模板匹配方法
发布时间:2023年12月30日
模板匹配
类似于卷积,模板在原图像上从原点进行滑动,计算模板与原图像被覆盖的地方的差别程度,共用6种计算方法,将每次计算的结果放到一个矩阵里,作为结果输出。
假如原图像大小为AxB,模板为axb,则输出结果的矩阵大小为(A-a+1,B-b+1)
方法:
cv2.TM_SQDIFF:计算平方不同,结果越小越相关。
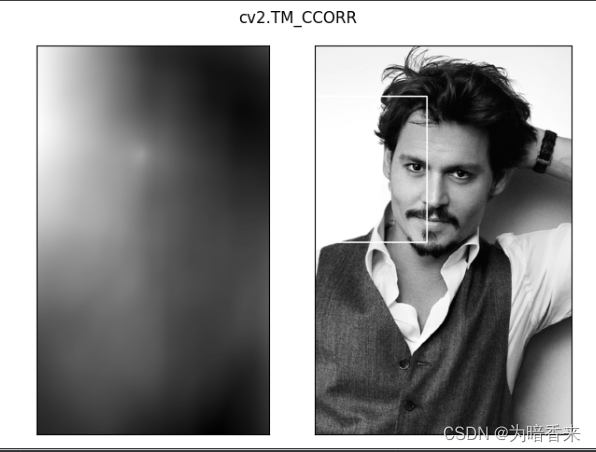
cv2.TM_CCORR:计算相关性,结果越大越相关。
cv2.TM_CCOEFF:计算相关系数,结果越大越相关。
cv2.TM_SQDIFF_NORMED:计算归一化平方不同,结果越接近0越相关。
cv2.TM_CCORR_NORMED:计算归一化相关性,结果越接近1越相关。
cv2.TM_CCOEFF_NORMED:计算归一化相关系数,结果越接近1越相关。
读图像与模板并计算模板长于宽
deppb = cv2.imread('deppb.jpg', 0)
deppl = cv2.imread('deppl.png', 0)
h, w = deppl.shape[: 2]
输出图像与模板的大小
print(deppb.shape)
print(deppl.shape)
六种方法
methods = {'cv2.TM_CCOEFF', 'cv2.TM_CCOEFF_NORMED', 'cv2.TM_CCORR', 'cv2.TM_CCORR_NORMED', 'cv2.TM_SQDIFF', 'cv2.TM_SQDIFF_NORMED'}
for meth in methods:
deppb2 = deppb.copy()
# 匹配方法的真值
method = eval(meth)
print(method)
res = cv2.matchTemplate(deppb, deppl, method) # 模板匹配
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
# 如果方法为平方差匹配cv2.TM_SQDIFF或归一化匹配cv2.TM_SQDIFF_NORMED则取最小值
if method in [cv2.TM_SQDIFF, cv2.TM_SQDIFF_NORMED]:
top_left = min_loc
else:
top_left = max_loc
bottom_right = (top_left[0] + w, top_left[1] + h)
# 画矩形
cv2.rectangle(deppb2, top_left, bottom_right, 255, 2)
plt.subplot(121), plt.imshow(res, cmap='gray')
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.subplot(122), plt.imshow(deppb2, cmap='gray')
