ROS软件包使用:使用rqt_robot_steering软件包控制ROS小乌龟移动速度
发布时间:2023年12月22日
前言
使用rqt_robot_steering软件包控制ros小乌龟移动速度
一、打开终端
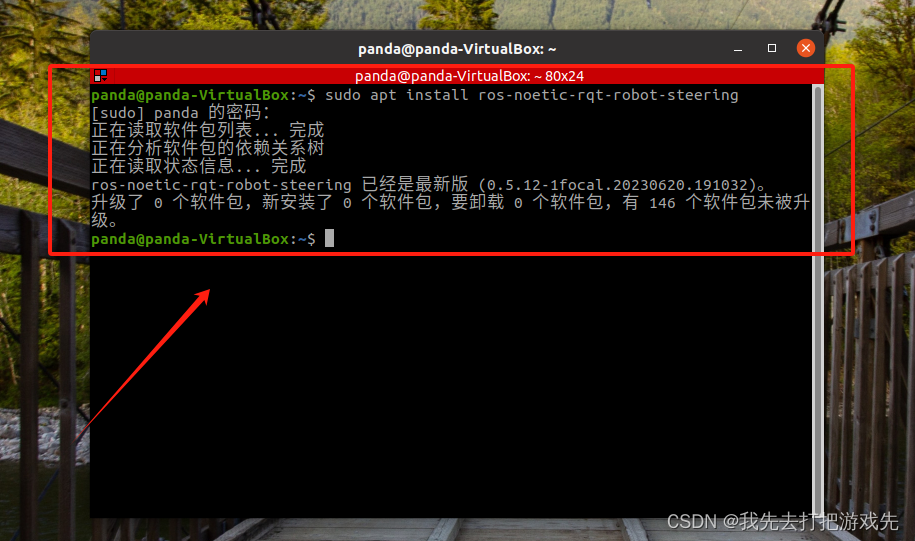
二、输入sudo apt install ros-noetic-rqt-robot-steering,然后回车,输入管理员密码,然后回车,软件包安装成功(图示是已安装过)
