Nature Machine Intelligence 人形机器人的层次化生成建模
发布时间:2023年12月30日
2023年11月2日,德国英特尔研究院,英国伦敦大学学院和美国VERSES研究实验室的研究人员在《Nature Machine Intelligence》杂志发表了一篇题为“Hierarchical generative modelling for autonomous robots”的论文。
研究内容
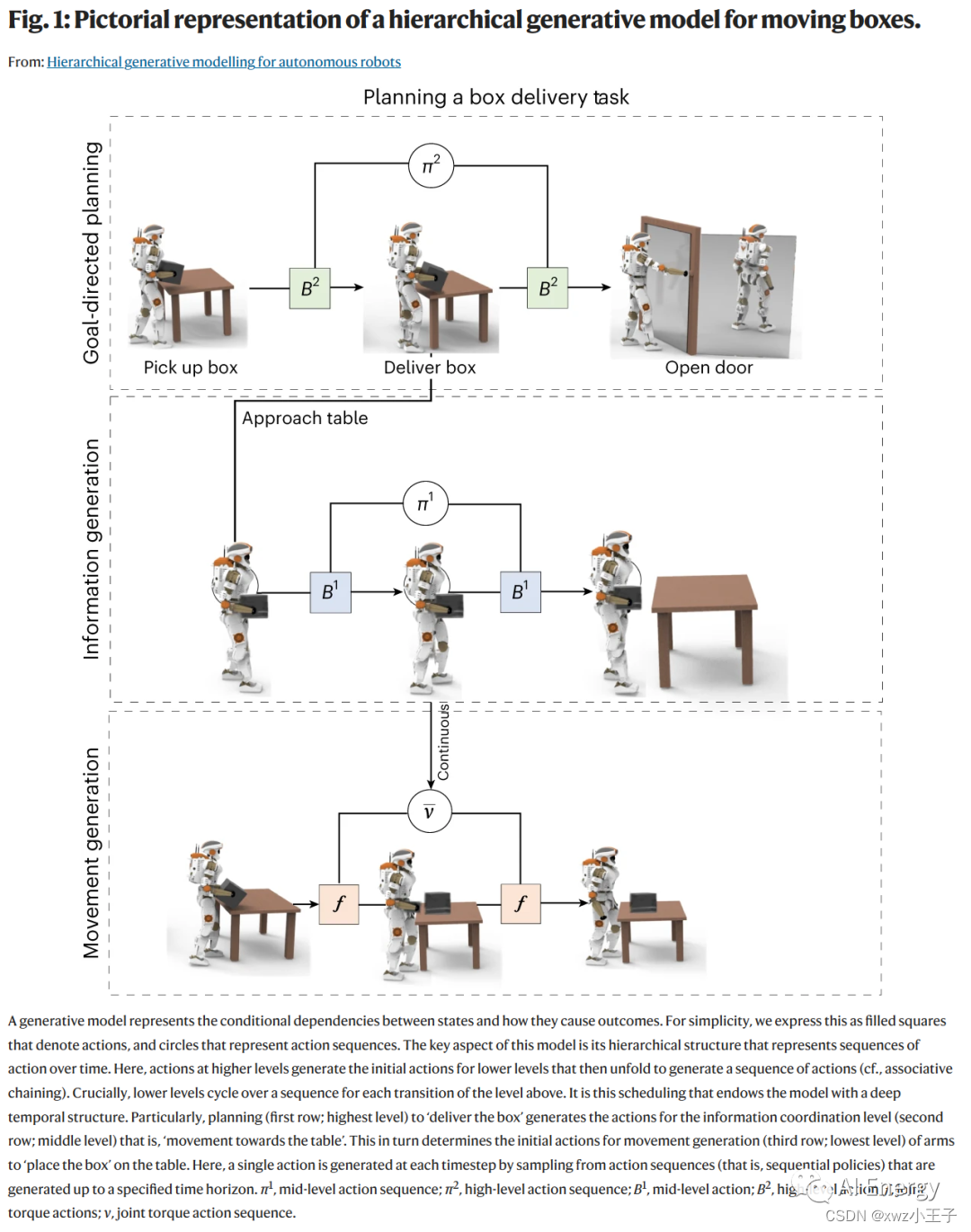
