毫米波雷达4D点云生成(基于实测数据)
发布时间:2024年01月20日
本期文章分享TI毫米波雷达实测4D点云生成的代码,包含距离、速度、水平角度、俯仰角度,可用于日常学习。
处理流程包含:数据读取和解析、MTI、距离估计、速度估计、非相干累积、2D-CFAR、水平角估计、俯仰角估计、点云生成、坐标转换等内容。
雷达天线布局如下所示:

本代码以IWR6843为例,目标是行人,后续,可以修改用于1243、1443、1843等型号的雷达。
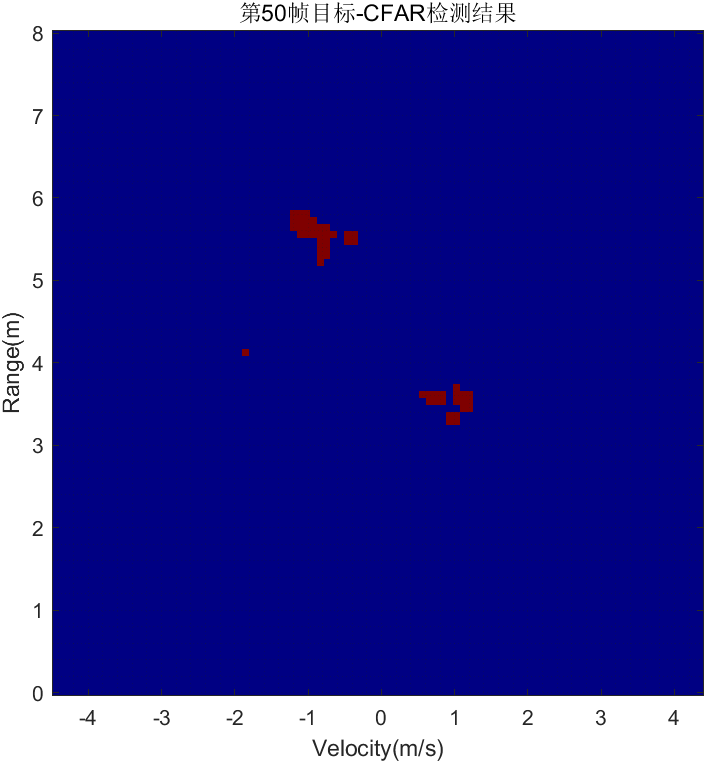
CFAR检测结果如下,这里采集的数据是两个行人目标,CFAR显示的结果比较好:
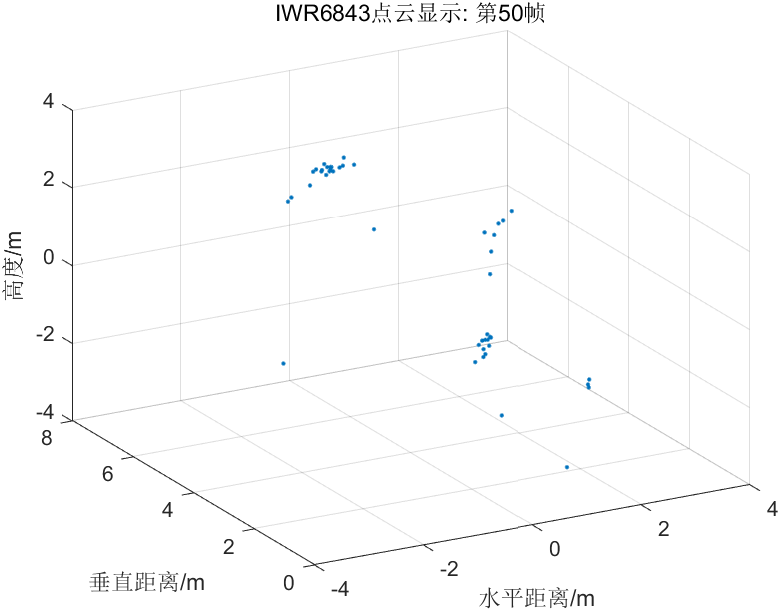
4D点云显示结果如下:
点云显示域坐标转换部分代码:
%% 4D点云生成
disp(strcat(['=====','点云生成','=====']));
pcd_x = targetPerFrame.rangeSet .* cosd(targetPerFrame.elevationSet) .* sind(targetPerFrame.azimuthSet);
pcd_y = targetPerFrame.rangeSet .* cosd(targetPerFrame.elevationSet) .* cosd(targetPerFrame.azimuthSet);
pcd_z = targetPerFrame.rangeSet .* sind(targetPerFrame.elevationSet);
figure(1);
plot3(pcd_x,pcd_y,pcd_z,'.');
xlabel('水平距离/m');ylabel('垂直距离/m');zlabel('高度/m');title(['IWR6843点云显示: 第',num2str(frame_id),'帧']);grid on
xlim([-4,4]);ylim([0,8]);zlim([-4,4])
view([-80,-80,60]);
代码和数据下载链接:https://mbd.pub/o/bread/ZZqUkp1q
文章来源:https://blog.csdn.net/qq_35844208/article/details/135720320
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 【C语言_题库】粗语言—— sum=1/2+2/3+3/5,编写一个C语言程序:求S=1/1+1/2+1/3+…+1/n
- 代码随想录算法训练营第47天|● 198.打家劫舍 ● 213.打家劫舍II ● 337.打家劫舍III
- Java复习_3
- 自动驾驶代客泊车AVP路径规划详细设计
- C++ 员工工资管理系统
- Vue知识总结-下
- 一篇文章让你搞懂性能测试6大类型及其关系!
- 后台管理系统 -- 点击导航栏菜单对应的面包屑和标签(Tag)的动态编辑功能
- 安全、高效的MySQL DDL解决方案
- 设计模式-桥接模式