yolov8 C++目标检测推理代码上加上关键点输出
发布时间:2023年12月28日
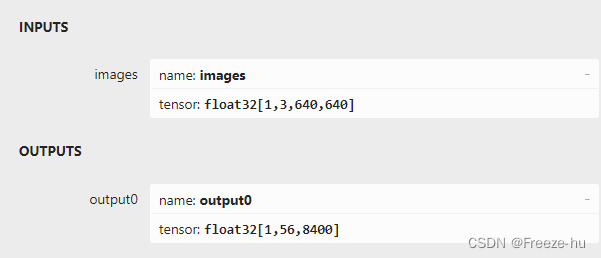
1.在yolov8 的目标检测代码上加上关键点解析输出,下载yolov8n-pose.pt转换为onnx格式的 yolov8n-pose.onnx ,输出 1,56,8400
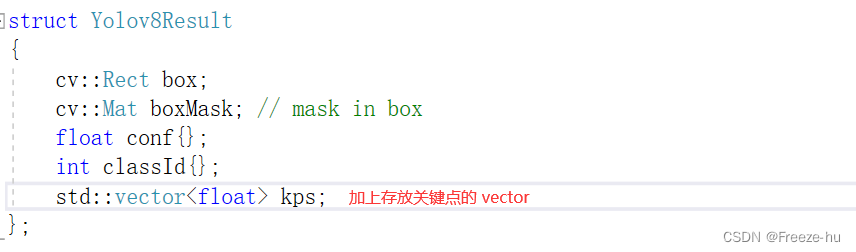
2.在输出结果结构体中加上关键点的集合 kps
3.修改classNums的值获取

4.在推理结果解析的时候,增加关键点信息的输出,这里只取出17个关键点的中的前5个关键点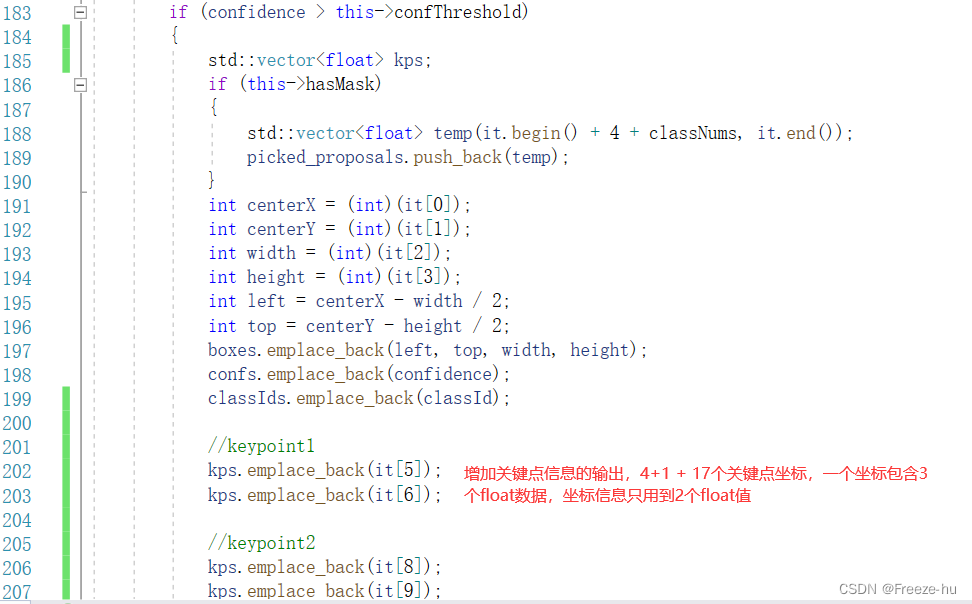
5.在640*640推理的后的坐标信息转换为原图坐标信息

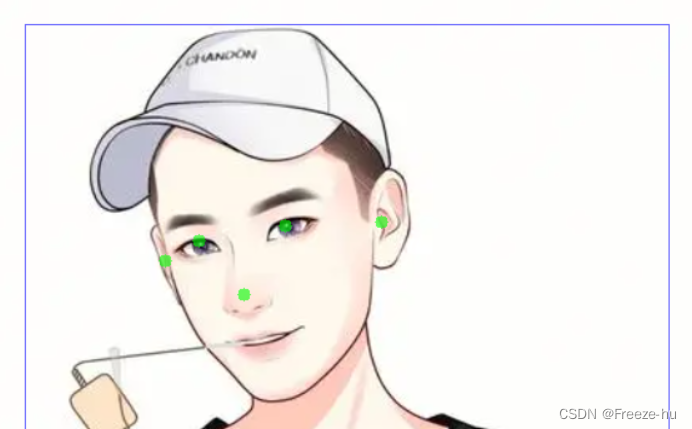
6.在原图中标出最前面的5个关键点

7.运行的效果如下
8.main.cpp
#include <regex>
#include <iostream>
#include <opencv2/opencv.hpp>
#include <filesystem>
#include <ctime>
#include "cmdline.h"
#include "utils.h"
#include "yolov8Predictor.h"
int main(int argc, char *argv[])
{
float confThreshold = 0.1f;
float iouThreshold = 0.2f;
float maskThreshold = 0.2f;
/*
bool isGPU = cmd.exist("gpu");
const std::string classNamesPath = cmd.get<std::string>("class_names");
const std::vector<std::string> classNames = utils::loadNames(classNamesPath);
const std::string imagePath = cmd.get<std::string>("image_path");
const std::string savePath = cmd.get<std::string>("out_path");
const std::string suffixName = cmd.get<std::string>("suffix_name");
const std::string modelPath = cmd.get<std::string>("model_path");
*/
bool isGPU = false;
std::string classNamesPath;
std::vector<std::string>classNames;
std::string imagePath;
std::string savePath;
std::string suffixName;
std::string modelPath;
/*
if (classNames.empty())
{
std::cerr << "Error: Empty class names file." << std::endl;
return -1;
}
if (!std::filesystem::exists(modelPath))
{
std::cerr << "Error: There is no model." << std::endl;
return -1;
}
if (!std::filesystem::is_directory(imagePath))
{
std::cerr << "Error: There is no model." << std::endl;
return -1;
}
if (!std::filesystem::is_directory(savePath))
{
std::filesystem::create_directory(savePath);
}
*/
classNames.push_back("r");
modelPath = "./yolov8n-pose.onnx";
YOLOPredictor predictor{nullptr};
try
{
predictor = YOLOPredictor(modelPath, isGPU,
confThreshold,
iouThreshold,
maskThreshold);
std::cout << "Model was initialized." << std::endl;
}
catch (const std::exception &e)
{
std::cerr << e.what() << std::endl;
return -1;
}
assert(classNames.size() == predictor.classNums);
std::regex pattern(".+\\.(jpg|jpeg|png|gif)$");
std::cout << "Start predicting..." << std::endl;
cv::VideoCapture capture;
capture.open(1);
if (!capture.isOpened()) {
printf("could not read this video file...\n");
return -1;
}
cv::Size S = cv::Size((int)capture.get(cv::CAP_PROP_FRAME_WIDTH),
(int)capture.get(cv::CAP_PROP_FRAME_HEIGHT));
capture.set(cv::CAP_PROP_FRAME_WIDTH, 1280);
capture.set(cv::CAP_PROP_FRAME_HEIGHT, 1024);
cv::Mat frame;
while (capture.read(frame)) {
clock_t startTime, endTime;
startTime = clock();
frame = cv::imread("./person.png");
std::vector<Yolov8Result> result = predictor.predict(frame);
utils::visualizeDetection(frame, result, classNames);
endTime = clock();
std::cout << "The total run time is: " << (double)(endTime - startTime) / CLOCKS_PER_SEC << "seconds" << std::endl;
cv::imshow("Inference", frame);
