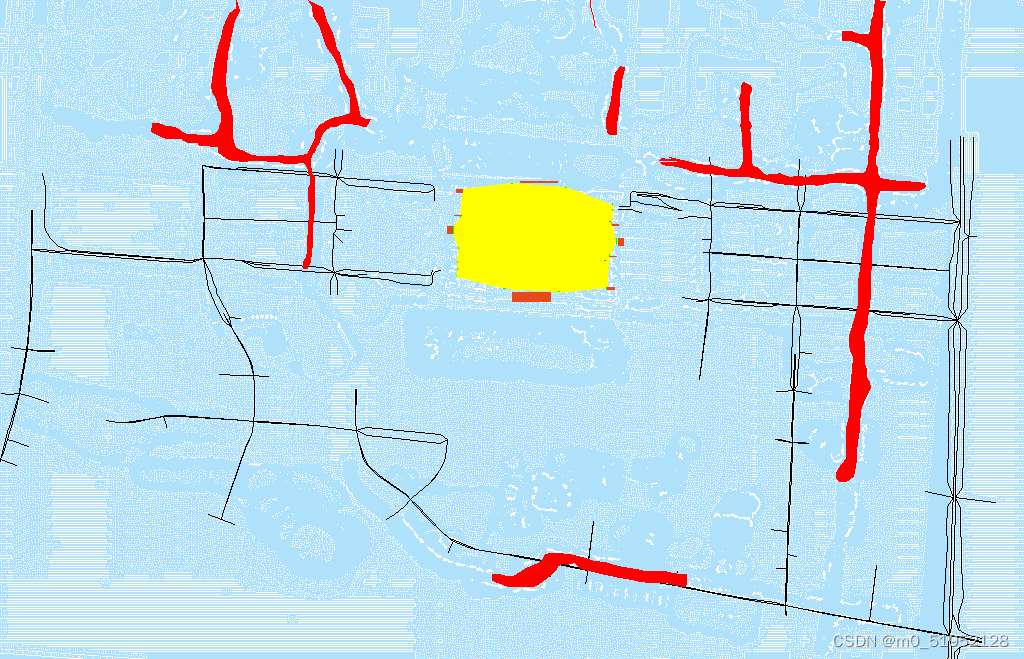
1223 西站坐标更新
1.Update for the station’s location
def initial_out_map_indoor_points(self):
'''
Load the indoor data and update both the wall_matrix and the ditch_matrix.
'''
# Initialize the wall_matrix
# List of coordinates
coordinates = [
(417, 287, 417, 290),
(414, 254, 414, 257),
(412, 222, 412, 225),
(411, 209, 411, 211),
(411, 203, 411, 205),
(567, 275, 567, 276),
(566, 268, 566, 270),
(566, 261, 566, 263),
(565, 247, 565, 249),
(563, 215, 563, 218),
(561, 189, 561, 192),
(407, 238, 407, 245),
(570, 226, 570, 234),
(464, 291, 466, 292),
(518, 288, 521, 288),
(457, 187, 459, 187),
(511, 183, 513, 183)
]
coordinates = self.sort_segments_clockwise(coordinates)
last_pointx,last_pointy=0,0
temp_no=0
# Fill in the wall_matrix
for x1, y1, x2, y2 in coordinates:
# apply the process of wall's calculation
points = bresenham_line(x1, y1, x2, y2) # find all the points within the straight line
for x, y in points:
if 0 <= x < len(self.wall_matrix) and 0 <= y < len(
self.wall_matrix[0]):
self.wall_matrix[int(x), int(y)] = 1 # Remember the location of the wall.
if temp_no>=1 and calculate_distance(last_pointx,last_pointy,x1,y1)<=1000:
points=bresenham_line(last_pointx,last_pointy,x1,y1)
for x, y in points:
if 0 <= x < len(self.wall_matrix) and 0 <= y < len(
self.wall_matrix[0]):
self.wall_matrix[int(x), int(y)] = 1 # Remember the location of the wall.
# if calculate_distance(last_pointx,last_pointy,x1,y1)>100:
# print(f'Out of range:(x1:{x},y1:{y})')
temp_no=temp_no+1
last_pointx,last_pointy=x2,y2
begin_x1,begin_y1,begin_x2,begin_y2=coordinates[0]
print(f'begin_x1:{begin_x1},begin_y1:{begin_y1},begin_x2:{begin_x2},begin_y2:{begin_y2}')
points = bresenham_line(begin_x1, begin_y1, x2, y2) # find all the points within the straight line
for x, y in points:
if 0 <= x < len(self.wall_matrix) and 0 <= y < len(
self.wall_matrix[0]):
self.wall_matrix[int(x), int(y)] = 1 # Remember the location of the wall.
