基于深度学习的垃圾检测与分类系统(含UI界面、yolov5、Python代码、数据集)


项目介绍
项目中所用到的算法模型和数据集等信息如下:
算法模型:
? ? yolov5
? ? yolov5主要包含以下几种创新:
? ? ? ? 1. 添加注意力机制(SE、CBAM、CA等)
? ? ? ? 2. 修改可变形卷积(DySnake-主干c3替换、DySnake-所有c3替换)
数据集:
? ? 网上下载的数据集,大约5000张左右,详细介绍见数据集介绍部分。
以上是本套代码的整体算法架构和对目标检测模型的修改说明,这些模型修改可以为您的 毕设、作业等提供创新点和增强模型性能的功能 。
如果要是需要更换其他的检测模型,请私信。
注:本项目提供所用到的所有资源,包含 环境安装包、训练代码、测试代码、数据集、视频文件、 界面UI文件等。
项目简介
在本文中,我们将详细介绍如何利用深度学习中的YOLOv5算法来实现对垃圾的检测和分类,并结合PyQt5设计了一个简约而强大的系统UI界面。通过该界面,您可以轻松选择自己的视频文件或图片文件进行检测,并且还能够根据需要替换训练好的yolov5模型,以适应不同的数据检测需求。
我们的系统界面不仅外观优美,而且具备出色的检测精度和强大的功能。它支持多目标实时检测,并允许您自由选择感兴趣的检测目标。
本博文提供了完整的Python程序代码和使用教程,非常适合新入门者参考学习。您可以通过文末的下载链接获取完整的代码资源文件。以下是本博文的目录大致内容:
目录
效果展示:
功能:
1. 支持单张图片识别
2. 支持遍历文件夹识别
3. 支持识别视频文件
4. 支持结果导出(xls、csv两种格式)
5. 支持切换检测到的目标
🌟一、环境安装
本项目提供所有需要的环境安装包(python、pycharm、cuda、torch等),可以直接按照视频讲解进行安装。具体的安装流程见此视频:视频链接
环境安装视频是以车牌项目为例进行讲解的,但是可以适用于任何项目。
视频快进到 3:18 - 21:17,这段时间讲解的是环境安装,可直接快进到此处观看。
环境安装包可通过百度网盘下载:
链接:https://pan.baidu.com/s/17SZHeVZrpXsi513D-6KmQw?pwd=a0gi
提取码:a0gi
–来自百度网盘超级会员V6的分享
上面这个方法,是比较便捷的安装方式(省去了安装细节),按照我的视频步骤和提供的安装包安装即可,如果要是想要多学一点东西,可以按照下面的安装方式走一遍,会更加熟悉。
环境安装方法2:
追求快速安装环境的,只看上面即可!!!
下面列出了5个步骤,是完全从0开始安装(可以理解为是一台新电脑,没有任何环境),如果某些步骤已经安装过的可以跳过。下面的安装步骤带有详细的视频讲解和参考博客,一步一步来即可。另外视频中讲解的安装方法是通用的,可用于任何项目。
按照上面的步骤安装完环境后,就可以直接运行程序,看到效果了。
🌟二、数据集介绍
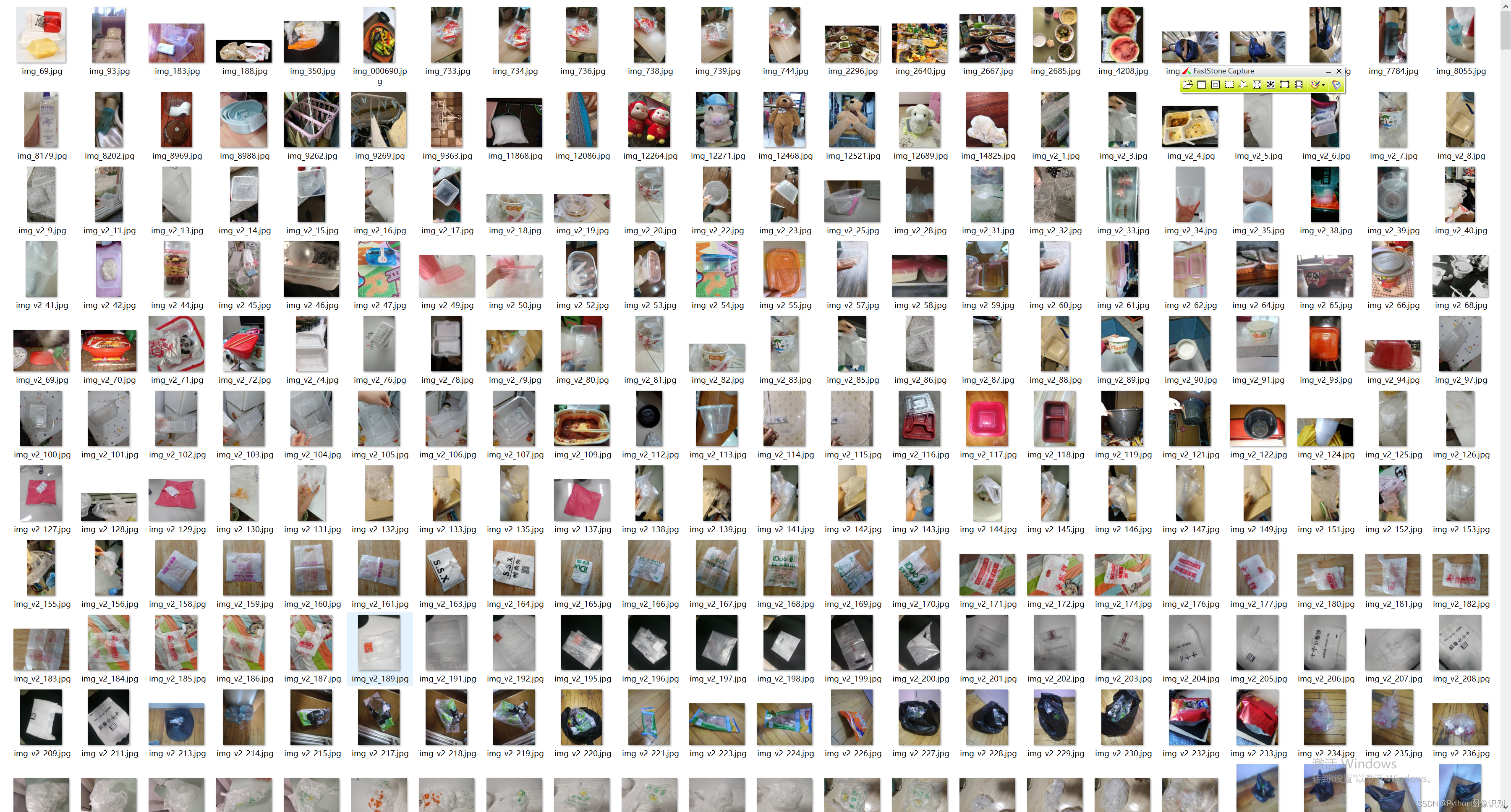
我们使用的数据集是从网上下载的,该数据集共有约5000张图像,具体的类别如下:
1. 可回收物:
- 电源银行(Power bank)
- 袋子(Bag)
- 化妆品用品(Toiletries)
- 塑料玩具(Plastic toys)
- 塑料餐具(Plastic dishes)
- 塑料衣架(Plastic hangers)
- 玻璃餐具(Glass dishes)