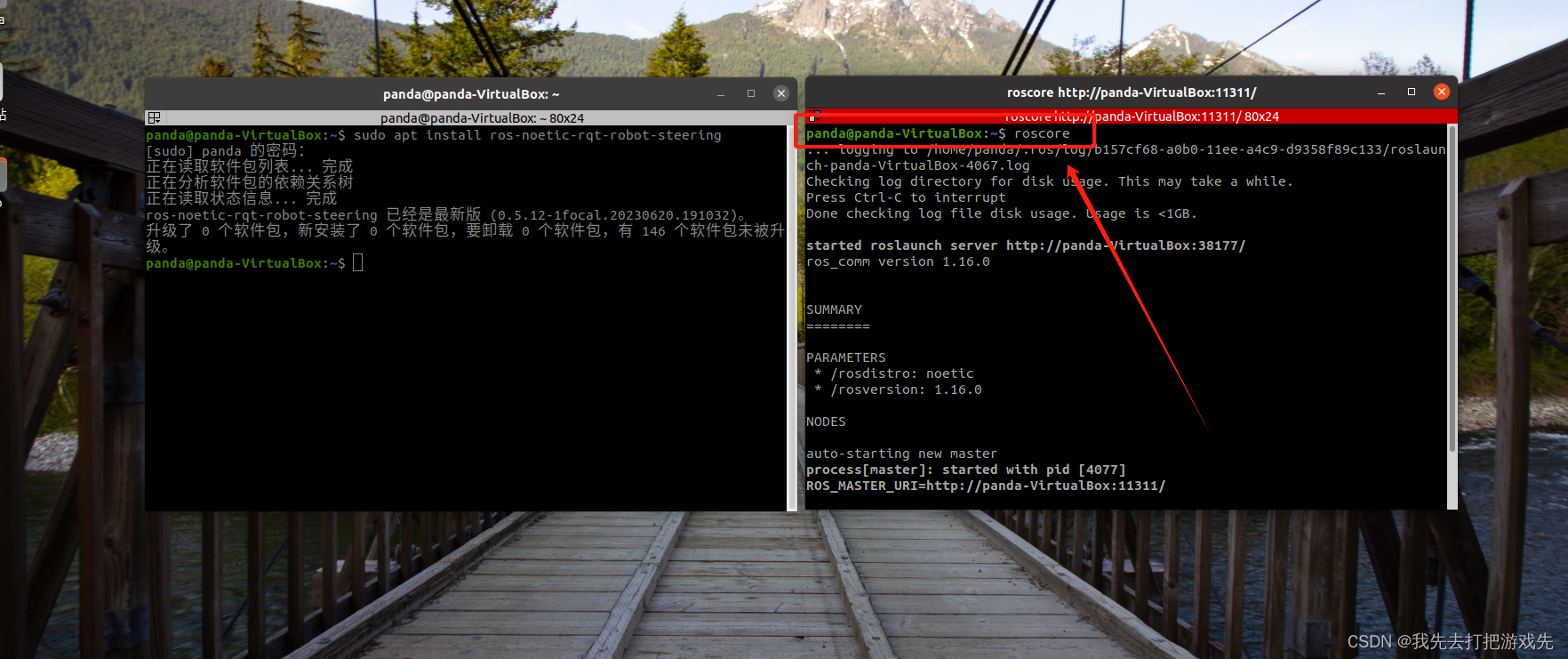
三、另开一个终端,输入roscore,启动ROS核心
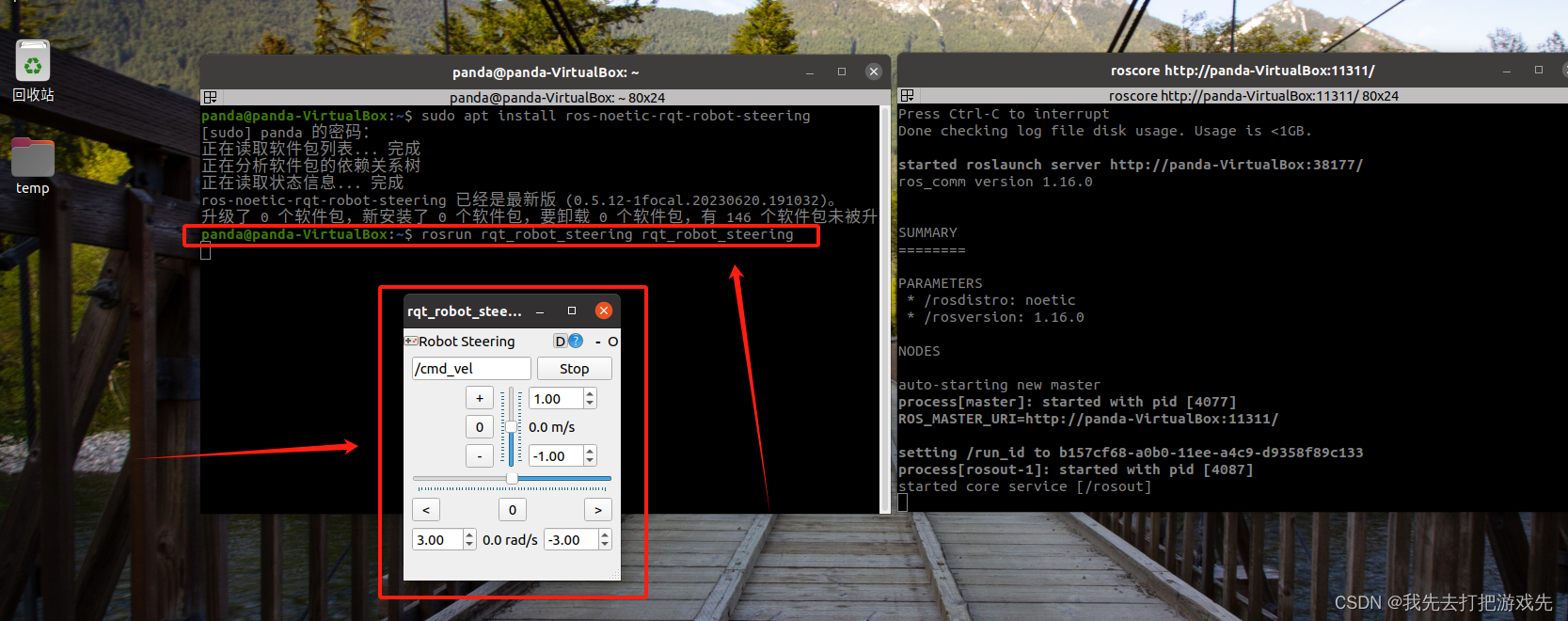
四、回到刚刚第一个下载软件包的终端,输入rosrun rqt_robot_steering rqt_robot_steering,回车后就会弹出一个软件