self.wall_matrix = self.fill_area(self.wall_matrix, target_value=1)
# Update the location to the overall matrix
self.outdoor_label[self.wall_matrix == 1] = 1
df=pd.DataFrame(self.wall_matrix)
df.to_csv('G:/HZXZ/Hws-Mirror-City/water_indoor/Model2_data/outdoor_data/temp_data/wall_matrix.csv', index=False)
# label the location of the door
current_dir = os.path.dirname(os.path.abspath(__file__))
data_path = os.path.join(current_dir, 'Model2_data/outdoor_data/out_in_map_points.xlsx')
data = pd.read_excel(data_path)
for _, row in data.iterrows():
# load the door coordinates and finish the transfer
id, x1, y1, x2, y2 = row['id'], row['x1'], row['y1'], row['x2'], row['y2']
x1, y1 = self.indoor_transfer.cad2ue(x1, y1)
x2, y2 = self.indoor_transfer.cad2ue(x2, y2)
index_x1, index_y1 = self.outdoor_transer.ue2index_model2(x1, y1,self.scaled_width,self.scaled_height)
index_x2, index_y2 = self.outdoor_transer.ue2index_model2(x2, y2,self.scaled_width,self.scaled_height)
index_x1, index_y1, index_x2, index_y2 = int(index_x1), int(index_y1), int(index_x2), int(index_y2)
if index_y1 > index_y2:
tmp = index_y1
index_y1 = index_y2
index_y2 = tmp
# print(f'x1:{index_x1}, x2:{index_x2}, y1:{index_y1}, y2:{index_y2}')
# label the location of the indoor doors
if index_x1 == index_x2:
self.outdoor_label[index_x1, index_y1:index_y2] = 5
elif index_y1 == index_y2:
self.outdoor_label[index_x1:index_x2, index_y1] = 5
else:
self.outdoor_label[index_x1:index_x2, index_y1:index_y2] = 5
# self.wall_matrix = self.fill_area(self.wall_matrix, target_value=1) # fill the circled area
新增函数
def calculate_midpoint(self,segment):
return ((segment[0] + segment[2]) / 2, (segment[1] + segment[3]) / 2)
def calculate_centroid(self,segments):
x_sum, y_sum = 0, 0
for segment in segments:
midpoint = self.calculate_midpoint(segment)
x_sum += midpoint[0]
y_sum += midpoint[1]
return x_sum / len(segments), y_sum / len(segments)
def calculate_angle(self,centroid, point):
return math.atan2(point[1] - centroid[1], point[0] - centroid[0])
def sort_segments_clockwise(self,segments):
centroid = self.calculate_centroid(segments)
return sorted(segments, key=lambda segment: self.calculate_angle(centroid, self.calculate_midpoint(segment)))
更细的函数
def showOutdoorImg(self, outdoor_acc_water_matrix):
"""
opencv可视化降雨量矩阵结果
input: rainfall_matrix
output: null
"""
# 获取矩阵中的最大值和对应的下标
max_value = np.max(outdoor_acc_water_matrix)
max_index = np.argmax(outdoor_acc_water_matrix)
# 将一维下标转换为二维下标
max_index_2d = np.unravel_index(max_index, outdoor_acc_water_matrix.shape)
print(f'the largest water logging is {max_value}, the index is {max_index_2d}')
mat = np.transpose(np.copy(outdoor_acc_water_matrix))[::-1]
# 归一化矩阵
# mat = cv2.normalize(mat, None, 200, 250, cv2.NORM_MINMAX, dtype=cv2.CV_8UC3)
mat = mat / 300 * 250
mat[mat > 250] = 250
mat[mat < 30] = 30
mat = mat.astype(np.uint8)
mat = cv2.cvtColor(mat, cv2.COLOR_RGB2BGR)
# 自定义颜色映射表
custom_colormap = create_custom_colormap()
# 将矩阵映射到蓝色色域
image = cv2.applyColorMap(mat, custom_colormap)
label = np.transpose(self.outdoor_label)[::-1]
outdoor_acc_water_matrix = np.transpose(outdoor_acc_water_matrix)[::-1]
image[outdoor_acc_water_matrix < 2] = [255, 255, 255] # 积水为0设置为白色
image[label == 1] = [0,255,255] # 墙体设置为黄色
image[label == 2] = 0 # 路面设置为黑色
image[label == 3] = [0, 0, 255] # 河流部分设置为(30,144,255)
image[label == 5] = [0, 255, 0] # 河流部分设置为(30,144,255)
# image[label == 4] = [0, 255, 0]
image[label == 9] = [25, 74, 230]
image = cv2.resize(image, None, None, 1, 1, cv2.INTER_NEAREST)