- 金属餐具(Metal dishes)
- 快递袋(Express delivery bag)
- 插头和电线(Plug and wire)
- 旧衣服(Old clothes)
- 铝罐(Aluminum can)
- 枕头(Pillow)
- 毛绒玩具(Plush toy)
- 鞋子(Shoes)
- 切菜板(Cutting board)
- 纸板盒子(Cardboard box)
- 调料瓶(Seasoning bottle)
- 酒瓶(Wine bottle)
- 金属食品罐(Metal food cans)
- 金属厨具(Metal kitchenware)
- 锅(Pot)
- 食用油桶(Edible oil barrel)
- 饮料瓶(Beverage bottle)
- 书纸(Book paper)
- 垃圾桶(Trash bin)
- 塑料厨具(Plastic kitchenware)
- 毛巾(Towel)
- 纸袋(Paper bag)
- 饮料纸盒(Beverage carton)
2. 厨余垃圾:
- 剩饭剩菜(Leftover food)
- 大骨头(Large bone)
- 水果皮和果肉(Fruit peel and flesh)
- 茶渣(Tea residue)
- 蔬菜茎叶(Vegetable stalks and leaves)
- 蛋壳(Eggshell)
- 鱼骨(Fish bones)
3. 有害垃圾:
- 干电池(Dry battery)
- 药膏(Ointment)
- 过期药物(Expired medicine)
4. 其他垃圾:
- 快餐盒(Fast food container)
- 受污染的塑料(Contaminated plastic)
- 烟蒂(Cigarette butt)
- 牙签(Toothpick)
- 花盆(Flower pot)
- 陶瓷餐具(Ceramic dishes)
- 筷子(Chopsticks)
- 受污染的纸张(Contaminated paper)
为了方便使用,数据集已经进行了标注,且转为了转换为YOLO格式,并且按照train、val和test的划分进行了组织。您可以直接使用这些数据集进行模型的训练和评估。
下面是一些数据集图片的截图,展示了具体的数据集的示例图像,以帮助您更好地了解数据集的内容和质量。
🌟三、 目标检测介绍
yolov5相关介绍
1. YOLOv5的网络结构
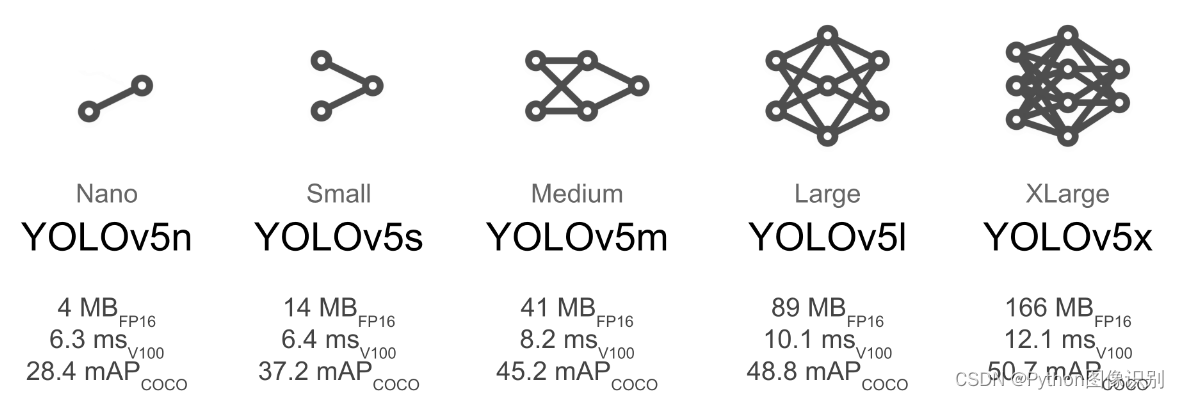
YOLOV5有YOLOv5n,YOLOv5s,YOLOv5m,YOLOV5l、YOLO5x五个版本。这个模型的结构基本一样,不同的是deth_multiole模型深度和width_multiole模型宽度这两个参数。就和我们买衣服的尺码大小排序一样,YOLOV5n网络是YOLOV5系列中深度最小,特征图的宽度最小的网络。其他的三种都是在此基础上不断加深,不断加宽。不过最常用的一般都是yolov5s模型。
yolov5s 网络架构如下:
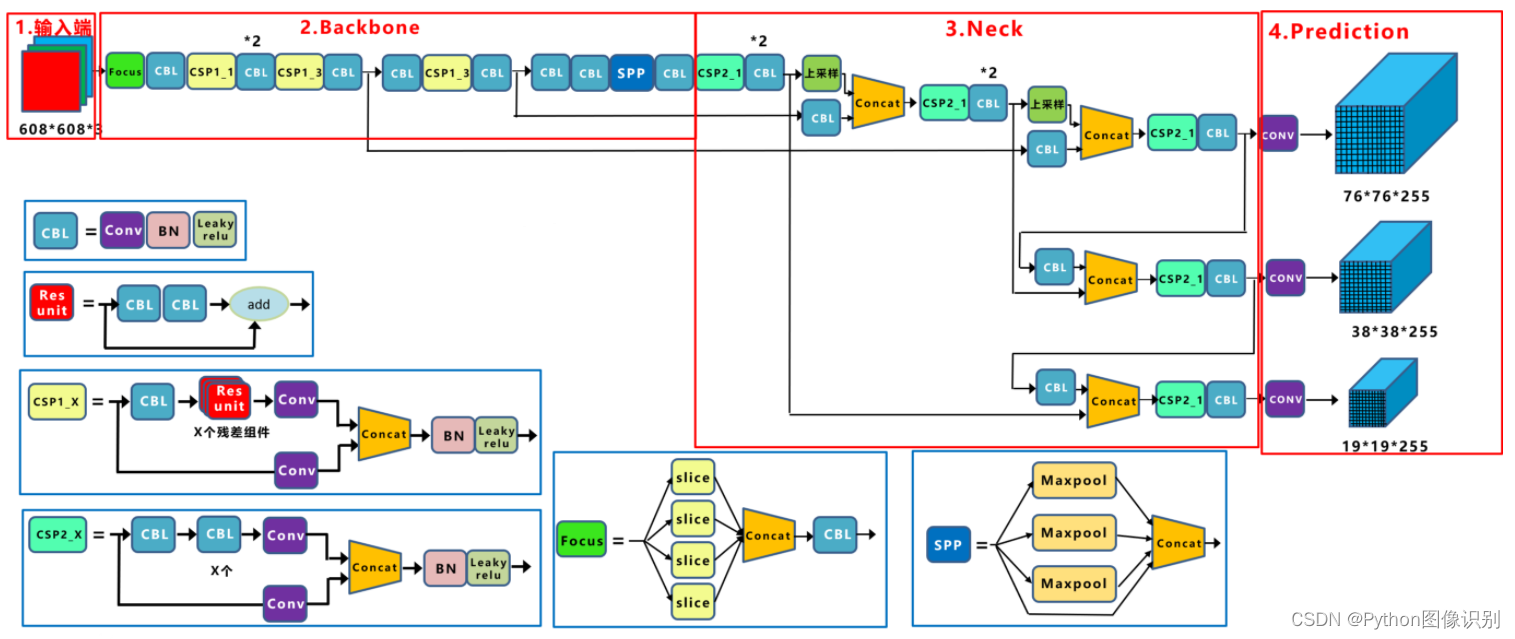
(1)输入端: Mosaic数据增强、自适应锚框计算、自适应图片缩放
(2)Backbone: Focus结构、CSP结构
(3)Neck: FPN+PAN结构
(4)Prediction: GIOU_Loss
基本组件:
- Focus: 基本上就是YOLO v2的passthrough.