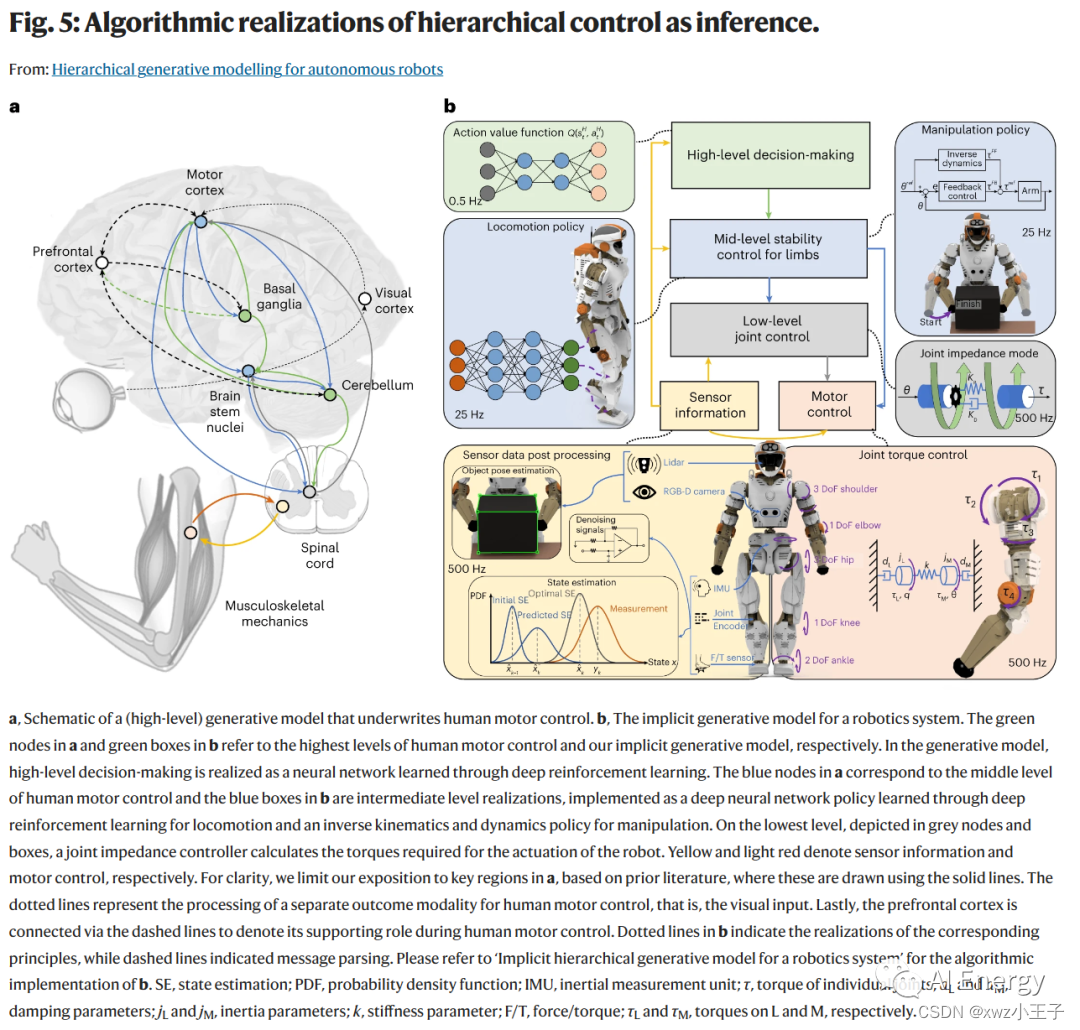
人类通过规划、执行和组合单个肢体动作来产生复杂的全身运动。本文研究了运动控制的这一基本方面,并通过多层次规划的分层生成模型来解决自主完成任务的问题,模拟人类运动控制的深层时间架构。探索了嵌套时间尺度的时间深度,其中前向或生成模型的连续层级展开,例如,物体运送既需要全局规划,也需要肢体运动的局部协调。这种时间尺度的分离表明,分层组织单个肢体的全局规划和局部控制具有优势。通过物理模拟广泛验证了本研究提出的方案。