plt.xticks([]), plt.yticks([])
plt.suptitle(meth) # 表头
plt.show()
结果
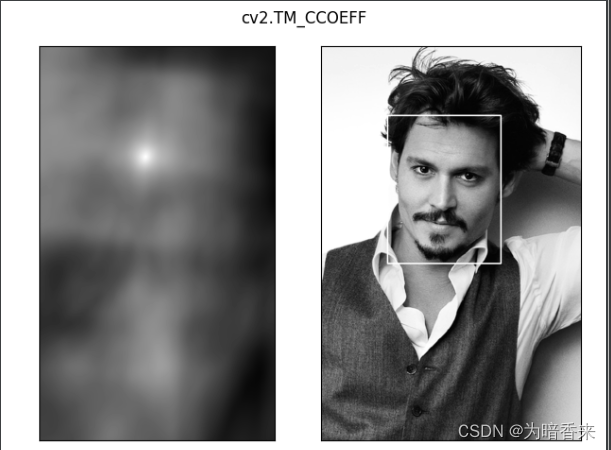
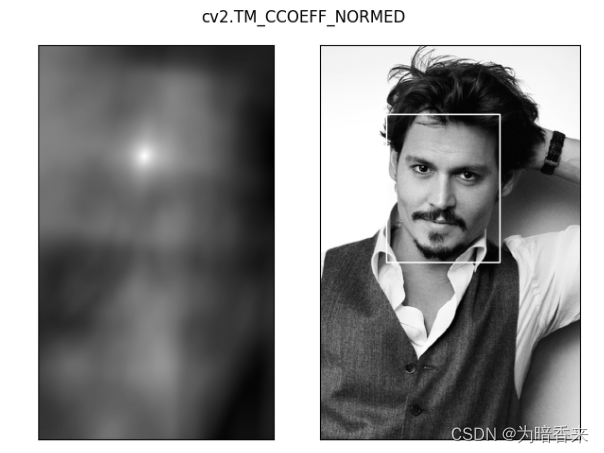
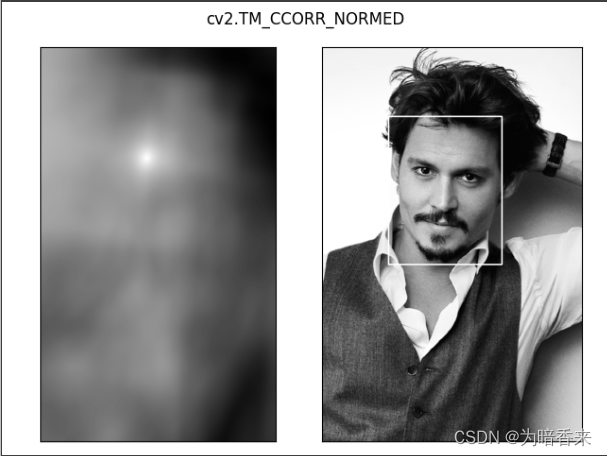
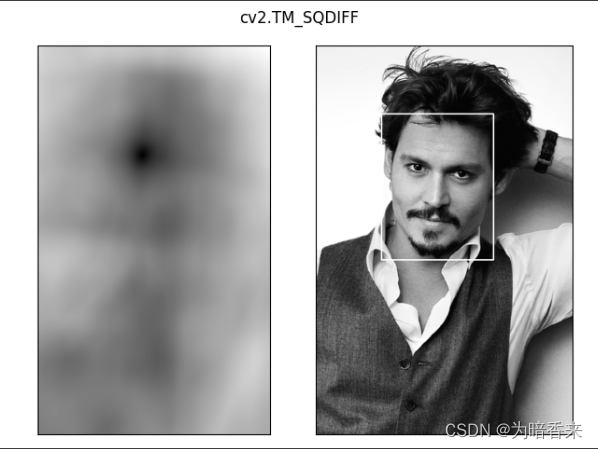
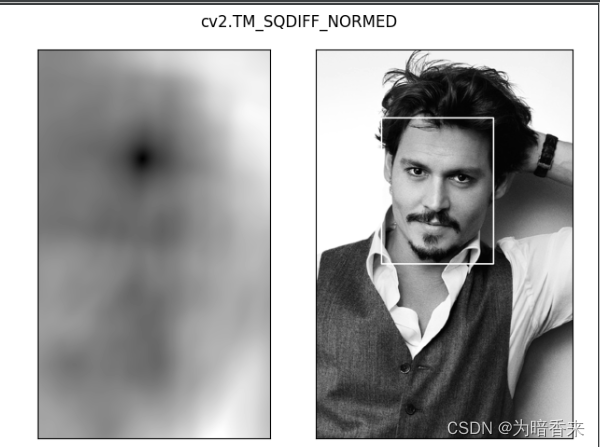
可以看出如果方法为平方差匹配cv2.TM_SQDIFF或归一化匹配cv2.TM_SQDIFF_NORMED则取最小值,最相关的位置最黑。
cv2.TM_CCORR方法较不理想。
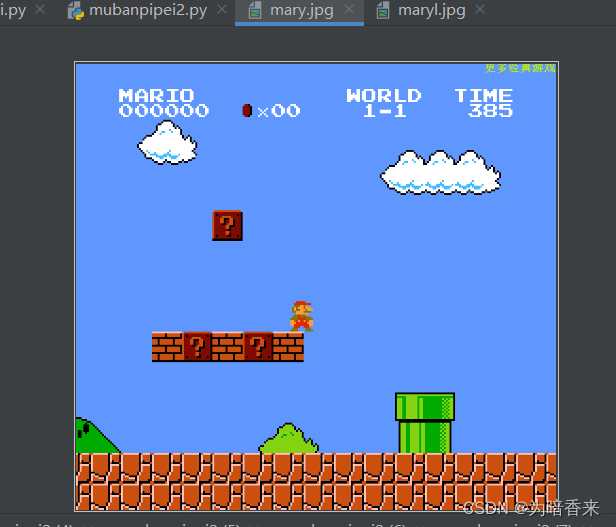
匹配多个对象
在图mary中找到砖块maryl
maryl
img_rgb = cv2.imread('mary.jpg')
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
template = cv2.imread('maryl.jpg', 0)
h, w = template.shape[:2]
res = cv2.matchTemplate(img_gray, template, cv2.TM_CCOEFF_NORMED)
yuzhi = 0.78
# 取匹配度大于78%的坐标
loc = np.where(res >= yuzhi)
for pt in zip(*loc[::-1]):
bottom_right = (pt[0] + w, pt[1] + h)
cv2.rectangle(img_rgb, pt, bottom_right, (150, 255, 10), 2)
cv2.imshow('img_rgb', img_rgb)
cv2.waitKey(0)
结果

文章来源:https://blog.csdn.net/lsh2678227571/article/details/135270970
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Navicat 16 for MySQL:打造高效数据库开发管理工具
- Likeshop单商户高级版商城的二次开发之路
- QT6.3学习技巧,快速入门
- 机器学习笔记 - 时间序列分析基础概念解释
- 民安智库(第三方公众满意度调查):物业满意度调查问卷调查实施中,关键问题不容忽视
- 闭包 闭包理解 闭包的应用实例
- 0基础如何使用全功能的Python测试框架?
- 【案例】注册表简介,新建一个右键菜单打开方式选项
- [NOIP2009 普及组] 多项式输出#洛谷
- 3行Python代码即可将视频转Gif