char c = cv::waitKey(1);
if (c == 27) {
break;
}
}
return 0;
}
9.utils.cpp
#include "utils.h"
size_t utils::vectorProduct(const std::vector<int64_t> &vector)
{
if (vector.empty())
return 0;
size_t product = 1;
for (const auto &element : vector)
product *= element;
return product;
}
std::wstring utils::charToWstring(const char *str)
{
typedef std::codecvt_utf8<wchar_t> convert_type;
std::wstring_convert<convert_type, wchar_t> converter;
return converter.from_bytes(str);
}
std::vector<std::string> utils::loadNames(const std::string &path)
{
// load class names
std::vector<std::string> classNames;
std::ifstream infile(path);
if (infile.good())
{
std::string line;
while (getline(infile, line))
{
if (line.back() == '\r')
line.pop_back();
classNames.emplace_back(line);
}
infile.close();
}
else
{
std::cerr << "ERROR: Failed to access class name path: " << path << std::endl;
}
// set color
srand(time(0));
for (int i = 0; i < 2 * classNames.size(); i++)
{
int b = rand() % 256;
int g = rand() % 256;
int r = rand() % 256;
colors.push_back(cv::Scalar(b, g, r));
}
return classNames;
}
void utils::visualizeDetection(cv::Mat &im, std::vector<Yolov8Result> &results,
const std::vector<std::string> &classNames)
{
cv::Mat image = im.clone();
for (const Yolov8Result &result : results)
{
int x = result.box.x;
int y = result.box.y;
int x2 = x + result.box.width;
int y2 = y + result.box.height;
int conf = (int)std::round(result.conf * 100);
int classId = result.classId;
std::string label = classNames[classId] + " 0." + std::to_string(conf);
int baseline = 0;
cv::Size size = cv::getTextSize(label, cv::FONT_ITALIC, 0.4, 1, &baseline);
//image(result.box).setTo(colors[classId + classNames.size()], result.boxMask);
//cv::rectangle(image, result.box, colors[classId], 2);
cv::rectangle(image,
cv::Point(x, y), cv::Point(x2 , y2),
cv::Scalar(255, 0, 0), 1);
cv::circle(image, { (int)std::round(result.kps[0]), (int)std::round(result.kps[1]) }, 5, cv::Scalar(0, 255, 0), -1);
cv::circle(image, { (int)std::round(result.kps[2]), (int)std::round(result.kps[3]) }, 5, cv::Scalar(0, 255, 0), -1);
cv::circle(image, { (int)std::round(result.kps[4]), (int)std::round(result.kps[5]) }, 5, cv::Scalar(0, 255, 0), -1);
cv::circle(image, { (int)std::round(result.kps[6]), (int)std::round(result.kps[7]) }, 5, cv::Scalar(0, 255, 0), -1);
cv::circle(image, { (int)std::round(result.kps[8]), (int)std::round(result.kps[9]) }, 5, cv::Scalar(0, 255, 0), -1);
//cv::putText(image, label,
// cv::Point(x, y - 3 + 12), cv::FONT_ITALIC,
// 0.4, cv::Scalar(0, 0, 0), 1);
}
cv::addWeighted(im, 0.4, image, 0.6, 0, im);
}
void utils::letterbox(const cv::Mat &image, cv::Mat &outImage,
const cv::Size &newShape = cv::Size(640, 640),
const cv::Scalar &color = cv::Scalar(114, 114, 114),
bool auto_ = true,
bool scaleFill = false,
bool scaleUp = true,
int stride = 32)
{
cv::Size shape = image.size();
float r = std::min((float)newShape.height / (float)shape.height,
(float)newShape.width / (float)shape.width);
if (!scaleUp)
