加特兰Demo点迹数据读取和显示
发布时间:2023年12月18日
? ? ? ? 加特兰当前主推的芯片,拿到了样件做了几个基本Demo测试,录取的点迹数据为txt文档,数据格式如下:
FT = 0.10 CMN1 = 263 CMN2 = 150 BNK 0
--- F 0 O 140/2/140!0/0/0/0/0/0.00! ---
BK
00: P 25.67, R 4.11, V 0.00, A -39.04, E -7.04, RCS 25.67, RI 011, VI 000, F 3, C 1.00
01: P 37.64, R 5.27, V 0.00, A -32.14, E -7.08, RCS 37.64, RI 013, VI 000, F 3, C 1.00
02: P 46.10, R 6.13, V -10.33, A 50.44, E 2.99, RCS 46.10, RI 015, VI 438, F 1, C 1.00
03: P 27.36, R 6.51, V -6.05, A 45.52, E -4.39, RCS 27.36, RI 016, VI 469, F 1, C 0.92
04: P 43.76, R 6.43, V -9.98, A 51.48, E 2.89, RCS 43.76, RI 016, VI 440, F 1, C 1.00
05: P 39.81, R 6.46, V -9.67, A 52.81, E 2.54, RCS 39.81, RI 016, VI 443, F 1, C 0.99? ? ? ? 这些数据可以通过python或c++读取解析。
1 数据读取和解析
? ? ? ? python可以通过基本的open函数、read函数读取txt文件,设置好文本路径,通过下面函数即可读取所有点迹行的数据和帧数。
# 读取所有点迹数据
def DetectInputData(filename):
data = []
frame_count = 0
file = open(filename,'r') # 打开文件
file_data = file.readlines() # 读取所有行
for row in file_data:
if len(row) > 90:
data.append(row)
if row == 'BK\n':
frame_count += 1
return data, frame_count????????c++可以通过文件输入流进行读取,主要通过getline()函数,依次读取txt文档的每一行数据,同样可以根据标识信息获取帧数。
// read detect files
void ReadTxtFile(std::ifstream& file_name, std::vector<std::vector<std::string>>& file_array, uint32_t& detect_frame_num)
{
std::string file_str;
uint64_t file_row = 0;
while(getline(file_name, file_str)) { // get information
std::string tmp_str;
std::stringstream file_data(file_str); // all of the data read into file_data
std::vector<std::string> file_line;
if (file_str.size() > 90) {
while(getline(file_data, tmp_str, ':')) {
file_line.push_back(tmp_str);
}
file_array.push_back(file_line); // use "," to separate id and detect information
uint32_t test = 0;
}
if (file_str == "BK"){
detect_frame_num++;
}
// std::cout << file_str << " size:" << file_str.size() << std::endl; // get header
file_row++;
}
}????????再对读取后的数据提取信息,可以根据关键字和","分割符提取。文本中功率为P,距离为R,径向速度为V,方位角度为A,俯仰角度为E,雷达散射截面积为RCS(这里不准确),距离单元索引为RI,速度单元索引为VI,模糊系数为F,点迹概率为C。
00: P 25.67, R 4.11, V 0.00, A -39.04, E -7.04, RCS 25.67, RI 011, VI 000, F 3, C 1.00? ? ? ? 这里主要提取前面几个点迹信息,如距离、速度等,由于雷达固定不动,可以通过径向速度门限区分运动点迹和静止点迹,python和c++版本分别如下,两个函数名一样,代表用途一致。
# 提取点迹信息
def GetDetectInfo(data, detects, speed_thres):
for detect_info in data:
power = 0
distance = 0
vr = 0
azi = 0
ele = 0
for i in range(0, len(detect_info)-1):
if detect_info[i] == 'P':
power = GetValueResult(detect_info, i+1)
if detect_info[i] == 'R' and detect_info[i+1] == ' ':
distance = GetValueResult(detect_info, i+1)
if detect_info[i] == 'V' and detect_info[i+1] == ' ':
vr = GetValueResult(detect_info, i+1)
if detect_info[i] == 'A':
azi = GetValueResult(detect_info, i+1)*DEG2RAD
if detect_info[i] == 'E':
ele = GetValueResult(detect_info, i+1)*DEG2RAD
rcs = 10.0
snr = power - 10.0
x = distance*np.cos(ele)*np.cos(azi)
y = distance*np.cos(ele)*np.sin(azi)
detects.x.append(x)
