opencv#33 边缘检测
边缘检测原理
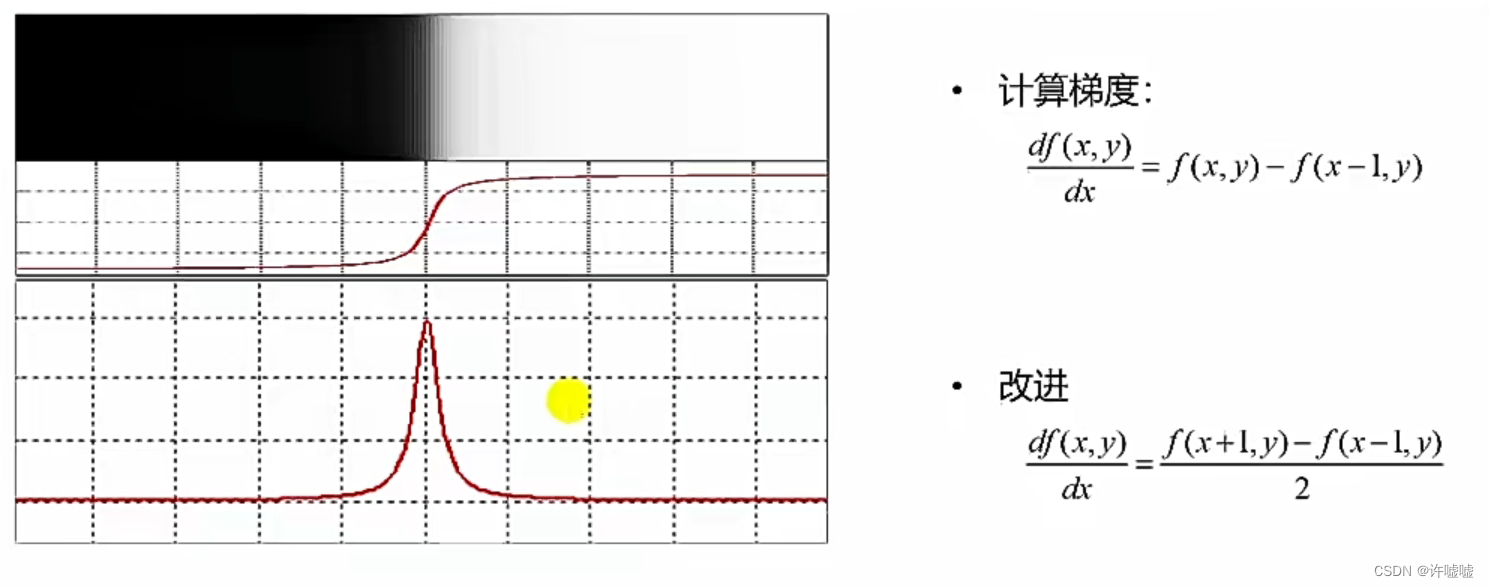
? ? ?图像的每一行每一列都可以看成是一个连续的信号经过离散后得到的数值,例如上图左侧给出的图像由黑色到白色的一个信号,也就是图像中某一行像素变化是由黑色逐渐到白色,我们将其对应在一个坐标轴中,将像素值的大小对应与我们y轴,我们可以得到中间图片的曲线,曲线就表示这图像某一行像素灰度值的变化关系,当我们对此曲线求导,就可以得到最下面图片的曲线,图像的边缘就是图像中像素灰度值发生变化的像素点的集合,通过计算函数导数的方式可以找到灰度值变化的点,导数值大说明灰度值变化大,导数值为0,说明灰度值没有变化。图像边缘就是对于灰度函数图像中函数值发生突然改变的区域(点的集合)。
? ? ? 导数(梯度)是微分中的概念,而微分针对的是连续可导的函数,但我们图像是离散的函数,因此对应着差分。微分差分核心思想一致,我们在边缘检测的过程中运用微分的思想来指导,但在实际操作中,我们用差分的形式来实现边缘检测。
? ? ? 我们计算梯度(导数)时,通常采用差分值来表示导数,差分值就是两个像素的差值,由于梯度对于图像信号来说是一个相对的概念,也就是如果每一个梯度都乘或除以2是没有任何区别的,因此这里我们直接相减就可以。两个像素间的梯度对应在图像中没有意义,因此我们改进的想法是,若有三个像素,第三个像素减去第一个像素除以两者之间的距离,得到的就是第二个像素的梯度,通过这样的方式实现了梯度与像素相对应的方式。
Sobel算子边缘检测
Sobel()
void cv::Sobel(InputArray src,
OutputArray dst,
int ddepth,
int dx,
int dy,
int ksize = 3,
double scale = 1,
double delta = 0,
int borderType = BORDER_DEFAULT
)
·src:待边缘检测图像。
·dst:边缘检测后图像,与输入图像具有相同的尺寸和通道数。
·ddepth:边缘检测后,输出图像的数据类型,由于像素的变化不规律,因此我们用后一时刻的像素减去前一时刻的像素,两个像素的大小未知,可能会出现负值,所以不推荐使用八位无符号整数8U,我们可以使用16S。
·dx,dy:进行索贝尔算子时对于边缘检测的梯度的阶次。
·ksize:使用边缘检测时算子的尺寸大小,默认值为3.