r = std::min(r, 1.0f);
float ratio[2]{r, r};
int newUnpad[2]{(int)std::round((float)shape.width * r),
(int)std::round((float)shape.height * r)};
auto dw = (float)(newShape.width - newUnpad[0]);
auto dh = (float)(newShape.height - newUnpad[1]);
if (auto_)
{
dw = (float)((int)dw % stride);
dh = (float)((int)dh % stride);
}
else if (scaleFill)
{
dw = 0.0f;
dh = 0.0f;
newUnpad[0] = newShape.width;
newUnpad[1] = newShape.height;
ratio[0] = (float)newShape.width / (float)shape.width;
ratio[1] = (float)newShape.height / (float)shape.height;
}
dw /= 2.0f;
dh /= 2.0f;
if (shape.width != newUnpad[0] && shape.height != newUnpad[1])
{
cv::resize(image, outImage, cv::Size(newUnpad[0], newUnpad[1]));
}
int top = int(std::round(dh - 0.1f));
int bottom = int(std::round(dh + 0.1f));
int left = int(std::round(dw - 0.1f));
int right = int(std::round(dw + 0.1f));
cv::copyMakeBorder(outImage, outImage, top, bottom, left, right, cv::BORDER_CONSTANT, color);
}
void utils::scaleCoords(cv::Rect &coords,
cv::Mat &mask,
const float maskThreshold,
const cv::Size &imageShape,
const cv::Size &imageOriginalShape,
std::vector<float>& kps)
{
float gain = std::min((float)imageShape.height / (float)imageOriginalShape.height,
(float)imageShape.width / (float)imageOriginalShape.width);
int pad[2] = {(int)(((float)imageShape.width - (float)imageOriginalShape.width * gain) / 2.0f),
(int)(((float)imageShape.height - (float)imageOriginalShape.height * gain) / 2.0f)};
coords.x = (int)std::round(((float)(coords.x - pad[0]) / gain));
coords.x = std::max(0, coords.x);
coords.y = (int)std::round(((float)(coords.y - pad[1]) / gain));
coords.y = std::max(0, coords.y);
//keypoint1
kps[0] = (int)std::round(((float)(kps[0] - pad[0]) / gain));
kps[0] = std::max(0,(int)kps[0]);
kps[1] = (int)std::round(((float)(kps[1] - pad[1]) / gain));
kps[1] = std::max(0, (int)kps[1]);
//keypoint2
kps[2] = (int)std::round(((float)(kps[2] - pad[0]) / gain));
kps[2] = std::max(0, (int)kps[2]);
kps[3] = (int)std::round(((float)(kps[3] - pad[1]) / gain));
kps[3] = std::max(0, (int)kps[3]);
//keyponit3
kps[4] = (int)std::round(((float)(kps[4] - pad[0]) / gain));
kps[4] = std::max(0, (int)kps[4]);
kps[5] = (int)std::round(((float)(kps[5] - pad[1]) / gain));
kps[5] = std::max(0, (int)kps[5]);
//keyponit4
kps[6] = (int)std::round(((float)(kps[6] - pad[0]) / gain));
kps[6] = std::max(0, (int)kps[6]);
kps[7] = (int)std::round(((float)(kps[7] - pad[1]) / gain));
kps[7] = std::max(0, (int)kps[7]);
//keyponit5
kps[8] = (int)std::round(((float)(kps[8] - pad[0]) / gain));
kps[8] = std::max(0, (int)kps[8]);
kps[9] = (int)std::round(((float)(kps[9] - pad[1]) / gain));
kps[9] = std::max(0, (int)kps[9]);
coords.width = (int)std::round(((float)coords.width / gain));
coords.width = std::min(coords.width, imageOriginalShape.width - coords.x);
coords.height = (int)std::round(((float)coords.height / gain));
coords.height = std::min(coords.height, imageOriginalShape.height - coords.y);
mask = mask(cv::Rect(pad[0], pad[1], imageShape.width - 2 * pad[0], imageShape.height - 2 * pad[1]));
