ArduPilot之开源代码电压/电流校准
发布时间:2024年01月16日
ArduPilot之开源代码电压/电流校准
1. 源由
关于inav/betaflight做了电压、电流的校准后,再来看Ardupilot的电流电压校准就比较容易,因为校准的原理都是类似的。
【1】BetaFlight开源代码之电压校准
【2】BetaFlight开源代码之电流校准
校准采用的方法都是一次线性拟合校准。
2. 校准公式
注:当BATT_MONITOR = 4的时候,系统采用ADC采样。其他数字模式(ESC、INA239_SPI等)采样就无需校准了。
2.1 电压校准
_state.voltage = (_volt_pin_analog_source->voltage_average() - _volt_offset) * _volt_multiplier
2.2 电流校准
_state.current_amps = (_curr_pin_analog_source->voltage_average() - _curr_amp_offset) * _curr_amp_per_volt
3. 校准参数
3.1 电压参数
- BATT_VOLT_PIN: Battery Voltage sensing pin
- BATT_VOLT_MULT: Voltage Multiplier
- BATT_VLT_OFFSET: Voltage offset
3.2 电流参数
- BATT_CURR_PIN: Battery Current sensing pin
- BATT_AMP_PERVLT: Amps per volt
- BATT_AMP_OFFSET: AMP offset
4. 实例校准
注:拟合工具,详见Linear regression calculator。
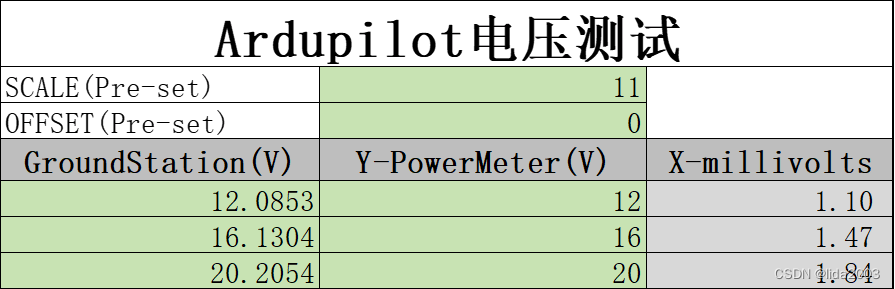
4.1 电压校准
默认配置通常:BATT_VLT_OFFSET = 0
 从拟合曲线结果看,其实默认值非常准确。
从拟合曲线结果看,其实默认值非常准确。
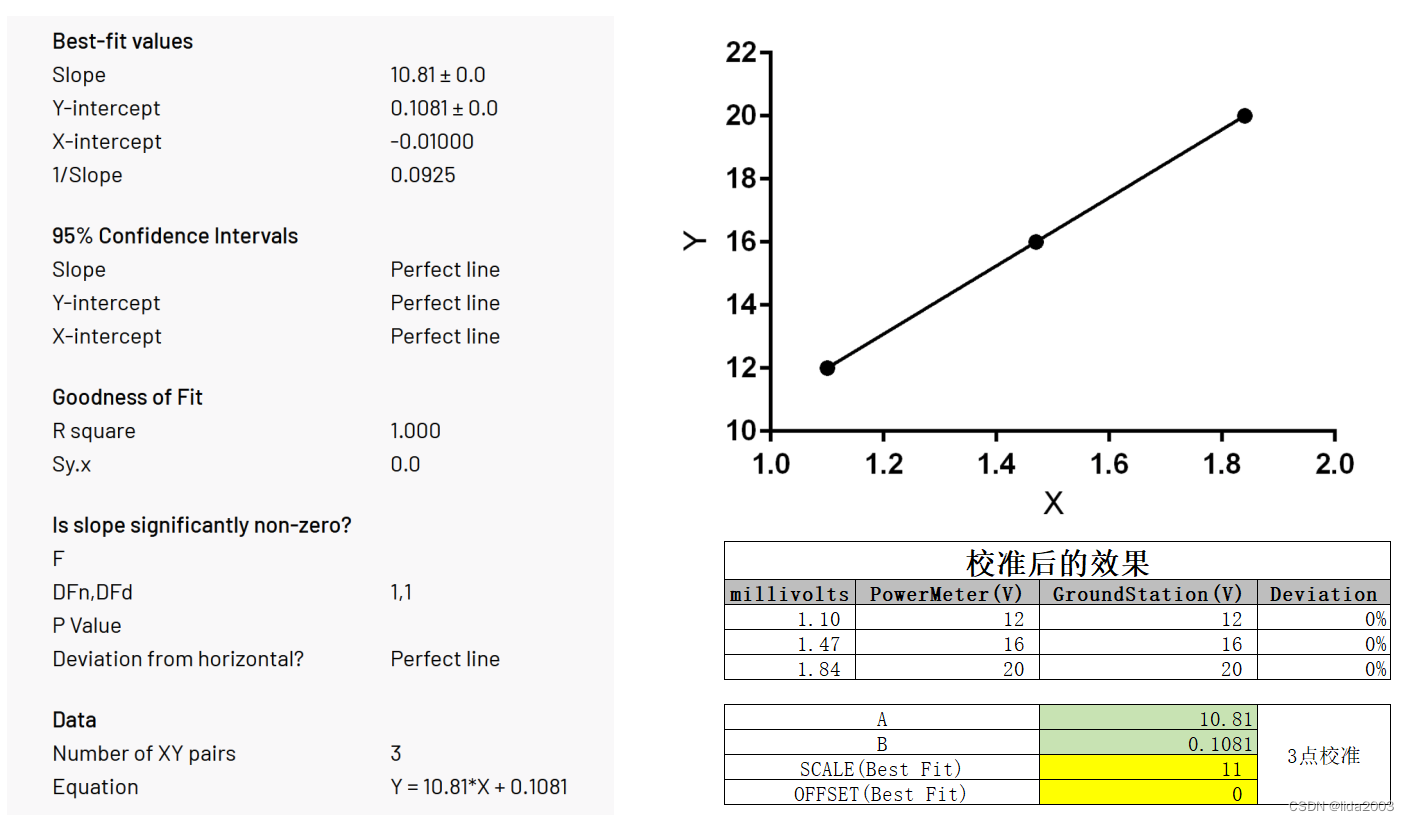
因此,该目标板配置电压参数如下:
BATT_VOLT_MULT = 11
BATT_VLT_OFFSET = 0