·scale,delta:卷积过程中,对结果进行缩放的系数以及偏移量。例如图像变化平缓,那么得到的系数可能就比较小,直接乘这个系数就可以将梯度扩大,scale默认值为1,也就是不对结果进行缩放,delta默认值为0,也就是不对结果进行偏移。
·borderType:图像外扩标志。
? ? ?进行索贝尔边缘检测时,常见的方法是先进行行检测,再进行列检测,也就是对x和y方向分别求导。而在图像的每一点,结合上面求出的导数值,利用勾股定理求出近似梯度,或者是为了提高效率,使用不开平方的近似:利用x和y方向的导数的绝对值之和求出图像每一点的近似值的绝对值。这样可以实现对于图像整体的边缘检测。
? ? ?索贝尔算子为了增加梯度的大小,允许计算时三行同时进行计算,例如上图x方向的计算,是有一个主要的计算行(比如中间行),上下两行作为辅助计算,主要行所占权重较大,辅助行所占权重较小,y方向计算也是一样的,对y行进行转置,就可以得到y方向上边缘检测的边缘检测算子。
Scharr算子边缘检测
Scharr()
void cv::Scharr(InputArray src,
OutputArray dst,
int ddepth,
int dx,
int dy,
double scale = 1,
double delta = 0,
int borderType = BORDER_DEFAULT
)
Scharr算子就是在原先索贝尔算子的基础上对边缘检测的结果进一步加强。也就是得到的边缘响应更强了。
x方向的算子其实就是在索贝尔算子的基础上调整了每一个位置的系数,将主要行设置成10,将辅助行设置成3,这样可以得到一个较大的响应,但坏处是比较微弱的边缘通过此算子计算也会得到较强的响应。对于x方向算子进行转置,我们也可以得到y方向的算子。
两种算子的生成
getDerivKernels()
上面两种算子的函数内部也是调用了此函数。
void cv::getDerivKernels(OutputArray kx,
OutputArray ky,
int dx,
int dy,
int ksize,
normalize =
bool false,
int ktype = cv_32F
)·kx:行滤波器系数的输出矩阵,尺寸为ksize*1。
·ky:列滤波器系数的输出矩阵,尺寸为ksize*1。
·dx:X方向导数的阶次。
·dy:y方向导数的阶次。