# 插入西站图片
# west_station_img = cv2.imread('Model2_data/outdoor_data/west_station.png')
# x, y = int(108*self.resize_scale), int(54*self.resize_scale)
# west_station_img = cv2.resize(west_station_img, None, None, self.resize_scale, self.resize_scale, cv2.INTER_NEAREST)
# image[y:y + west_station_img.shape[0], x:x + west_station_img.shape[1]] = west_station_img
cv2.imwrite(f'result/outdoor_imgs/time_stamp{self.time_stamp}.png', image)
cv2.imwrite(f'Model2_data/outdoor_data/temp_data/time_stamp{self.time_stamp}.png', image)
if self.__debug_mode:
# 显示图像
cv2.imshow("OutdoorImage", image)
cv2.waitKey(500)
# cv2.destroyAllWindows()
def initialMatrix(self):
'''
水体系统,初步生成室外降水 渗透 地势三个matrix
0.土壤
1.墙体
2.道路
3.河流
4.沟渠
5.室内外映射点位
9.易涝点
初步生成室内地势matrix
1.ditch
2.wall
3.Stair
4.RoadStair
'''
# 初始化outdoor_label矩阵
soil_label = 0
walls_label = 1
roads_label = 2
river_label = 3
ditch_label = 4
infinite = np.inf # 设置较大的值代表河流的渗透是无穷的
infiltration_standard = 2 # 渗透量国标
# 初始化地势图中各处的高度
walls_height = np.inf
roads_height = 0
river_height = -1
ditch_height = -10
# 室内初始化
self.indoor_topographic_matrix[self.indoor_label == 1] = ditch_height
self.indoor_topographic_matrix[self.indoor_label == 2] = infinite
# path = 'Model2_data/outdoor_data/'
# np.save(path+'road_matrix_test.npy', self.road_matrix)
# road_matrix = np.load(path+'road_matrix_test.npy')
# 室外初始化
# 对标签矩阵作转换,转换到UE矩阵中去
# self.wall_matrix = self.outdoor_transer.four_point_transform(self.wall_matrix)
# self.river_matrix = self.outdoor_transer.four_point_transform(self.river_matrix)
# self.ditch_matrix = self.outdoor_transer.four_point_transform(self.ditch_matrix)
# self.road_matrix = self.outdoor_transer.four_point_transform(self.road_matrix)
# 初始化降雨矩阵
soil_mask = (self.wall_matrix == 0) & (self.road_matrix == 0) & (self.river_matrix == 0) & (self.ditch_matrix == 0)
self.rainfall_matrix[self.wall_matrix == 1] = 0
self.rainfall_matrix[self.wall_matrix == 0] = 1
# UE转为地势矩阵&初始化特殊地势矩阵
self.initial_topographic_matrix()
# print(f'topographic_matrix non zero points num is {np.count_nonzero(self.outdoor_topographic_matrix)}')
self.outdoor_topographic_matrix[self.wall_matrix == 1] = walls_height
# self.outdoor_topographic_matrix[self.road_matrix == 1] = roads_height
# self.outdoor_topographic_matrix[self.river_matrix == 1] = river_height
self.outdoor_topographic_matrix[self.ditch_matrix == 1] = ditch_height
# 西站坐标初始化
# random_values = np.random.randint(-10, 10, size=np.count_nonzero(soil_mask))
# self.outdoor_topographic_matrix[soil_mask] = random_values
# 初始化标签
self.outdoor_label[soil_mask] = soil_label
# Updated way of labeling both the station and the ditch
self.initial_out_map_indoor_points()
self.outdoor_label[self.road_matrix == 1] = roads_label
# self.outdoor_label[self.river_matrix == 1] = river_label
self.outdoor_label[self.ditch_matrix == 1] = ditch_label
# self.outdoor_label[self.wall_matrix == 1] = walls_label
# Realize this function.
self.initial_river()
df=pd.DataFrame(self.outdoor_label)
df.to_csv('G:/HZXZ/Hws-Mirror-City/water_indoor/Model2_data/outdoor_data/temp_data/outdoor_label.csv', index=False)
print(f'temporary numbers: {np.unique(self.outdoor_label)}')
self.initial_prone_waterlogging_points()
# 室内外映射点位初始化
# for index in range(len(self.outdoor_map_indoor) // 2):
# for (i, j) in self.outdoor_map_indoor[f'outdoor_point{index + 1}']:
# self.outdoor_topographic_matrix[i][j] = 0
# self.outdoor_label[i][j] = 5
pass
Final Output
文章来源:https://blog.csdn.net/m0_51952128/article/details/135175894
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- vue 中 watch 、computed、 watchEffect 区别
- Ubuntu修改用户名和samba目录
- 机器人创新实验室任务三参考文档
- [足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-1 坐标系与概念基准
- Linux操作系统基础(二)系统的基础设置
- 【机器学习】实验记录工具
- 哪些算法可以用于文字识别?
- vue3+elementplus点击按钮使用el-image-viewer图片预览组件
- 【Spring Boot 3】【Redis】集成Redisson
- JAVA商城源码_多用户商城系统源码_B2B2C商基于微服务架构的企业级商城系统、满足高并发、高安全的企业级要求