- CBL: 由Conv+Bn+Leaky_relu激活函数三者组成
- CSP1 X: 借鉴CSPNet网络结构,由三个卷积层和X个Res unint模块Concate组成
- CSP2 X: 不再用Res unint模块,而是改为CBL。
- SPP: 采用1x1,5x5,9x9,13x13的最大池化的方式,进行多尺度融合
2. 输入端
(1)Mosaic数据增强
YOLO5在输入端采用了 Mosaic数据增强 ,Mosaic 数据增强算法将多张图片按照一定比例组合成一张图片,使模型在更小的范围内识别目标。Mosaic 数据增算法参考 CutMix数增强算法。CutMix数据增强算法使用两张图片进行拼接,而 Mosaic 数据增强算法一般使用四张进行拼接,但两者的算法原理是非常相似的。

Mosaic数据增强的主要步骤为:
(1) 随机选取图片拼接基准点坐标 (xc,yc),另随机选取四张图片。
(2)四张图片根据基准点,分别经过尺寸调整和比例缩放后,放置在指定尺寸的大图的左上,右上,左下,右下位置。
(3) 根据每张图片的尺寸变换方式,将映射关系对应到图片标签上。
(4)依据指定的横纵坐标,对大图进行拼接。处理超过边界的检测框坐标。
采用Mosaic数据增强的方式有几个优点:
(1)丰富数据集: 随机使用4张图像,随机缩放后随机拼接,增加很多小目标,大大增加了数据多样性
(2)增强模型鲁棒性: 混合四张具有不同语义信息的图片,可以让模型检测超出常规语境的目标.
(3)加强批归一化层(Batch Normalization) 的效果: 当模型设置 BN 操作后,训练时会尽可能增大批样本总量 (BatchSize),因为BI 原理为计算每一个特征层的均值和方差,如果批样本总量越大,那么 BN 计算的均值和方差就越接近于整个数据集的均值和方差,效果越好。
(4)Mosaic 数据增强算法有利于提升小目标检测性能: Mosaic 数据增强图像由四张原始图像拼接而成,这样每张图像会有更大概率有含小目标,从而提升了模型的检测能力。
(2) 自适应锚框计算
**之前我们学的 YOLOV3、YOLv4,对于不同的数据集,都会计算先验框 anchor。**然后在训练时,网络会在 anchor 的基础上进行预测,输出预测框,再和标签框进行对比,最后就进行梯度的反向传播。
在YOLOV3、YOLOV4 中,训练不同的数据集时,是使用单独的脚本进行初始锚框的计算,在 YOLOV5 中,则是将此功能嵌入到整个训练代码里中。所以在每次训练开始之前,它都会根据不同的数据集来自适应计算 anchor。
自适应的计算具体过程:
? ①获取数据集中所有目标的宽和高
?②将每张图片中按照等比例缩放的方式到 resize 指定大小,这里保证宽高中的最大值符合指定大小。
?③将 bboxes 从相对坐标改成绝对坐标,这里乘以的是缩放后的宽高。
?④筛选 bboxes,保留宽高都大于等于两个像素的 bboxes.
?⑤使用 k-means 聚类三方得到n个 anchors,与YOLOv3、YOLOv4 操作一样
?⑥使用遗传算法随机对 anchors 的宽高进行变异。倘若变异后的效果好,就将变异后的结果赋值给 anchors;如果变异后效果变差就跳过,默认变异1000次。这里是使用 anchor fitness 方法计算得到的适应度 fitness,然后再进行评估。