·ksize:滤波器的大小,可以选择的参数为FILTER_SCHARR(得到的就是Scharr算子),1,3,5,或7(可设定为索贝尔算子)。
·normalize:是否对滤波器系数进行归一化的标志,默认值为false,表示不进行归一化。上面的Sobel算子和Scharr算子都没有进行归一化,可能会使得边缘梯度响应特别大。
·ktype:滤波器系数类型,可以选择CV_32F或CV_64F,默认参数是CV_32F。
这里需要说明一点:当我们选择Sobel算子时,梯度阶数dx,dy <= 尺寸;Scharr算子的dx+dy <= 1。
通过这样的形式规定了结束与算子种类以及尺寸的关系,当我们求取过高的阶数,而采用较小的尺寸,这样是没办法实现过高阶数的求取的。
示例
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv; //opencv的命名空间
using namespace std;
//主函数
int main()
{
//读取图像,黑白图像边缘检测结果较为明显
Mat img = imread("E:/opencv/opencv-4.6.0-vc14_vc15/opencv/lenaGray.png");
if (img.empty())
{
cout << "请确认图像文件名称是否正确" << endl;
return -1;
}
Mat resultX, resultY, resultXY;
//X方向一阶边缘
Sobel(img, resultX, CV_16S, 1, 0, 1); //尺寸参数设置为1其实是3
convertScaleAbs(resultX, resultX); //求绝对值函数
//Y方向一阶边缘
Sobel(img, resultY, CV_16S, 0, 1, 3); //只不过将上面的dx,dy交换了,尺寸参数设置为1还是3是一致的
convertScaleAbs(resultY, resultY);
//整体图像的一阶边缘
resultXY = resultX + resultY;
//显示图像
imshow("resultX", resultX);
imshow("resultY", resultY);
imshow("resultXY", resultXY);
cout << "下面是进行Scharr边缘检测" << endl;
waitKey(0);//等待函数用于显示图像,按下键盘任意键后退出