//cv::resize(mask, mask, imageOriginalShape, cv::INTER_LINEAR);
//mask = mask(coords) > maskThreshold;
}
template <typename T>
T utils::clip(const T &n, const T &lower, const T &upper)
{
return std::max(lower, std::min(n, upper));
}
10.yolov8Predictor.cpp
#include "yolov8Predictor.h"
YOLOPredictor::YOLOPredictor(const std::string &modelPath,
const bool &isGPU,
float confThreshold,
float iouThreshold,
float maskThreshold)
{
this->confThreshold = confThreshold;
this->iouThreshold = iouThreshold;
this->maskThreshold = maskThreshold;
env = Ort::Env(OrtLoggingLevel::ORT_LOGGING_LEVEL_WARNING, "YOLOV8");
sessionOptions = Ort::SessionOptions();
std::vector<std::string> availableProviders = Ort::GetAvailableProviders();
auto cudaAvailable = std::find(availableProviders.begin(), availableProviders.end(), "CUDAExecutionProvider");
OrtCUDAProviderOptions cudaOption;
if (isGPU && (cudaAvailable == availableProviders.end()))
{
std::cout << "GPU is not supported by your ONNXRuntime build. Fallback to CPU." << std::endl;
std::cout << "Inference device: CPU" << std::endl;
}
else if (isGPU && (cudaAvailable != availableProviders.end()))
{
std::cout << "Inference device: GPU" << std::endl;
sessionOptions.AppendExecutionProvider_CUDA(cudaOption);
}
else
{
std::cout << "Inference device: CPU" << std::endl;
}
#ifdef _WIN32
std::wstring w_modelPath = utils::charToWstring(modelPath.c_str());
session = Ort::Session(env, w_modelPath.c_str(), sessionOptions);
#else
session = Ort::Session(env, modelPath.c_str(), sessionOptions);
#endif
const size_t num_input_nodes = session.GetInputCount(); //==1
const size_t num_output_nodes = session.GetOutputCount(); //==1,2
if (num_output_nodes > 1)
{
this->hasMask = true;
std::cout << "Instance Segmentation" << std::endl;
}
else
std::cout << "Object Detection" << std::endl;
Ort::AllocatorWithDefaultOptions allocator;
for (int i = 0; i < num_input_nodes; i++)
{
auto input_name = session.GetInputNameAllocated(i, allocator);
this->inputNames.push_back(input_name.get());
input_names_ptr.push_back(std::move(input_name));
Ort::TypeInfo inputTypeInfo = session.GetInputTypeInfo(i);
std::vector<int64_t> inputTensorShape = inputTypeInfo.GetTensorTypeAndShapeInfo().GetShape();
this->inputShapes.push_back(inputTensorShape);
this->isDynamicInputShape = false;
// checking if width and height are dynamic
if (inputTensorShape[2] == -1 && inputTensorShape[3] == -1)
{
std::cout << "Dynamic input shape" << std::endl;
this->isDynamicInputShape = true;
}
}
for (int i = 0; i < num_output_nodes; i++)
{
auto output_name = session.GetOutputNameAllocated(i, allocator);
this->outputNames.push_back(output_name.get());
output_names_ptr.push_back(std::move(output_name));
Ort::TypeInfo outputTypeInfo = session.GetOutputTypeInfo(i);
std::vector<int64_t> outputTensorShape = outputTypeInfo.GetTensorTypeAndShapeInfo().GetShape();
this->outputShapes.push_back(outputTensorShape);
if (i == 0)
{
if (!this->hasMask)
classNums = outputTensorShape[1] - 4 - 17*3;