(3)自适应图片缩放
在常用的目标检测算法中,不同的图片长宽也不相同,因此常用的方式是将原始图片统一缩放到一个标准尺寸,在送入检测网络中。
比如yolo算法中常用416416,608608等尺寸,比如对下面800*600的图像进行缩放。

但yolov5代码中对此进行了改进,也是yolov5推理速度能够很快的一个不错的trick。
作者认为,在项目实际使用时,很多图片的长宽比不同,因此缩放填充后,两端的黑边大小都不同,而如果填充的比较多,则存在信息冗余,影响推理速度。
因此在yolov5的代码中datasets.py的letterbox函数进行了修改,对原始图像自适应的添加最少的黑边。

图像高度上两端的黑边变少了,在推理时,计算量也会减少,即目标检测速度会得到提升。
通过这种简单的改进,推理速度得到了37%的提升,可以说效果很明显。
3. Backbone
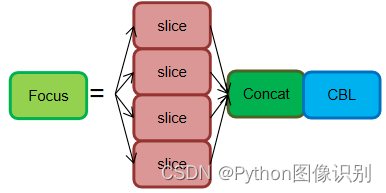
(1)Focus结构
Focus模块在YOLOV5中是图片进入Backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长得差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
以YOLOV5s为例,原始的640 x 640 x 3的图像输入Focus结构,采用切片操作,先变成320 * 320 12的特征图,再经过一次卷积操作
最终变成320 x 320 x 32的特征图
切片操作如下:
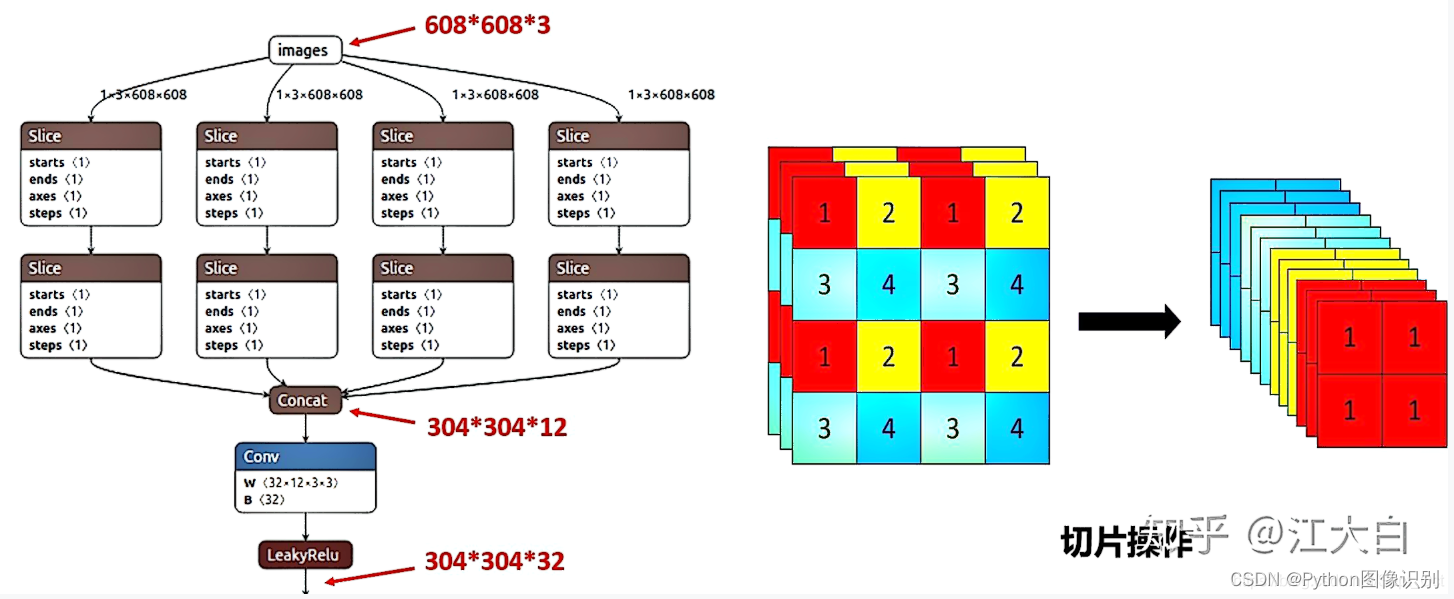
作用: 可以使信息不丢失的情况下提高计算力
不足: Focus 对某些设备不支持目不友好,开销很大,另外切片对不产的话模型就崩了
后期改进: 在新版中,YOLOV5 将Focus 模块替换成了一 6x6 的券积层、两者的计算量是等价的,但是对工一些 GPU 设备,使用6x 6 的卷积会更加高效。
(2)CSP结构
yolov4网络结构中,借鉴了CSPNet的设计思路,在主干网络中设计了CSP结构。
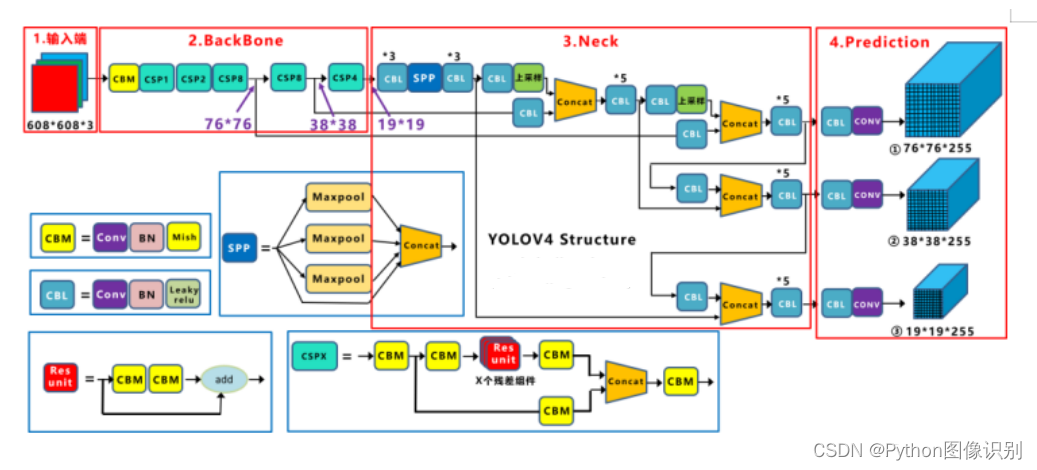
yolov5与yolov4不同点在于,yolov4中只有主干网络使用了CSP结构。 而yolov5中设计了两种CSP结构,以yolov5s网络为例,CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
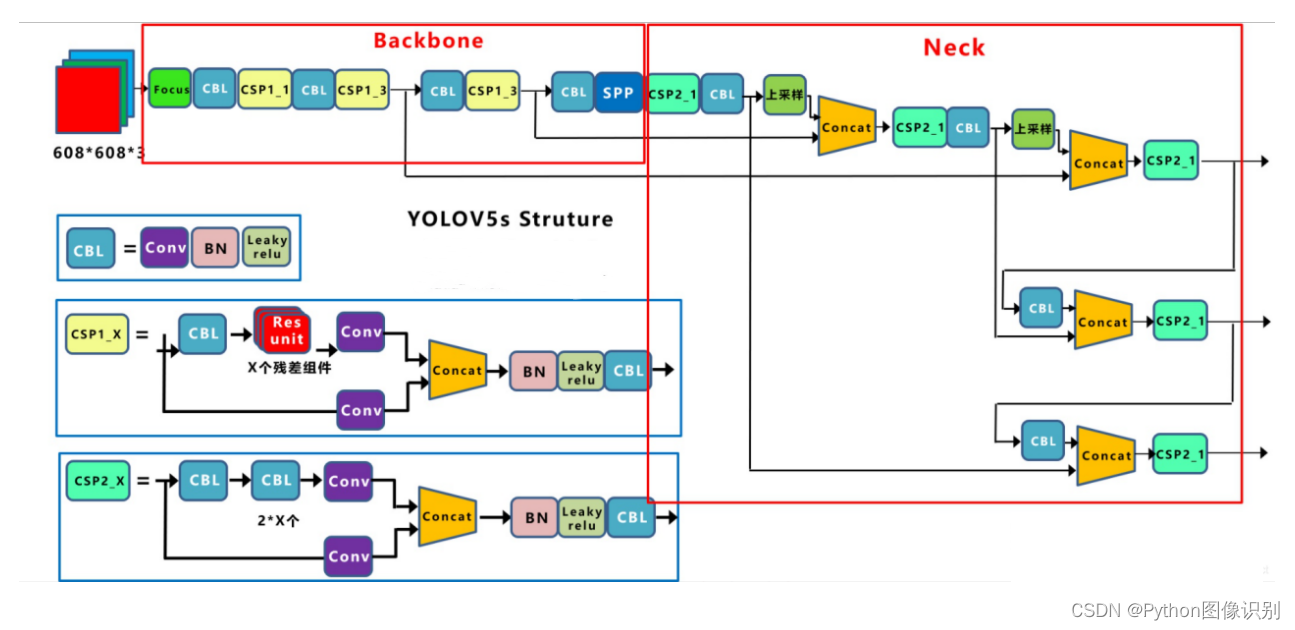
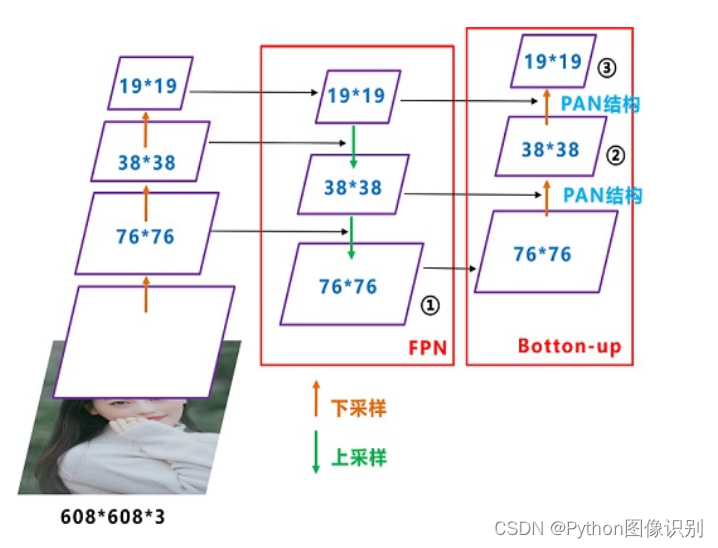
4. Neck
YOLOv5现在的Neck和YOLOV4中一样,都采用FPN+PAN的结构。但是在它的基础上做了-些改进操作: YOLOV4的Neck结构中,采用的都是普通的卷积操作,而YOLOV5的Neck中,采用CSPNet设计的CSP2结构,从而加强了网络特征融合能力。
结构如下图所示,FPN层自顶向下传达强语义特征,而PAN塔自底向上传达定位特征:
5. Head
(1) NMS非极大值抑制
NMS 的本质是搜索局部极大值,抑制非极大值元素.