detects.y.append(y)
detects.speed.append(vr)
detects.snr.append(snr)
detects.rcs.append(rcs)
detects.power.append(power)
# 用径向速度筛选动静点迹
if abs(vr) > speed_thres:
detects.move_x.append(x)
detects.move_y.append(y)
else:
detects.static_x.append(x)
detects.static_y.append(y)????????c++版本由于接入目标跟踪框架,无需做动静分离处理。
// get detect info
void GetDetectInfo(std::vector<std::string>& detect_line , RadarTarget& radar_target)
{
radar_target.timestamp = 0.0f;
radar_target.amb_speed = 100.0f;
RadarPoint tmp_radar = { 0 };
tmp_radar.id = std::atoi(detect_line[0].c_str());
std::string detect_info = detect_line[1];
for (int i = 0; i < detect_info.size() - 1; i++) {
if (detect_info[i] == 'P') {
tmp_radar.power = GetValueResult(detect_info, i+1);
}
if (detect_info[i] == 'R' && detect_info[i+1] == ' ') {
tmp_radar.distance = GetValueResult(detect_info, i+1);
}
if (detect_info[i] == 'V' && detect_info[i+1] == ' ') {
tmp_radar.vr = GetValueResult(detect_info, i+1);
}
if (detect_info[i] == 'A') {
tmp_radar.azimuth = GetValueResult(detect_info, i+1)*DEG2RAD;
}
if (detect_info[i] == 'E') {
tmp_radar.elevation = GetValueResult(detect_info, i+1)*DEG2RAD;
}
}
tmp_radar.rcs = 10.0f;
tmp_radar.snr = tmp_radar.power - 10.0f;
tmp_radar.x = tmp_radar.distance * cosf(tmp_radar.elevation) * cosf(tmp_radar.azimuth);
tmp_radar.y = tmp_radar.distance * cosf(tmp_radar.elevation) * sinf(tmp_radar.azimuth);
tmp_radar.z = tmp_radar.distance * sinf(tmp_radar.elevation) + OFFSET_Z;
radar_target.points.push_back(tmp_radar);
}? ? ? ? 这里都用到了GetValueResult()函数,用来从txt文本中提取数值,两个版本基本一样。
# 获取txt中的数值
def GetValueResult(detect_info, start_pos):
value = ''
for i in range(start_pos, start_pos+10):
if (detect_info[i] == ','):
break
if (detect_info[i] != ' '):
value += detect_info[i]
result = float(value)
return result// 获取txt中的数值
float GetValueResult(std::string& detect_info, int start_pos)
{
std::string value;
float result = 0.0f;
for (int i = start_pos; i < start_pos + 10; i++){
if (detect_info[i] == ',')
{
break;
}
if (detect_info[i] != ' ') {
value += detect_info[i];
}
}
result = (float)std::atof(value.c_str());
return result;
}2 数据显示
? ? ? ? 数据读取后,即可调用画图显示,这里仅使用python。可以看到,用蓝色和红色区分运动和静止点迹,运动目标点迹整体波动不大,精度较高,更精细的评估需要真值设备,这里不再讨论。
# 显示点迹
plt.figure()
plt.scatter(detects.move_y,detects.move_x,s=10,color="b",label="move detect")
plt.scatter(detects.static_y,detects.static_x,s=10,color="r",label="static detect")
plt.legend()
plt.grid(True)
plt.title("Calterah Detect Test")
plt.show()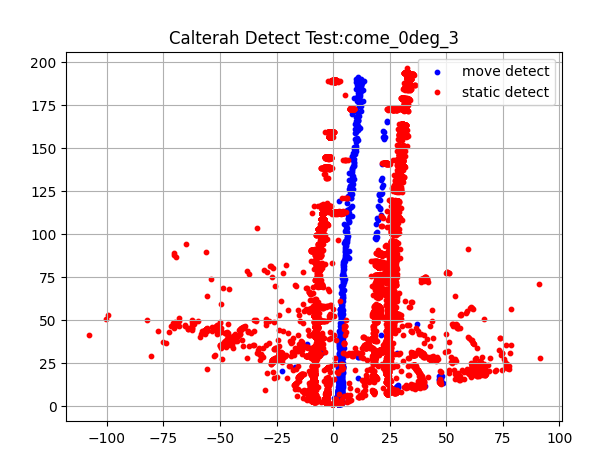
文章来源:https://blog.csdn.net/weixin_41691854/article/details/135061173
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- React入门 - 10(说一说关于 React 的一些理论 )
- learn shell
- figma 基础使用——准备阶段
- 用弹性盒子实现垂直居中及用css实现图片垂直居中
- HashMap和Hashtable的区别(绝对经典)
- QT上位机开发(权限管理)
- Zblog主题模板:森木博客响应式博客主题模板
- C语言中实现顺序表的插入、删除和更新操作(附带源码)
- BGP Local-preferenct 、AS-Path、 Origin 综合选路实验
- 第二百七十回