多模态融合slam技术学习
发布时间:2023年12月18日
目录
前言
最近在找实习,又想着要怎么完成毕业论文,打算做下机器人导航实验,学习下相关算法。今天是多模态融合slam技术,课程链接:https://www.bilibili.com/video/BV1YP4y1b7X2?vd_source=70cd9a7d58eaf79ee46e9bddc1d0d53e(41min左右开始推课了,不感兴趣的别看)
slam是同时定位和建图,很重要,要学习。
机器人导航系统框架:

?
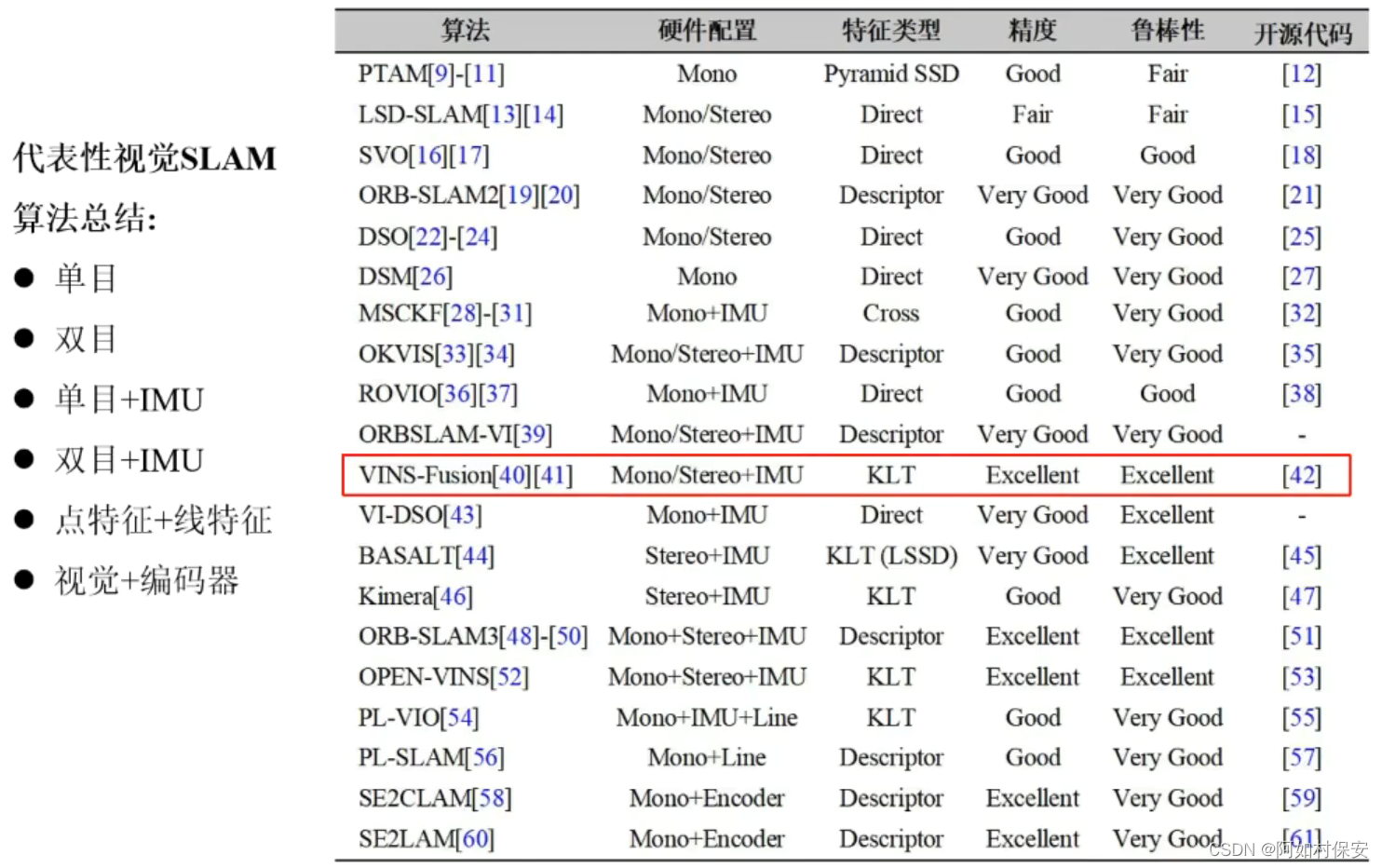
一、视觉-惯性SLAM算法?