非极大值抑制,主要就是用来抑制检测时几余的框。因为在目标检测中,在同一目标的位置上会产生大量的候选框,这些候选框相互之间可能会有重叠,所以我们需要利用非极大值抑制找到最佳的目标边界框,消除几余的边界框。
算法流程:
? 1.对所有预测框的置信度降序排序
? 2.选出置信度最高的预测框,确认其为正确预测,并计算他与其他预测框的 IOU
? 3.根据步骤2中计算的IOU 去除重鲁度高的,IOU > threshold 值就直接删除
? 4.剩下的预测框返回第1步,直到没有剩下的为止
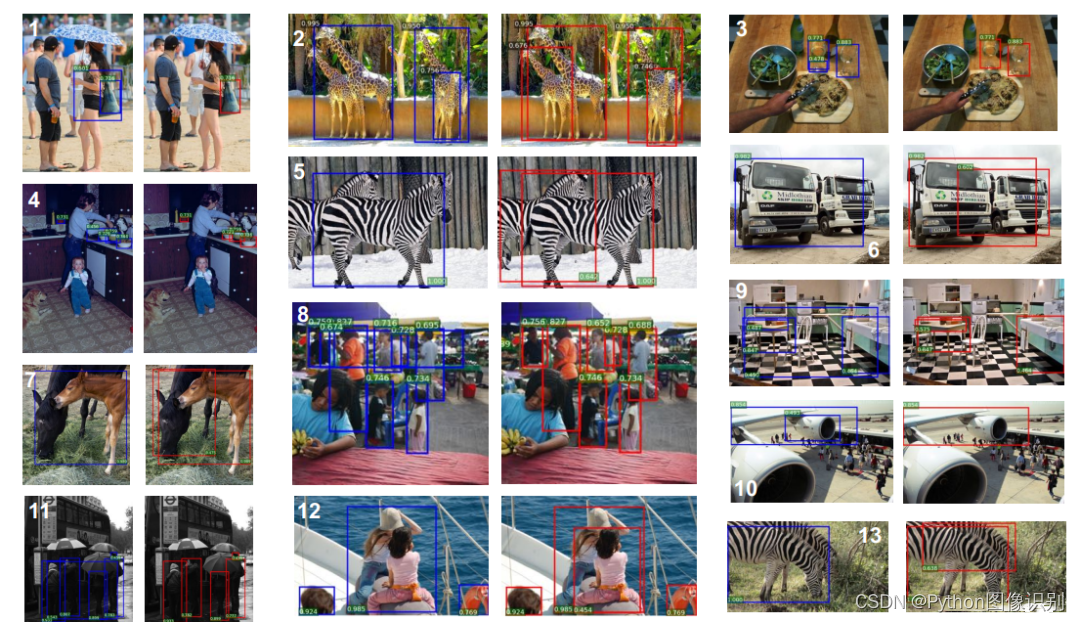
SoftNMS:
当两个目标靠的非常近时,置信度低的会被置信度高的框所抑制,那么当两个目标靠的十分近的时候就只会识别出一个 BBox。为了解决这个问题,可以使用 softNMS。
它的基本思想是用稍低一点的分数来代替原有的分数,而不是像 NMS 一直接置零。
6、训练策略
(1) 多尺度训练 (Multi-scale training) 如果网络的输入是416 x 416。那么训练的时候就会从 0.5 x 416 到 1.5 x 416 中任意取值但所取的值都是32的整数倍。
(2) 训练开始前使用 warmup 进行训练 在模型预训练阶段,先使用较小的学习率训练一些epochs或者steps (如4个 epoch 或10000step ) 再修改为预先设置的学习率进行训练。
(3) 使用了 cosine 学习率下降策略 (Cosine LR scheduler)
(4)采用了 EMA 更新权重(Exponential Moving Average) 相当于训练时给参数赋予一个动量,这样更新起来就会更加平滑