else
classNums = outputTensorShape[1] - 4 - 32;
}
}
// for (const char *x : this->inputNames)
// {
// std::cout << x << std::endl;
// }
// for (const char *x : this->outputNames)
// {
// std::cout << x << std::endl;
// }
// std::cout << classNums << std::endl;
}
void YOLOPredictor::getBestClassInfo(std::vector<float>::iterator it,
float &bestConf,
int &bestClassId,
const int _classNums)
{
// first 4 element are box
bestClassId = 4;
bestConf = 0;
for (int i = 4; i < _classNums + 4; i++)
{
if (it[i] > bestConf)
{
bestConf = it[i];
bestClassId = i - 4;
}
}
}
cv::Mat YOLOPredictor::getMask(const cv::Mat &maskProposals,
const cv::Mat &maskProtos)
{
cv::Mat protos = maskProtos.reshape(0, {(int)this->outputShapes[1][1], (int)this->outputShapes[1][2] * (int)this->outputShapes[1][3]});
cv::Mat matmul_res = (maskProposals * protos).t();
cv::Mat masks = matmul_res.reshape(1, {(int)this->outputShapes[1][2], (int)this->outputShapes[1][3]});
cv::Mat dest;
// sigmoid
cv::exp(-masks, dest);
dest = 1.0 / (1.0 + dest);
cv::resize(dest, dest, cv::Size((int)this->inputShapes[0][2], (int)this->inputShapes[0][3]), cv::INTER_LINEAR);
return dest;
}
void YOLOPredictor::preprocessing(cv::Mat &image, float *&blob, std::vector<int64_t> &inputTensorShape)
{
cv::Mat resizedImage, floatImage;
cv::cvtColor(image, resizedImage, cv::COLOR_BGR2RGB);
utils::letterbox(resizedImage, resizedImage, cv::Size((int)this->inputShapes[0][2], (int)this->inputShapes[0][3]),
cv::Scalar(114, 114, 114), this->isDynamicInputShape,
false, true, 32);
inputTensorShape[2] = resizedImage.rows;
inputTensorShape[3] = resizedImage.cols;
resizedImage.convertTo(floatImage, CV_32FC3, 1 / 255.0);
blob = new float[floatImage.cols * floatImage.rows * floatImage.channels()];
cv::Size floatImageSize{floatImage.cols, floatImage.rows};
// hwc -> chw
std::vector<cv::Mat> chw(floatImage.channels());
for (int i = 0; i < floatImage.channels(); ++i)
{
chw[i] = cv::Mat(floatImageSize, CV_32FC1, blob + i * floatImageSize.width * floatImageSize.height);
}
cv::split(floatImage, chw);
}
std::vector<Yolov8Result> YOLOPredictor::postprocessing(const cv::Size &resizedImageShape,
const cv::Size &originalImageShape,
std::vector<Ort::Value> &outputTensors)
{
// for box
std::vector<cv::Rect> boxes;
std::vector<float> confs;
std::vector<int> classIds;
std::vector<std::vector<float>> kpss;
float *boxOutput = outputTensors[0].GetTensorMutableData<float>();
//[1,4+n,8400]=>[1,8400,4+n] or [1,4+n+32,8400]=>[1,8400,4+n+32]
cv::Mat output0 = cv::Mat(cv::Size((int)this->outputShapes[0][2], (int)this->outputShapes[0][1]), CV_32F, boxOutput).t();
float *output0ptr = (float *)output0.data;
int rows = (int)this->outputShapes[0][2];
int cols = (int)this->outputShapes[0][1];
// std::cout << rows << cols << std::endl;
// if hasMask
std::vector<std::vector<float>> picked_proposals;
cv::Mat mask_protos;
for (int i = 0; i < rows; i++)
{
std::vector<float> it(output0ptr + i * cols, output0ptr + (i + 1) * cols);
float confidence;
int classId;