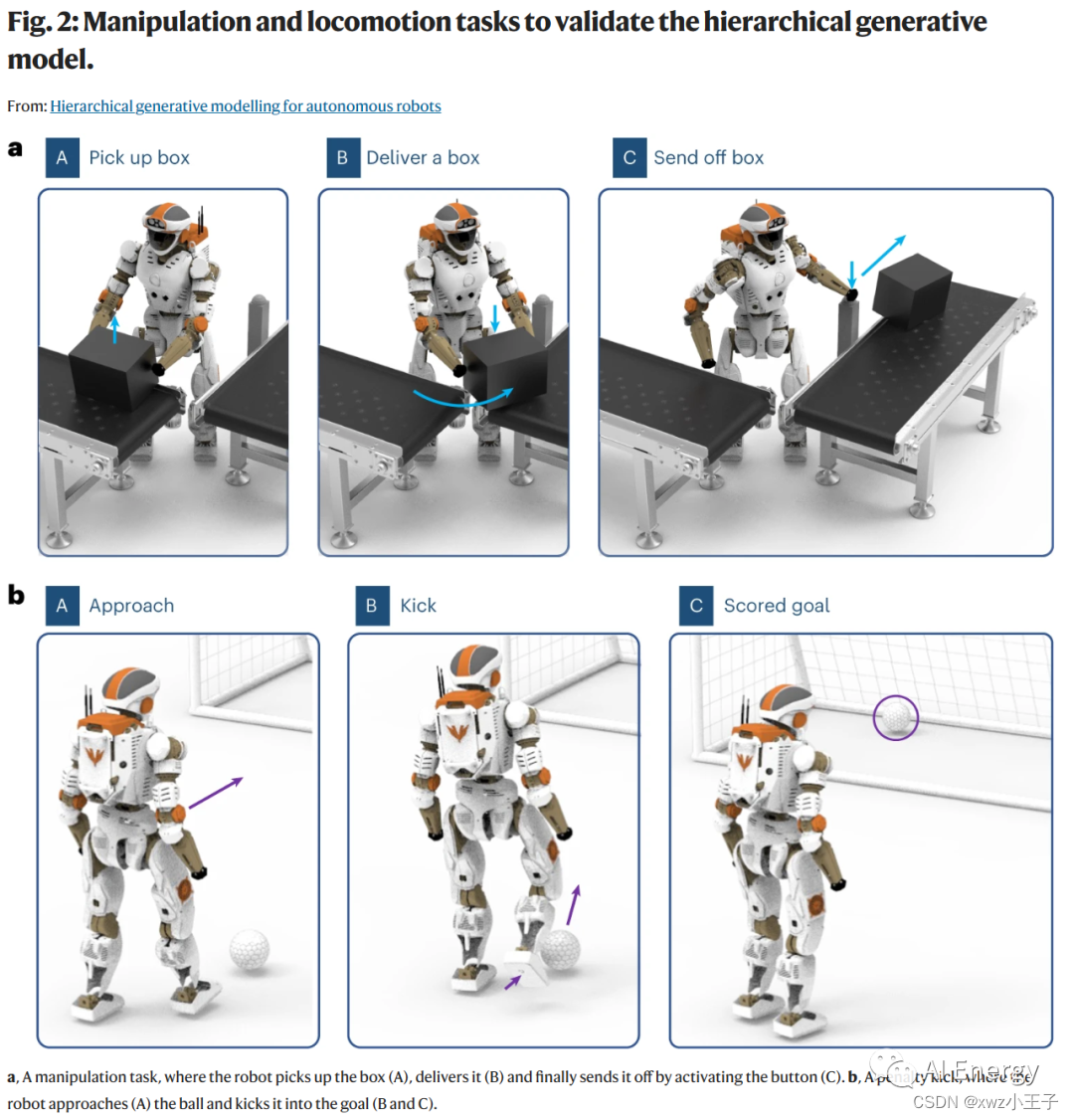
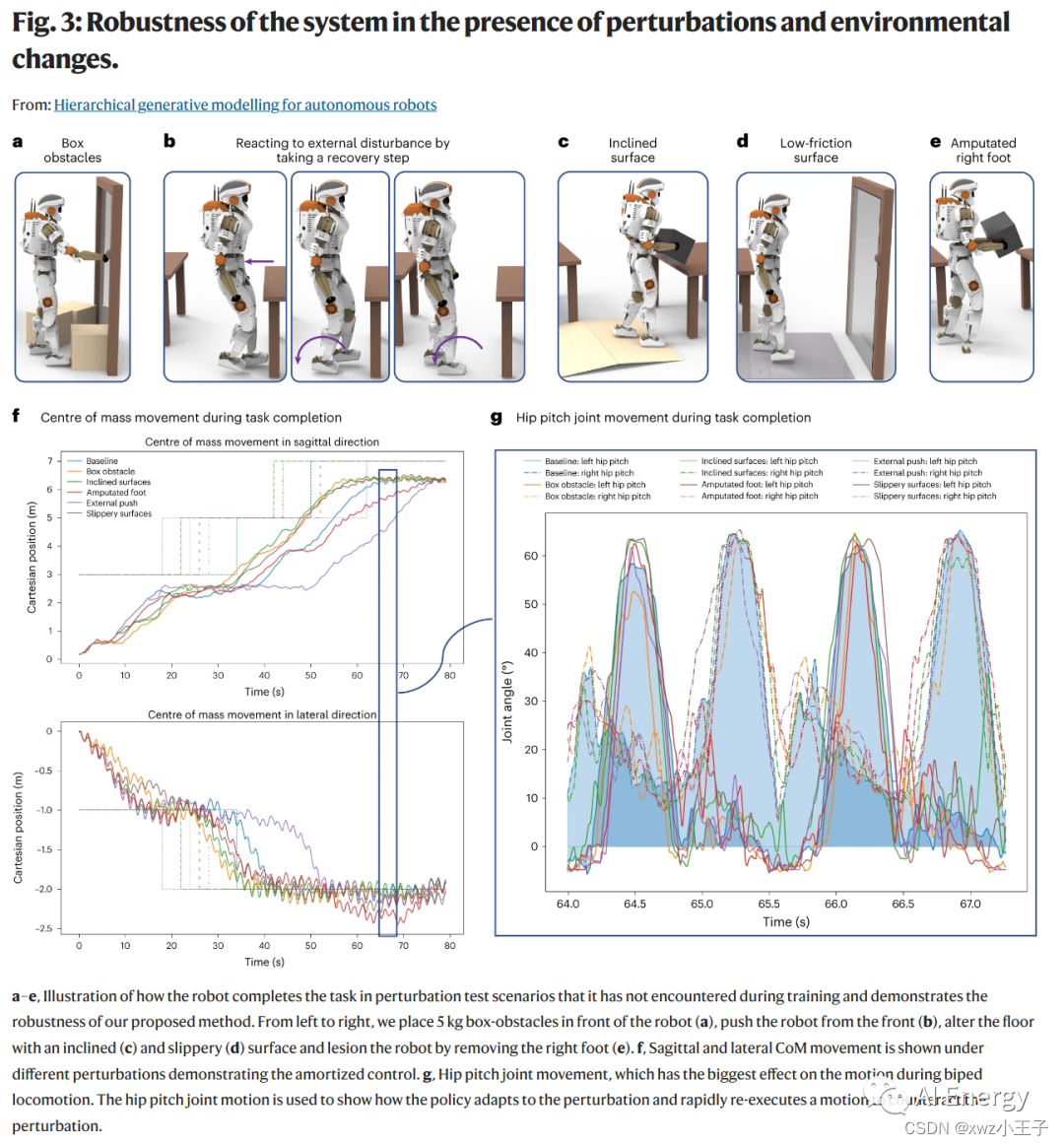
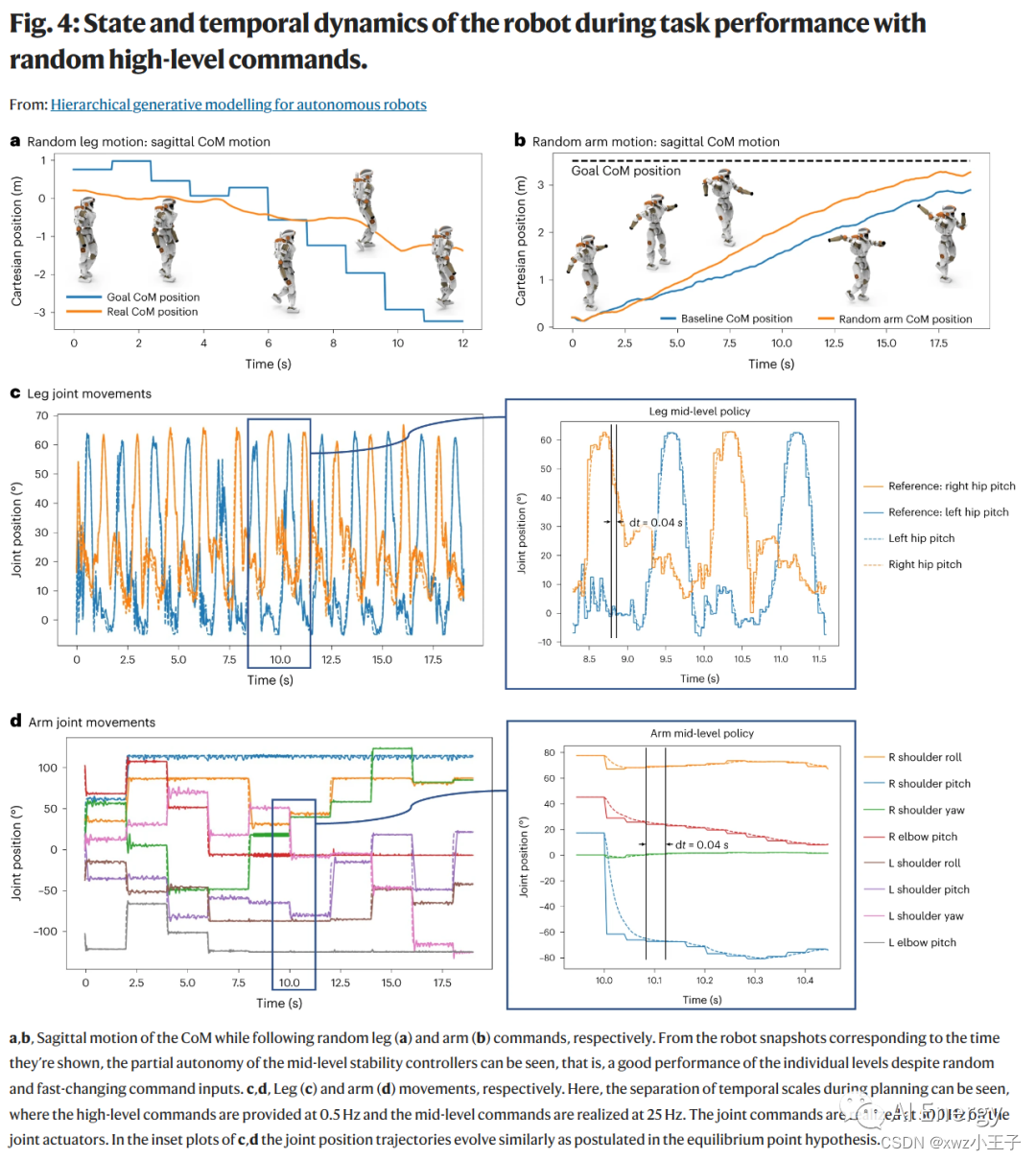
利用分层生成模型,本文展示了一个体现型人工智能系统–仿人机器人–能够自主完成一项需要综合利用运动、操纵和抓取的复杂任务:机器人能够熟练地取回和搬运一个盒子,打开并走过一扇门,踢出足球,即使在身体受损和地面不规则的情况下也能表现出稳定的性能。本文的研究结果证明了由人类启发的运动控制在具身人工智能机器人上的有效性和可行性,突出了分层架构在实现自主完成具有挑战性的目标任务方面的可行性。
文章来源:https://blog.csdn.net/weixin_44887311/article/details/135302373
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【QML COOK】- 009-组件(Components)
- tp6数据库查询,模型中使用left join
- DC电源模块的关键参数解读
- IDEA启动项目遇到的异常汇总,包括插件异常,版本依赖异常,启动异常等以及对应的解决办法
- python与机器学习2,激活函数
- scalpel一款命令行漏洞扫描工具,支持深度参数注入,拥有一个强大的数据解析和变异算法
- 使用 arm-linux-androideabi-addr2line 工具定位 libunity.so 崩溃问题
- go开发--操作mysql数据库
- C# byte转int:大小端读取
- Open CASCADE学习|入门Hello world