五、再开另一个终端,输入sudo apt install ros-noetic-turtlesim安装小乌龟,我这里是已安装过
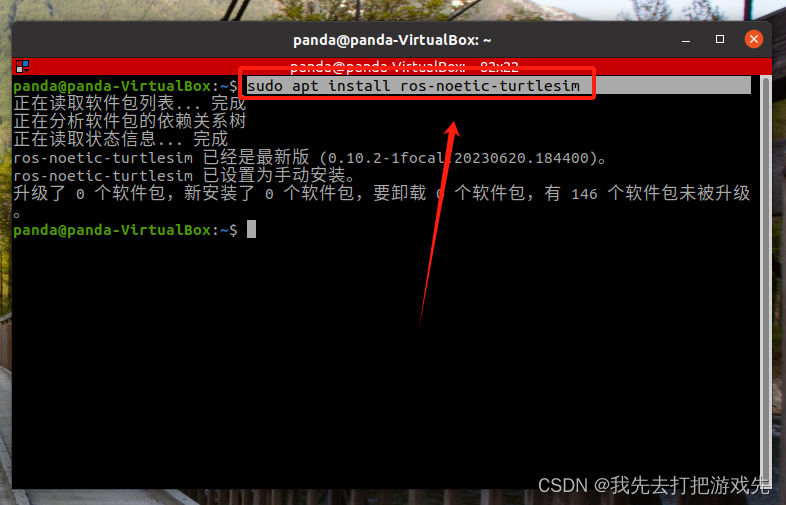
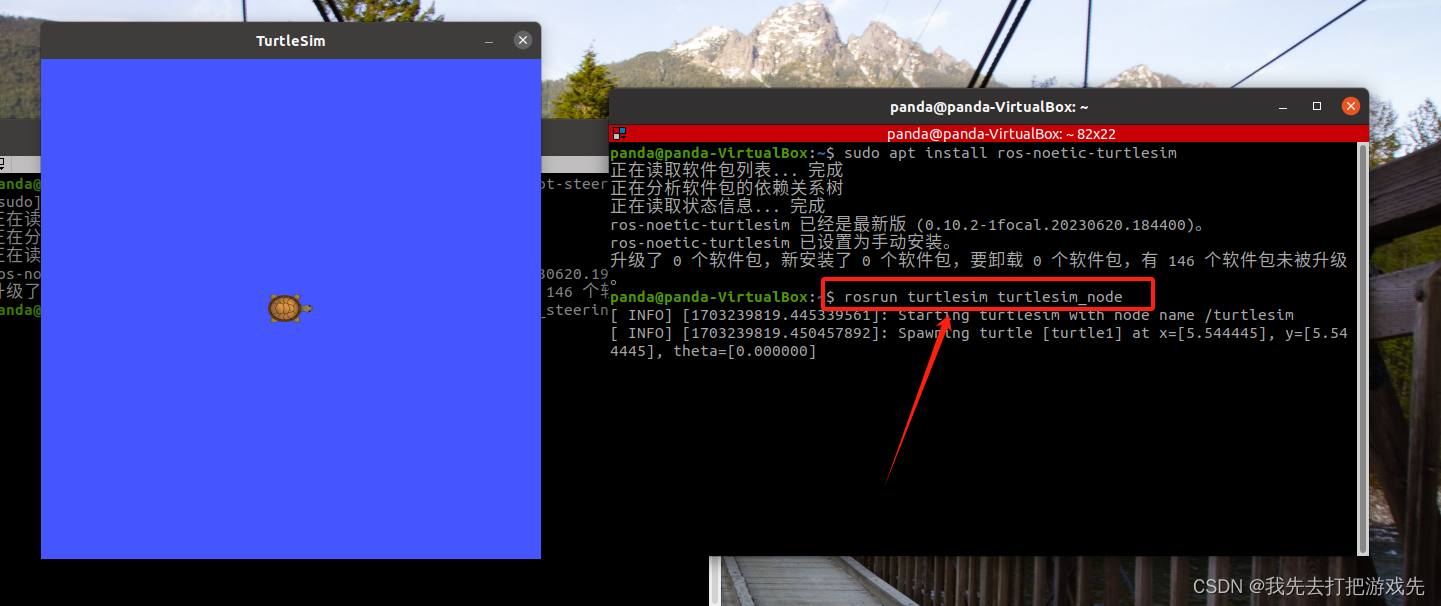
六、在刚刚安装小乌龟的那个终端输入rosrun turtlesim turtlesim_node,回车后就会弹出小乌龟的窗口