this->getBestClassInfo(it.begin(), confidence, classId, classNums);
if (confidence > this->confThreshold)
{
std::vector<float> kps;
if (this->hasMask)
{
std::vector<float> temp(it.begin() + 4 + classNums, it.end());
picked_proposals.push_back(temp);
}
int centerX = (int)(it[0]);
int centerY = (int)(it[1]);
int width = (int)(it[2]);
int height = (int)(it[3]);
int left = centerX - width / 2;
int top = centerY - height / 2;
boxes.emplace_back(left, top, width, height);
confs.emplace_back(confidence);
classIds.emplace_back(classId);
//keypoint1
kps.emplace_back(it[5]);
kps.emplace_back(it[6]);
//keypoint2
kps.emplace_back(it[8]);
kps.emplace_back(it[9]);
//keypoint3
kps.emplace_back(it[11]);
kps.emplace_back(it[12]);
//keypoint4
kps.emplace_back(it[14]);
kps.emplace_back(it[15]);
//keypoint5
kps.emplace_back(it[17]);
kps.emplace_back(it[18]);
kpss.emplace_back(kps);
}
}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confs, this->confThreshold, this->iouThreshold, indices);
if (this->hasMask)
{
float *maskOutput = outputTensors[1].GetTensorMutableData<float>();
std::vector<int> mask_protos_shape = {1, (int)this->outputShapes[1][1], (int)this->outputShapes[1][2], (int)this->outputShapes[1][3]};
mask_protos = cv::Mat(mask_protos_shape, CV_32F, maskOutput);
}
std::vector<Yolov8Result> results;
for (int idx : indices)
{
Yolov8Result res;
res.box = cv::Rect(boxes[idx]);
if (this->hasMask)
res.boxMask = this->getMask(cv::Mat(picked_proposals[idx]).t(), mask_protos);
else
res.boxMask = cv::Mat::zeros((int)this->inputShapes[0][2], (int)this->inputShapes[0][3], CV_8U);
res.kps = kpss[idx];
utils::scaleCoords(res.box, res.boxMask, this->maskThreshold, resizedImageShape, originalImageShape, res.kps);
res.conf = confs[idx];
res.classId = classIds[idx];
results.emplace_back(res);
}
return results;
}
std::vector<Yolov8Result> YOLOPredictor::predict(cv::Mat &image)
{
float *blob = nullptr;
std::vector<int64_t> inputTensorShape{1, 3, -1, -1};
this->preprocessing(image, blob, inputTensorShape);
size_t inputTensorSize = utils::vectorProduct(inputTensorShape);
std::vector<float> inputTensorValues(blob, blob + inputTensorSize);
std::vector<Ort::Value> inputTensors;
Ort::MemoryInfo memoryInfo = Ort::MemoryInfo::CreateCpu(
OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault);
inputTensors.push_back(Ort::Value::CreateTensor<float>(
memoryInfo, inputTensorValues.data(), inputTensorSize,
inputTensorShape.data(), inputTensorShape.size()));
std::vector<Ort::Value> outputTensors = this->session.Run(Ort::RunOptions{nullptr},
this->inputNames.data(),
inputTensors.data(),
1,
this->outputNames.data(),
this->outputNames.size());
cv::Size resizedShape = cv::Size((int)inputTensorShape[3], (int)inputTensorShape[2]);
std::vector<Yolov8Result> result = this->postprocessing(resizedShape,
image.size(),
outputTensors);
delete[] blob;
return result;
}
注:原始的目标检测代码来自网上,在此基础上增加关键点检测代码。
文章来源:https://blog.csdn.net/huzhifei/article/details/135275638
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!