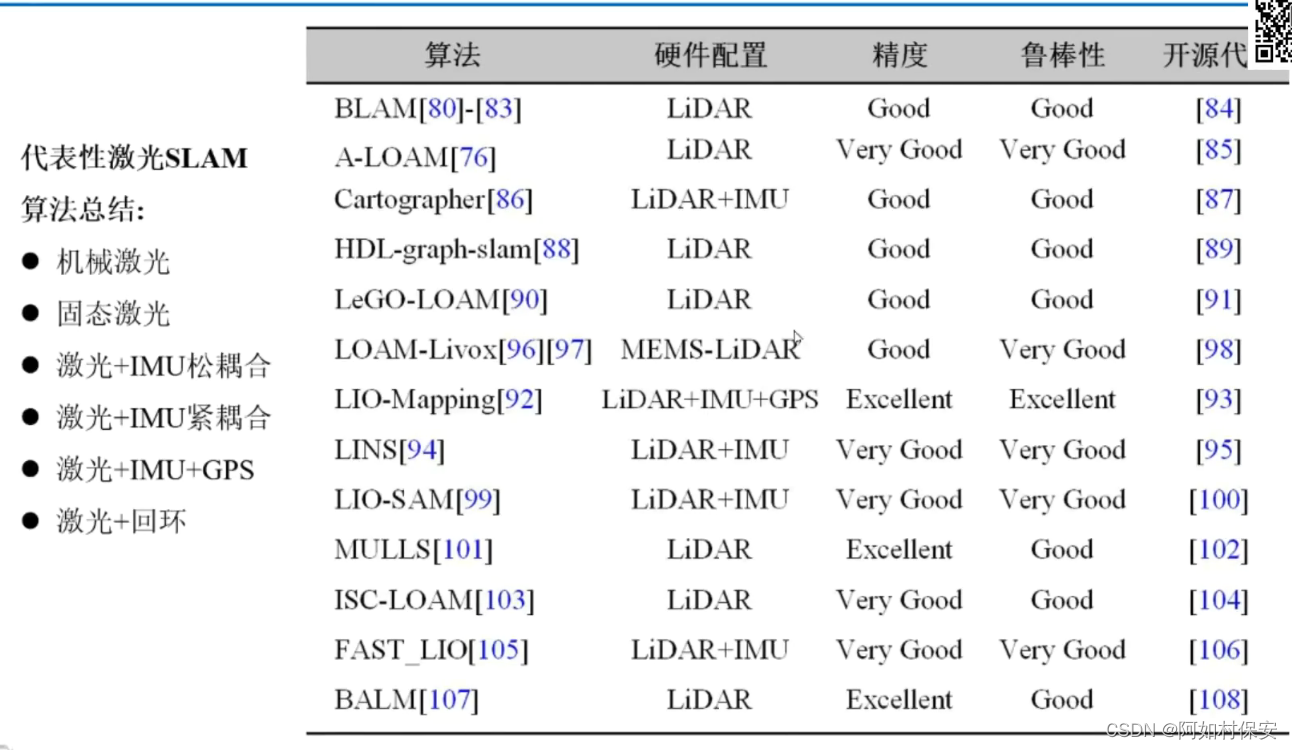
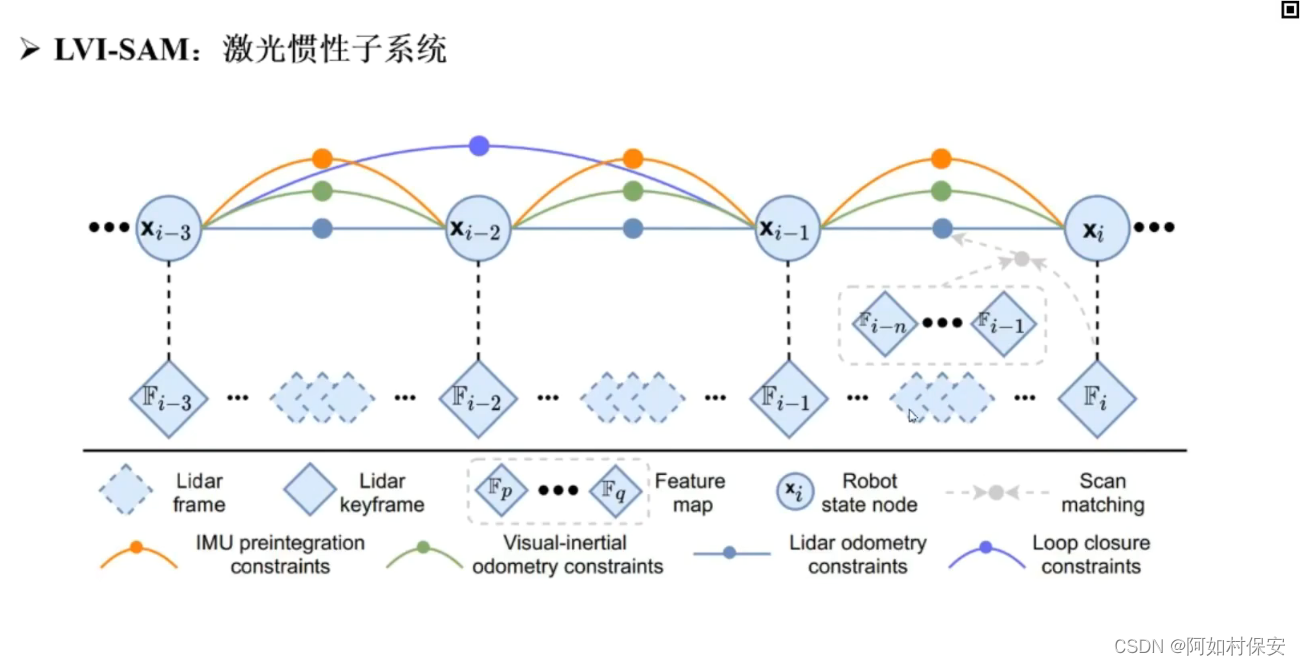
二、激光-惯性SLAM算法







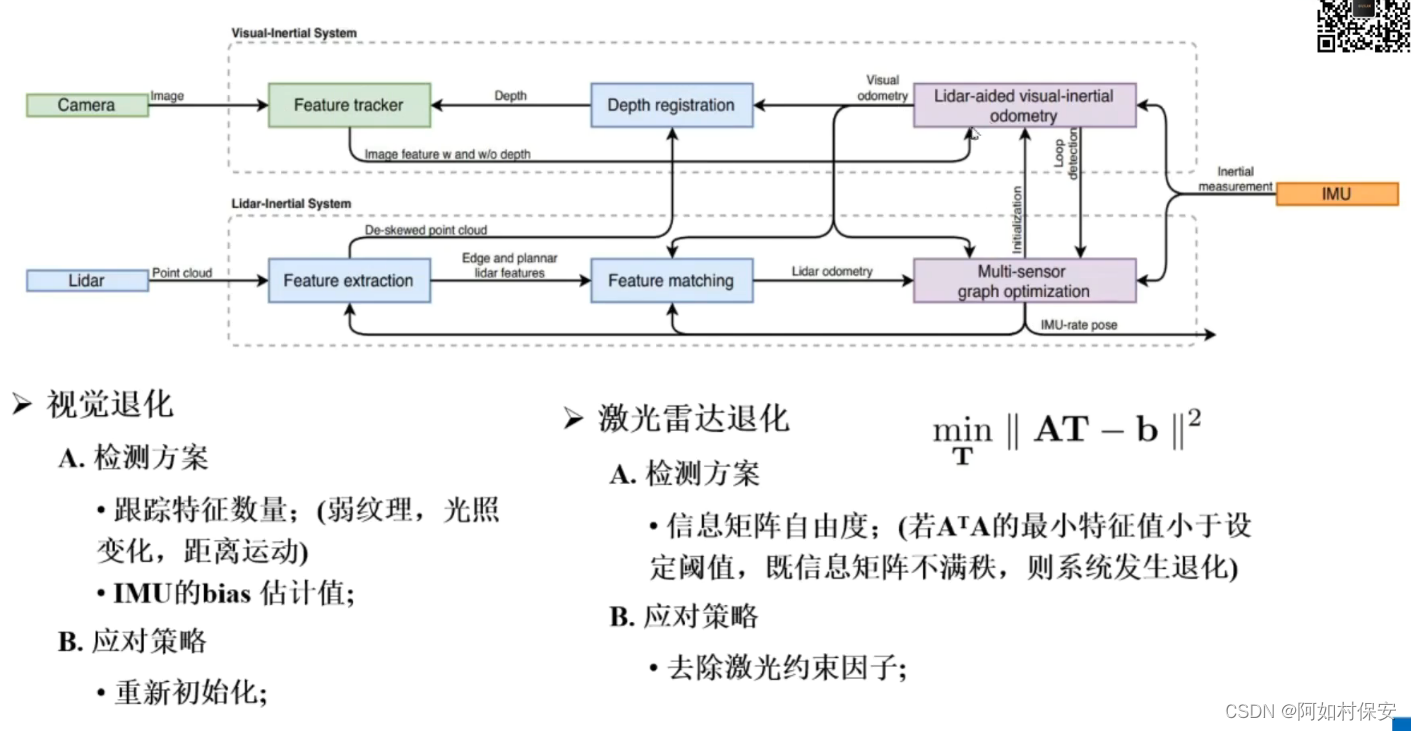
三、激光与视觉融合算法



总结
很浅的了解了一下,之后一个一个学习吧。
文章来源:https://blog.csdn.net/m0_66076989/article/details/134970425
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 基于Java+SpringBoot+Vue3+Uniapp前后端分离考试学习一体机设计与实现企业级2.20版本(视频讲解,已发布上线)
- vue 全局定时更新 轮询
- Rxjava链式调用解析
- 【在GitHub上搜索】
- HCIA-Datacom题库(自己整理分类的)_12_其他网络协议多选【12道题】
- 2023年12月21日开发正式版v1.2.3更新·本次更新30多个细节优化·完善丰富后台功能·加入演员关联机制
- “重启”人生:长期型人工心脏的神奇疗效
- Qt-setIcon无法加载图片为图标
- 【MySQL】表设计与范式设计
- Go Channel 详解