(5) 使用了 amp 进行混合精度训练 (Mixed precision) 能够减少显存的占用并且加快训练速度,但是需要 GPU 支持
四、 yolov5训练步骤
此代码的训练步骤极其简单,不需要修改代码,直接通过cmd就可以命令运行,命令都已写好,直接复制即可,命令如下图:
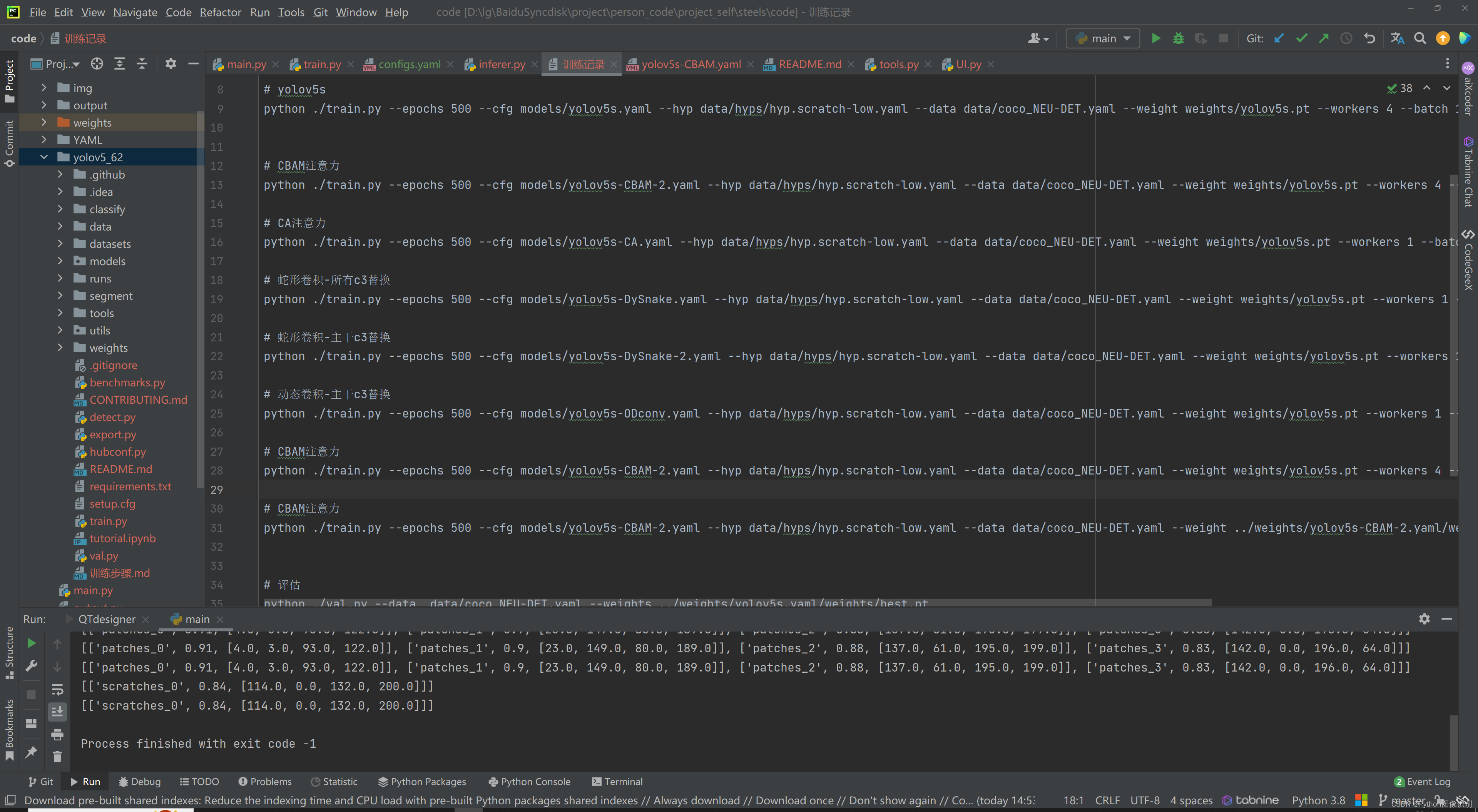
下面这条命令是 训练 添加 CBAM 注意力机制的命令,复制下来,直接就可以运行,看到训练效果(**需要将coco_NEU-DET.yaml修改为自己的数据集的yaml文件 **)。
python ./train.py --epochs 500 --cfg models/yolov5s-CBAM-2.yaml --hyp data/hyps/hyp.scratch-low.yaml --data data/coco_NEU-DET.yaml --weight weights/yolov5s.pt --workers 4 --batch 16
执行完上述命令后,即可完成训练,训练过程如下:
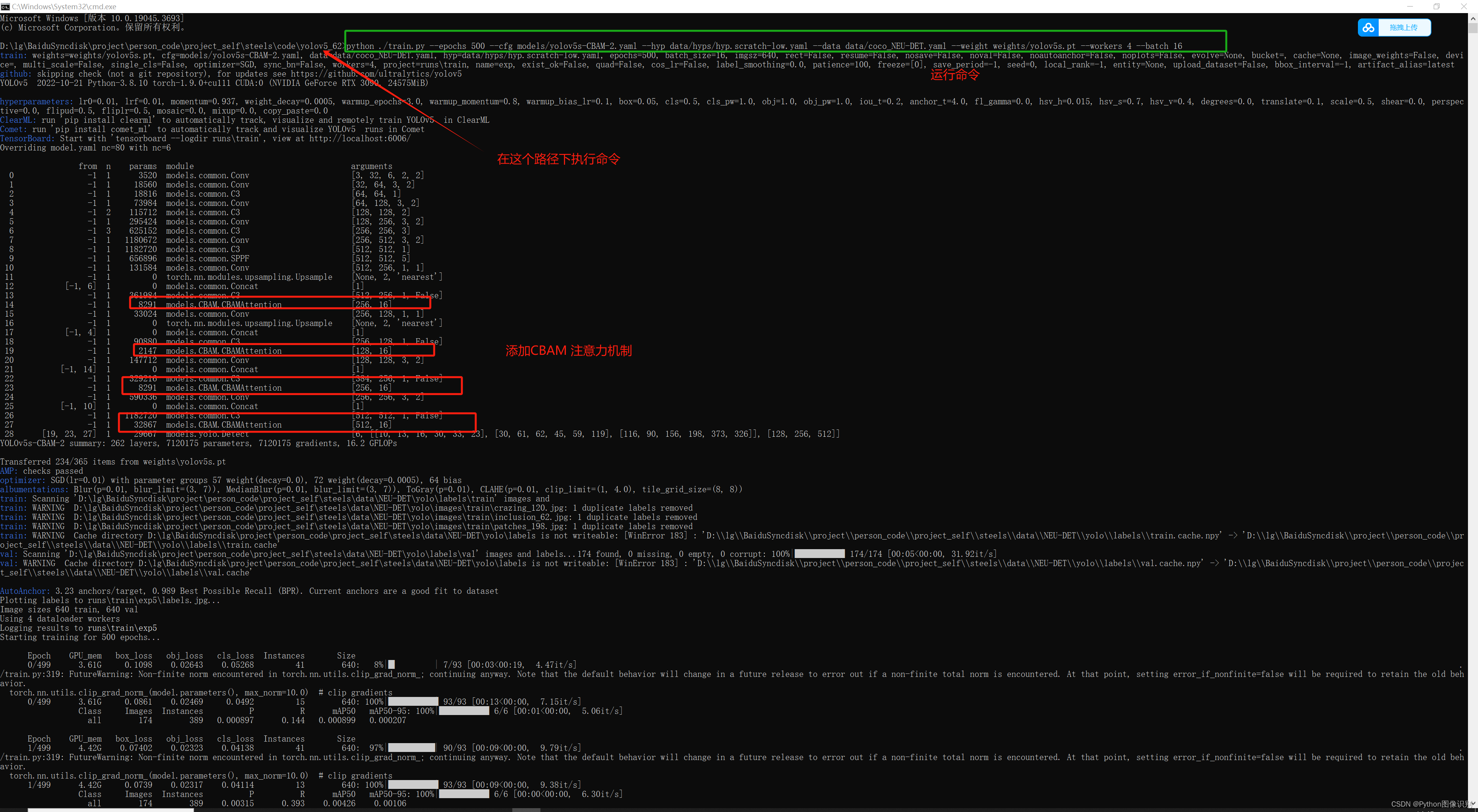
下面是对命令中各个参数的详细解释说明:
-
python: 这是Python解释器的命令行执行器,用于执行后续的Python脚本。 -
./train.py: 这是要执行的Python脚本文件的路径和名称,它是用于训练目标检测模型的脚本。 -
--epochs 500: 这是训练的总轮数(epochs),指定为500,表示训练将运行500个轮次。 -