//X方向一阶边缘
Scharr(img, resultX, CV_16S, 1, 0);
convertScaleAbs(resultX, resultX); //求绝对值函数
//Y方向一阶边缘
Scharr(img, resultY, CV_16S,0,1);
convertScaleAbs(resultY, resultY);
//整体图像的一阶边缘
resultXY = resultX + resultY;
//显示图像
imshow("resultX", resultX);
imshow("resultY", resultY);
imshow("resultXY", resultXY);
cout << "接下来生成边缘检测器" << endl;
waitKey(0);//等待函数用于显示图像,按下键盘任意键后退出
Mat sobel_x1, sobel_y1;//存放分离的Sobel算子
Mat scharr_x, scharr_y;//存放分离的Scharr算子
Mat sobelX1, scharrX;//存放最终算子
//一阶X方向Sobel算子
getDerivKernels(sobel_x1, sobel_y1, 1, 0, 3);//一阶尺寸为3
sobel_x1 = sobel_x1.reshape(CV_8U, 1);
sobelX1 = sobel_y1 * sobel_x1; //计算滤波器
//X方向Scharr算子
getDerivKernels(scharr_x, scharr_y, 1, 0, FILTER_SCHARR);
scharr_x = scharr_x.reshape(CV_8U, 1);
scharrX = scharr_y * scharr_x; //计算整体x方向滤波器
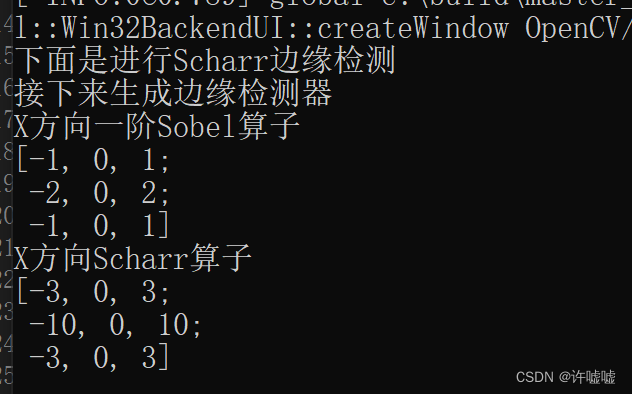
cout << "X方向一阶Sobel算子" << endl << sobelX1 << endl;
cout << "X方向Scharr算子" << endl << scharrX << endl;
waitKey(0);//等待函数用于显示图像,按下键盘任意键后退出
return 0;
}结果
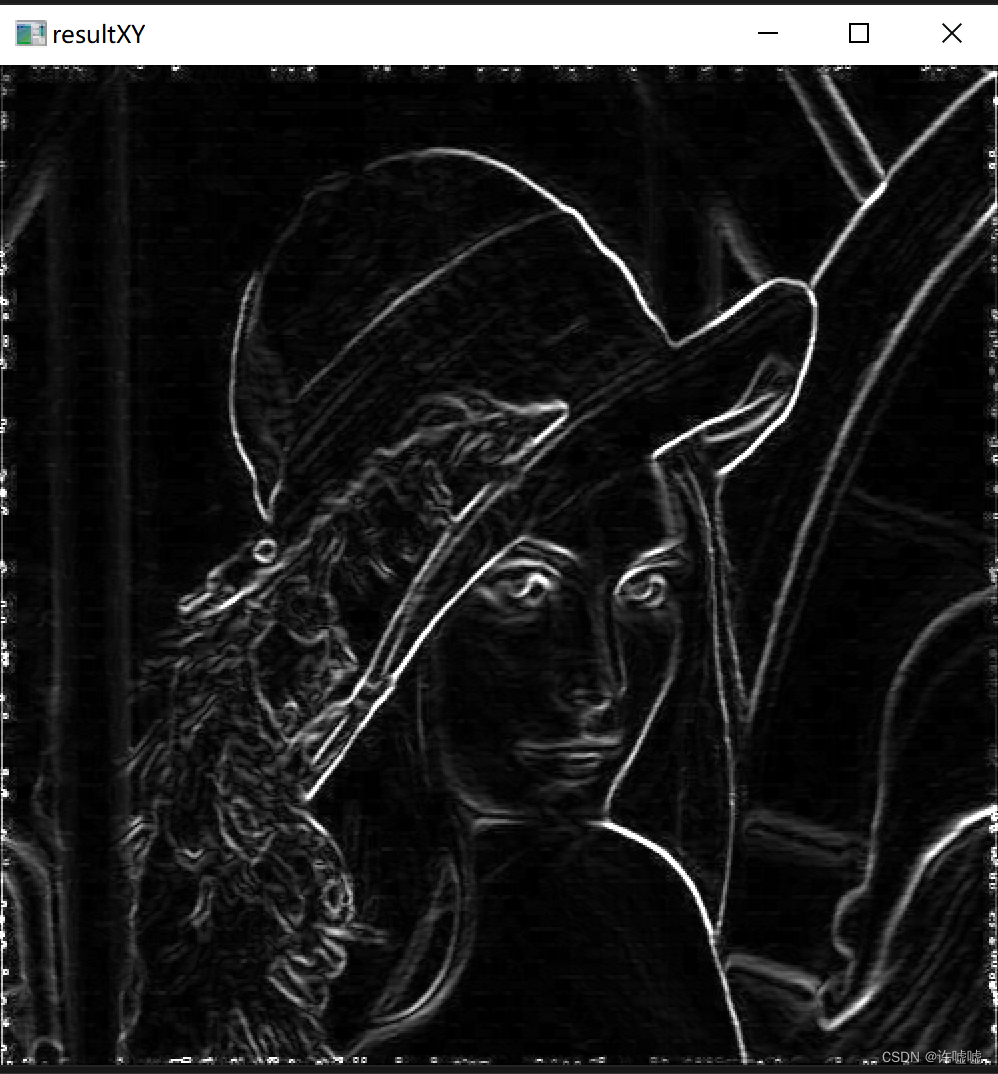
Sobel边缘检测:

 ?
?