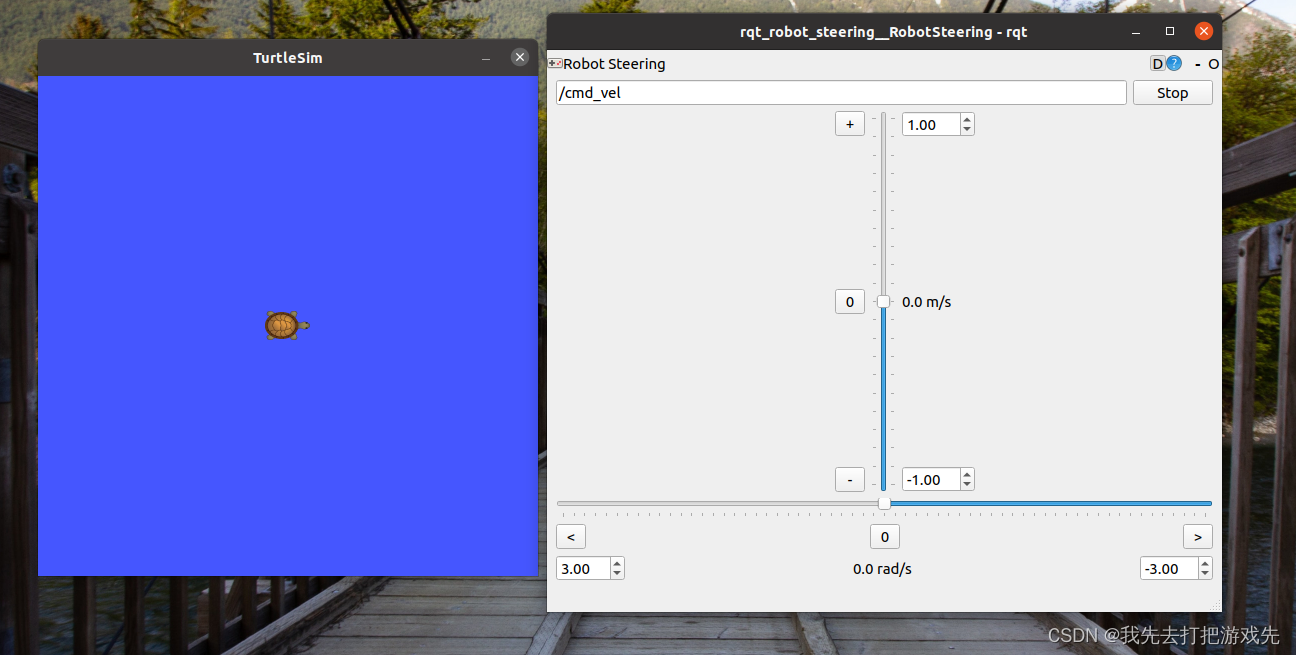
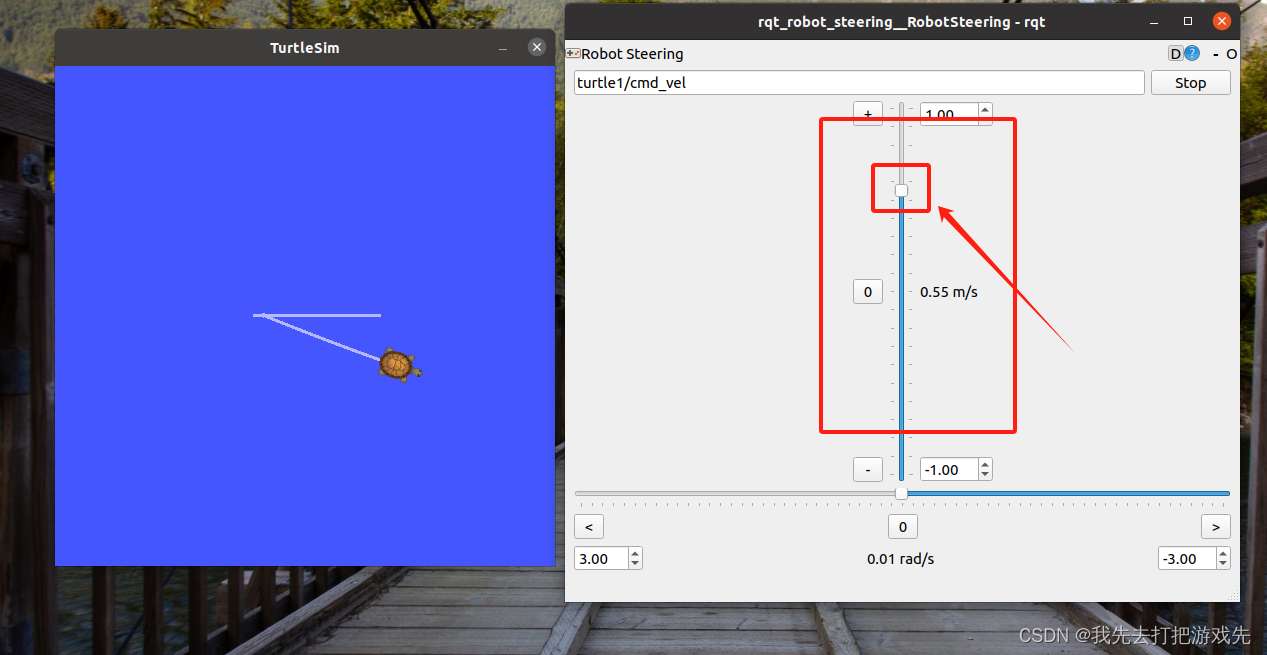
七、这是我们前面打开的了两个软件,左边是小乌龟,右边是控制小乌龟速度的软件
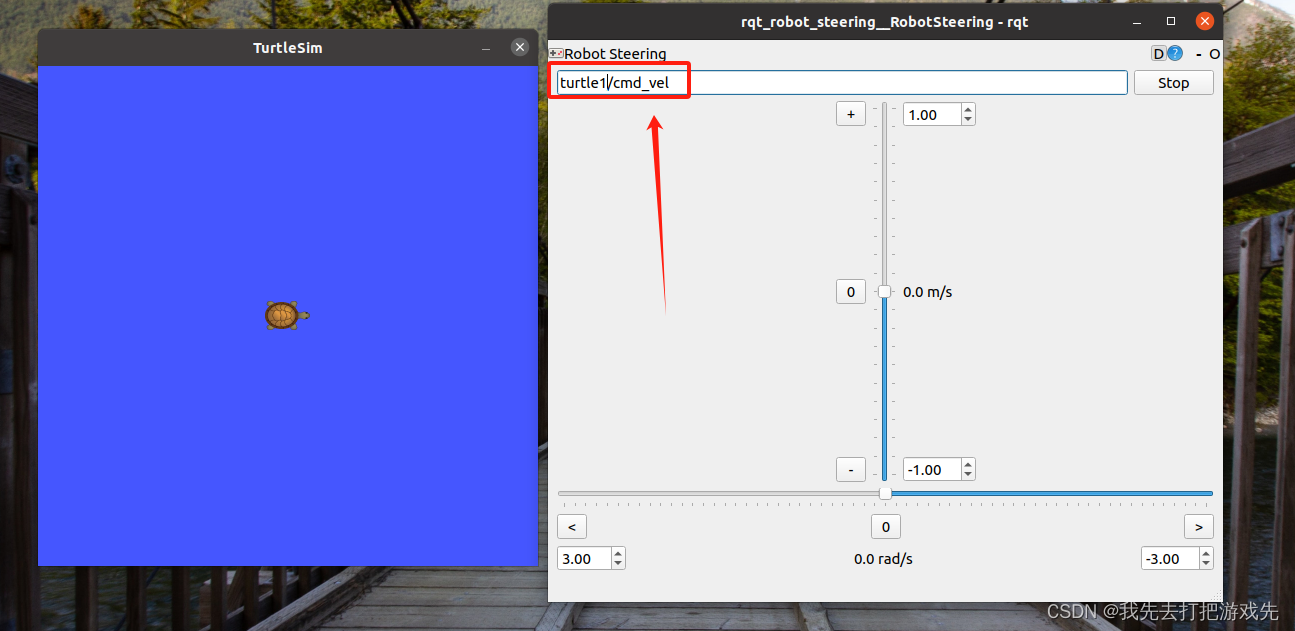
八、修改一下速度发送的主题名称,在前面加了个turtle1
九、拖动这个摇杆,小乌龟前后动