--cfg models/yolov5s-CBAM-2.yaml: 这是YOLOv5模型的配置文件的路径和名称,它指定了模型的结构和参数设置。 -
--hyp data/hyps/hyp.scratch-low.yaml: 这是超参数文件的路径和名称,它包含了训练过程中的各种超参数设置,如学习率、权重衰减等。 -
--data data/coco_NEU-DET.yaml: 这是数据集的配置文件的路径和名称,它指定了训练数据集的相关信息,如类别标签、图像路径等。 -
--weight weights/yolov5s.pt: 这是预训练权重文件的路径和名称,用于加载已经训练好的模型权重以便继续训练或进行迁移学习。 -
--workers 4: 这是用于数据加载的工作进程数,指定为4,表示使用4个工作进程来加速数据加载。 -
--batch 16: 这是每个批次的样本数,指定为16,表示每个训练批次将包含16个样本。
通过运行上面这个命令,您将使用YOLOv5模型对目标检测任务进行训练,训练500个轮次,使用指定的配置文件、超参数文件、数据集配置文件和预训练权重。同时,使用4个工作进程来加速数据加载,并且每个训练批次包含16个样本。
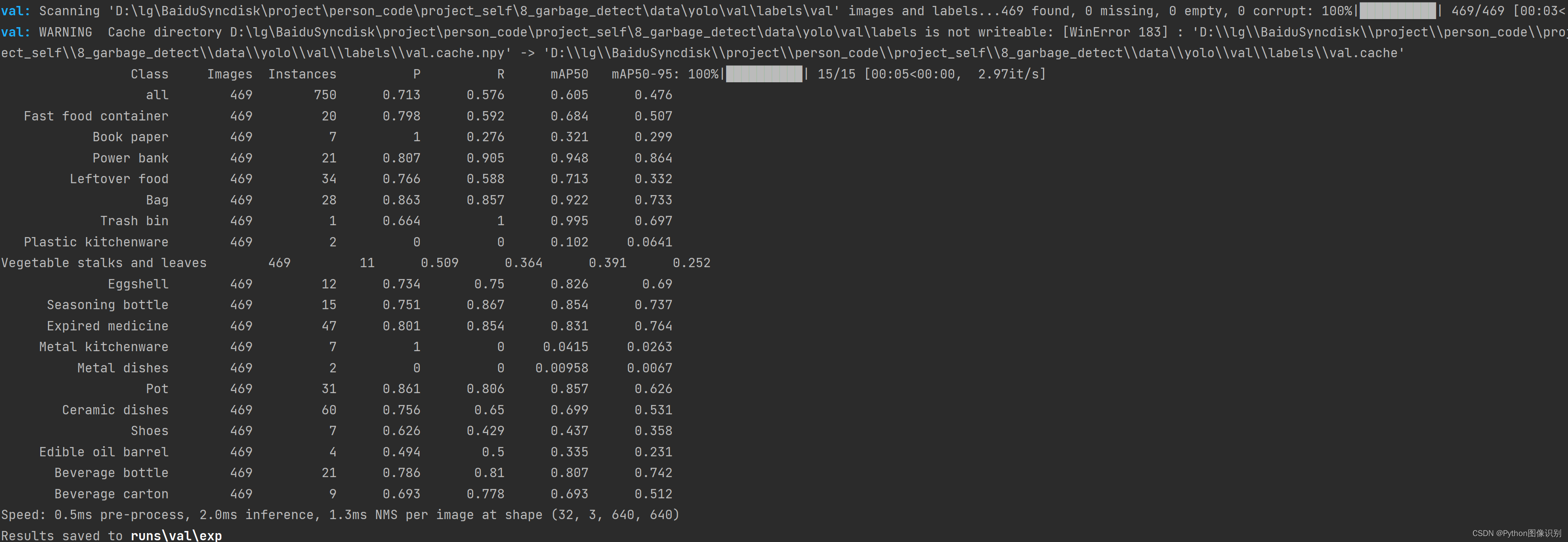
五、 yolov5评估步骤
评估步骤同训练步骤一样,执行1行语句即可,注意--weights需要变为自己想要测试的模型路径,VOC_helmet.yaml替换为自己的数据集的yaml文件。
python ./val.py --data data/VOC_helmet.yaml --weights ../weights/yolov5s.yaml/weights/best.pt
