jeston xavier nx跑通vins-fusion GPU定位的ego_planner
发布时间:2024年01月09日
1.ROS安装
鱼香ROS一键安装
wget http://fishros.com/install -O fishros && . fishros
安装ROS和Linux下的QQ
问题
1.QQ使用遇到后台没有图标找不到的问题
快捷键
Ctrl +Alt+x
切出后台
2. jeston xavier nx下输入法安装(谷歌输入法)
参考链接(包括一些系统设置)
2.realsense驱动安装
按照高飞课程的readme.pdf里执行的
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
问题
1.执行完
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
第一个链接忽略了
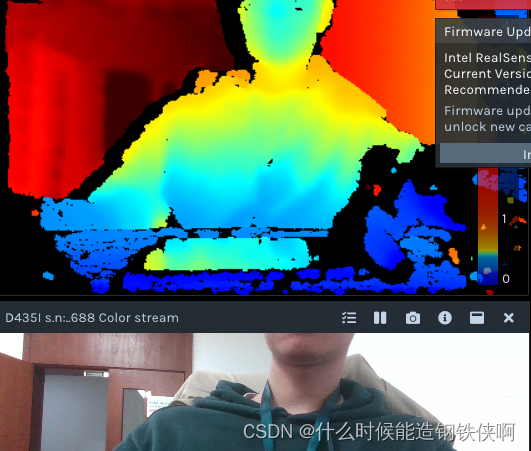
2.无法定位软件包 librealsense2-dkms ,但是测试没有问题
sudo apt-get install librealsense2-dkms
出现 E: 无法定位软件包 librealsense2-dkms 的问题 ,但是我插上双目可以有深度和RGB图像
测试
测试: realsense-viewer
3.安装mavros
sudo apt-get install ros-melodic-mavros
cd /opt/ros/melodic/lib/mavros
sudo ./install_geographiclib_datasets.sh
4.Cuda 10.2的安装
sudo apt-get update
sudo apt-get install cuda-toolkit-10-2
安装好之后,在 .bashrc中配置环境变量。 source ~/.bashrc //使环境变量立即生效之后,nvcc -- version 即可查看cuda版本。
export PATH=/usr/local/cuda-10.2/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64:$LD_LIBRARY_PATH
export CUDA_ROOT=/usr/local/cuda
5.Eigen安装
卸载掉ROS自带的Eigen,安装3.3.7版本
# Remove pre-built Eigen
sudo apt-get remove libeigen3-dev
cd ~/Downloads/
wget -O eigen.zip https://gitlab.com/libeigen/eigen/-/archive/3.3.7/eigen-3.3.7.zip #check version
unzip eigen.zip
mkdir eigen-build && cd eigen-build
cmake ../eigen-3.3.7/ && sudo make install
pkg-config
文章来源:https://blog.csdn.net/weixin_45438628/article/details/135291483
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- LeetCode 31. 下一个排列
- app定制流程
- 【GitHub项目推荐--推荐 5 个炫炫炫的可视化项目】【转载】
- 第79讲: MySQL Binlog二进制日志恢复误删数据的实践指南
- SpringCloud(17~21章):Alibaba入门简介、Nacos服务注册和配置中心、Sentinel实现熔断与限流、Seata处理分布式事务
- 机器学习的算法简单介绍-随机森林算法
- KEPServerEX 6 之【外篇-3】PTC-ThingWorx服务端软件安装 Thingworx 完整版
- Postgresql中PL/pgSQL代码块的语法与使用-声明与赋值、IF语句、CASE语句、循环语句
- 首次使用 git 配置 github,gitee 密钥
- MURF10100AC-ASEMI新能源功率器件MURF10100AC