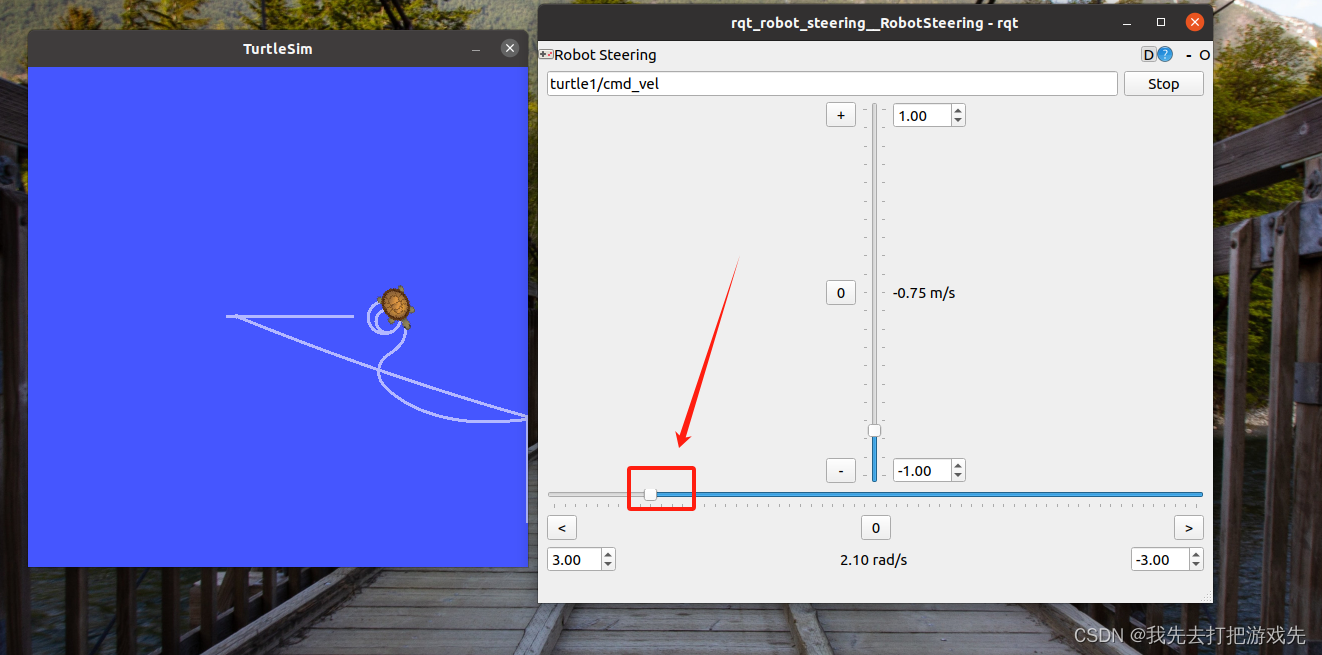
十、拖动这个摇杆,小乌龟能转圈圈
文章来源:https://blog.csdn.net/qq_52251819/article/details/135146923
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 让生活更智能,P1600边缘智能网关带你进入智能家居新时代
- 有没有好用的视频提取文案工具推荐?
- 2023-强网杯-【强网先锋-ez_fmt】
- 了解DC电源模块的基本参数及选择方法
- 前端开发之通过vue-office组件实现文件预览
- 常用的sql语句汇总(个人版)
- 见鬼了,百度接口查询行政区划查出3个澳门了!!!
- jQuery :nth-of-type(n)选择器的用法详解
- 项目整合管理-8.5监控项目工作
- 【Bug修复】秒杀服务器异常,轻松恢复网站访问--从防火墙到Docker服务的全面解析