评估结果如下:
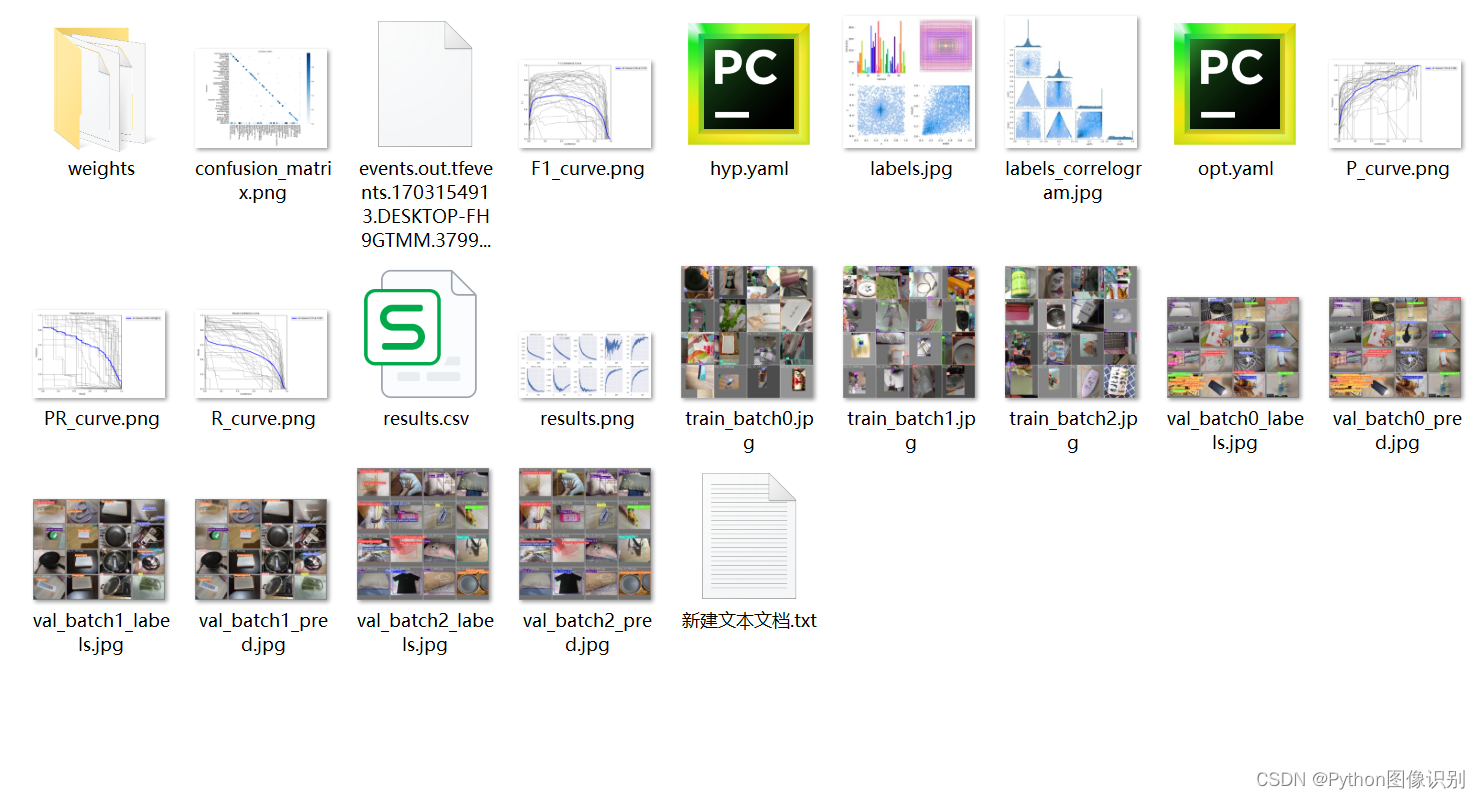
六、 训练结果
我们每次训练后,会在 run/train 文件夹下出现一系列的文件,如下图所示:
🌟下载链接
? ?该代码采用Pycharm+Python3.8开发,经过测试能成功运行,运行界面的主程序为main.py,提供用到的所有程序。为确保程序顺利运行,请按照requirements.txt配置Python依赖包的版本。Python版本:3.8,为避免出现运行报错,请勿使用其他版本,详见requirements.txt文件;
? ? 若您想获得博文中涉及的实现完整全部程序文件(包括训练代码、测试代码、训练数据、测试数据、视频,py、 UI文件等,如下图),这里已打包上传至博主的面包多平台,可通过下方项目讲解链接中的视频简介部分下载,完整文件截图如下:
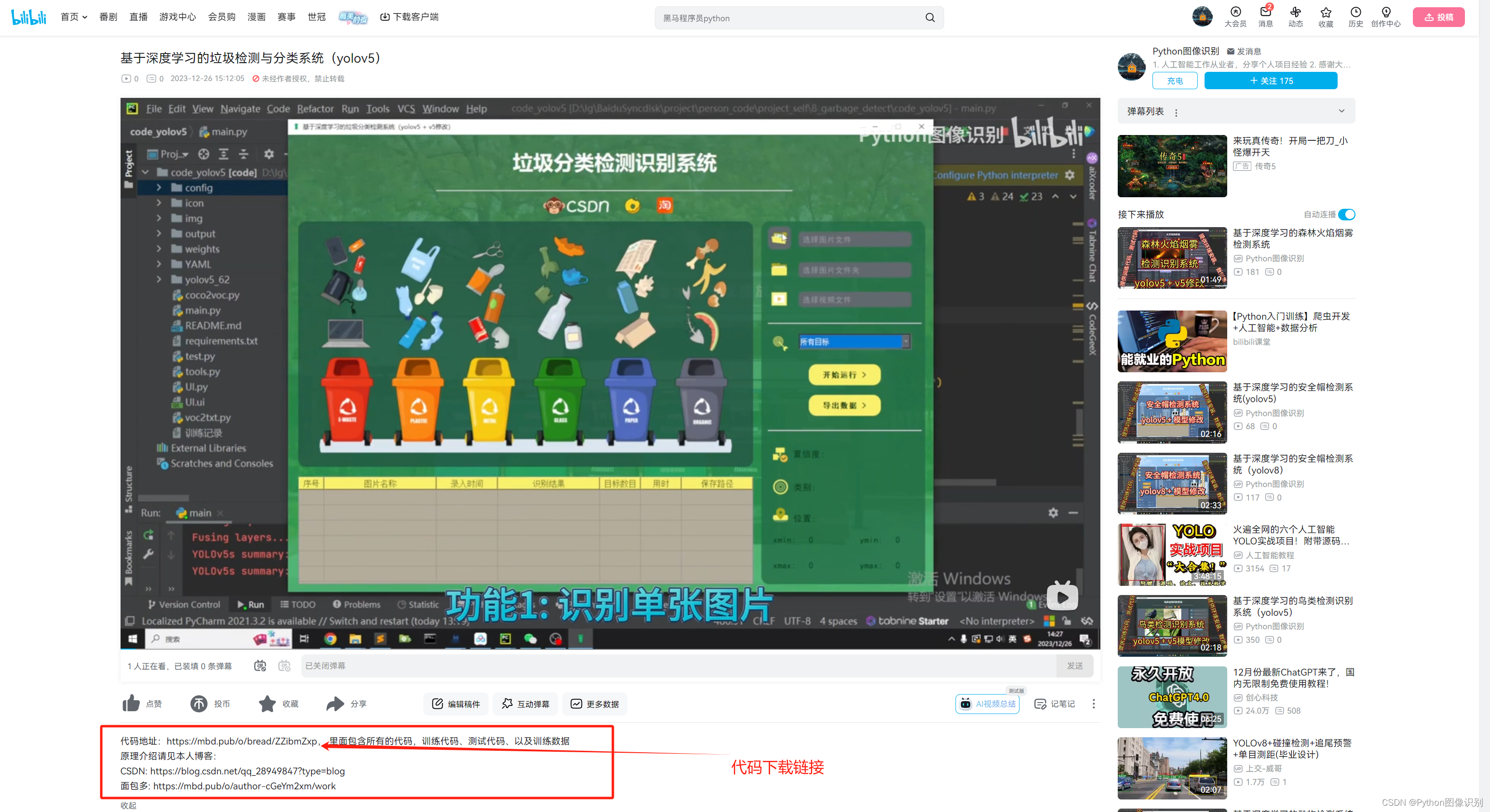
项目讲解链接:B站
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 中国电子学会2022年12月份青少年软件编程Scratch图形化等级考试试卷二级真题(含答案)
- 矩阵微分笔记(1)
- 如何挖掘过期老域名并注册一个 DA 为 10 的高价值老域名
- 实现顺序表的增删改查
- Python中使用多种方法输出哈沙德数
- 欧盟GDPR 和车联网个人数据保护指南
- 深入.NET平台和C#编程总结大全
- FreeRTOS 任务间的通信
- 微信小程序 获取地址信息(uniapp)
- 深入探讨MySQL数据库的InnoDB存储引擎架构