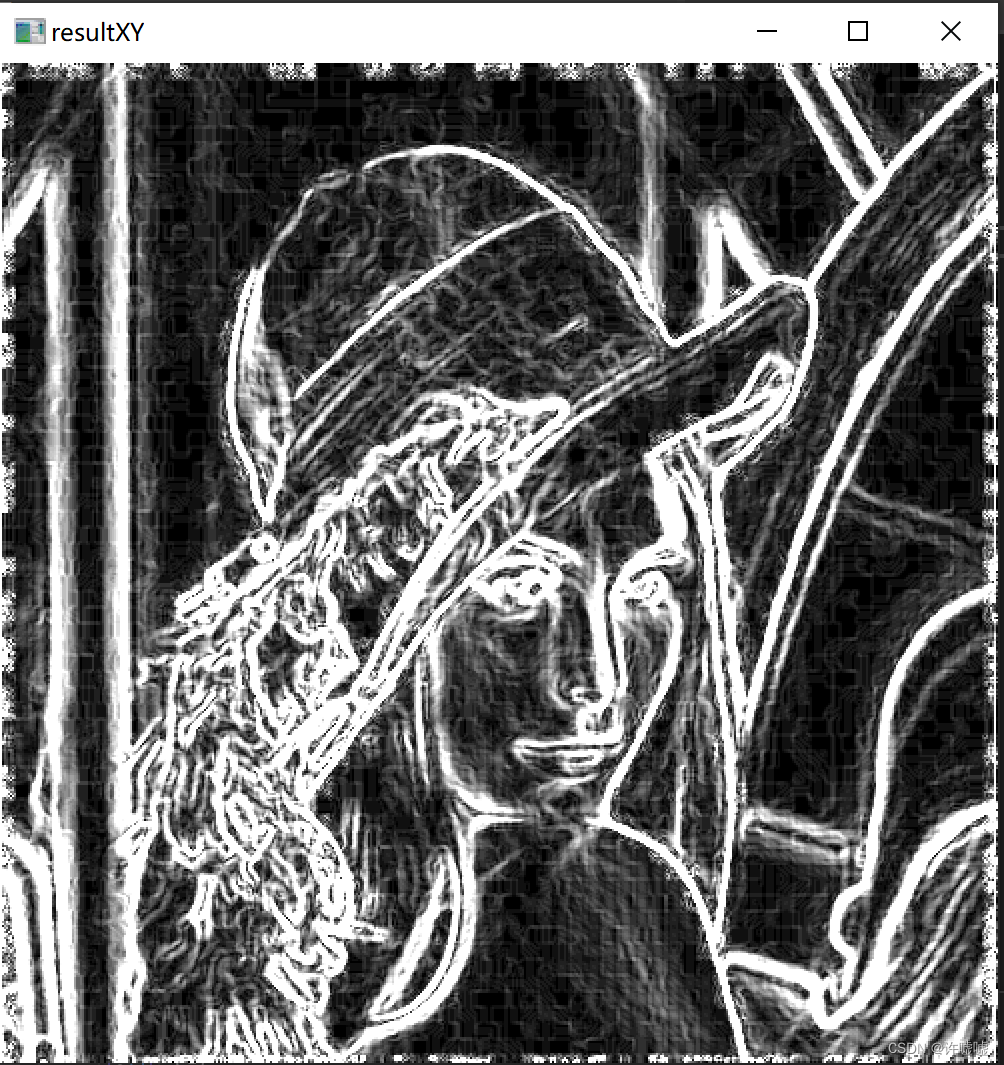
Scharr边缘检测:
 ?
?
 ?
?
生成的边缘检测器:
 ?
?
对于Sobel算子边缘检测的X方向,得到的边缘更多的是垂直的边缘,而Y方向,得到的边缘更多的是行方向的边缘,说明X方向和Y方向在进行检测时是各有侧重点的。将两者叠加就可以得到整幅图像的边缘。
对于Scharr算子边缘检测与Sobel是类似的,由于Scharr类型将得到的边缘梯度进行了很大的扩展,因此较小的边缘区域也被显示出来,所以得到的结果中感觉出有很多边缘,实际上它对微弱的边缘进行了扩充,可能两个像素只相差1,但是对结果扩大了很多倍,显示的就较亮,得到整体也是一个更加亮的图像。
生成的两种算子的类型,得到的结果是与上面一致。
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 软考哪个证书最有用?备考建议!
- Java刷题错题笔记-day07-IO
- 【Leetcode】 447. 回旋镖的数量
- 强化学习应用(八):基于Q-learning的无人机物流路径规划研究(提供Python代码)
- 网络端(包括TCP端口和UDP端口)的作用、定义、分类,以及在视频监控和流媒体通信中的定义
- 简单高效LaTeX 006 - LaTex Punctuation and Emphasize 标点与强调
- CSS两种盒模型以及区别、CSS合并方法、CSS文件合并方法、label的作用是什么?如何美化CheckBox?
- 游戏、设计选什么内存条?光威龙武系列DDR5量大管饱
- ElasticSearch面试题
- 【系统DFX】如何诊断占用过多 CPU、内存、IO 等的神秘进程?