4.2 电流校准
默认配置通常:BATT_AMP_OFFSET = 0
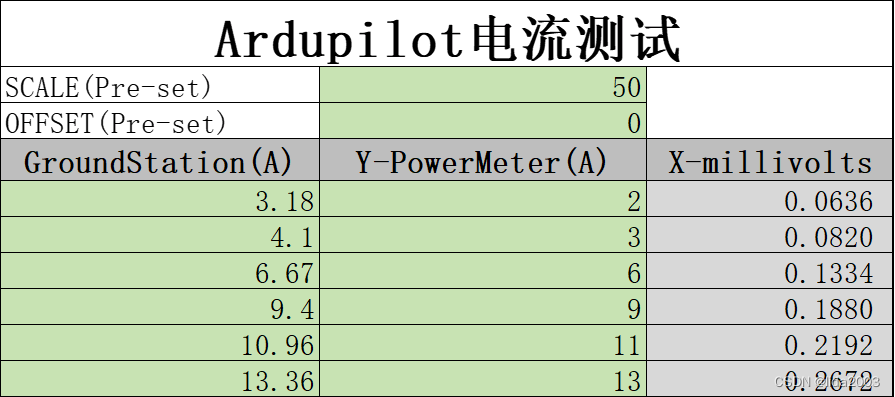
实测值还是有较大偏差的,拟合后会相对偏差小很多。
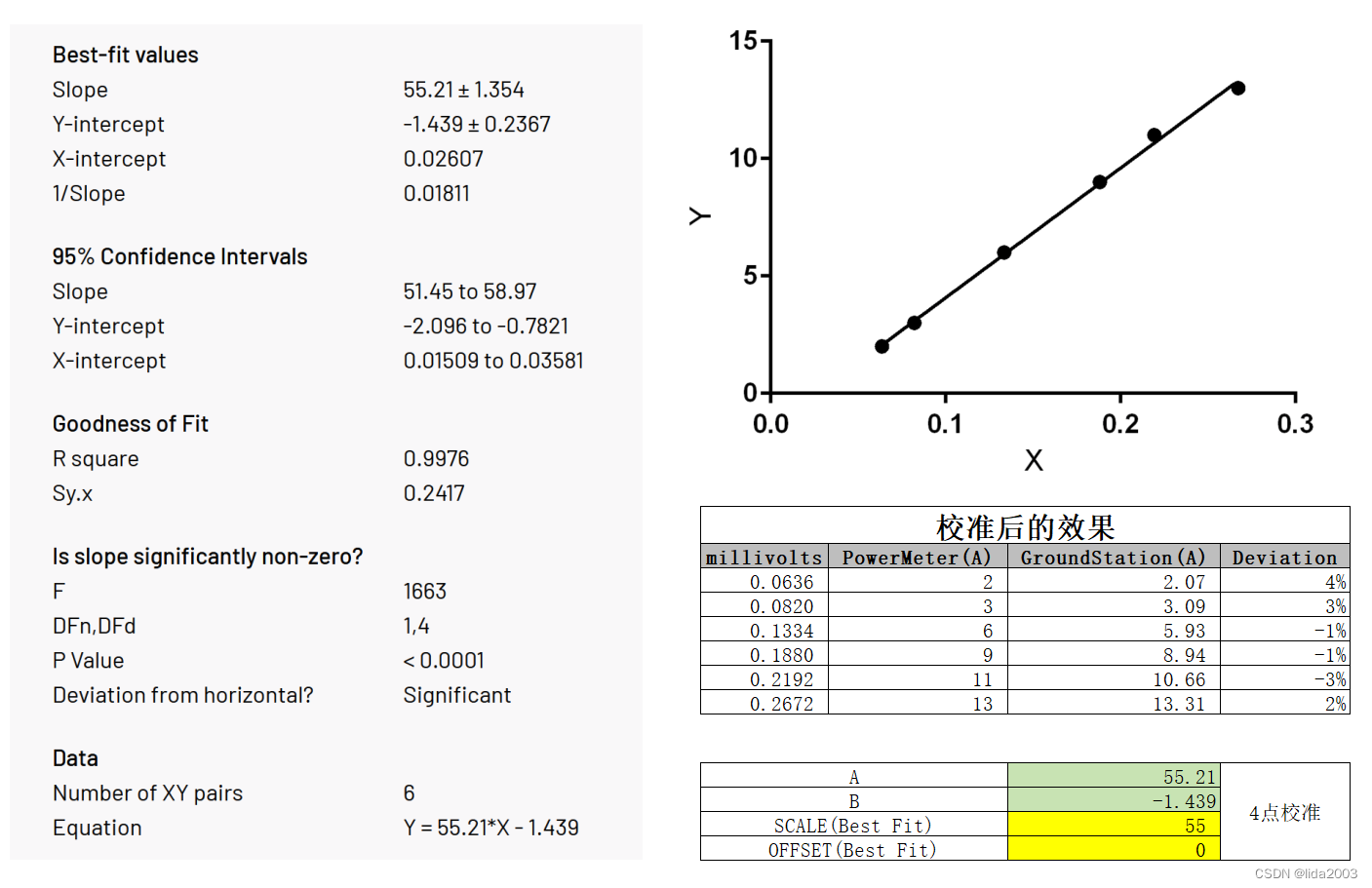
因此,该目标板和电调板,配置电流参数如下:
BATT_AMP_PERVLT = 55
BATT_AMP_OFFSET = 0
5. 参考资料
【1】BetaFlight开源代码之电压校准
【2】BetaFlight开源代码之电流校准
【3】ArduPilot开源飞控系统之简单介绍
【4】ArduPilot - Aocoda-RC H743Dual
文章来源:https://blog.csdn.net/lida2003/article/details/135626570
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 找不到mfc140.dll无法继续执行怎么办?总结5个修复方法
- 【Linux--管道】
- C++11【右值引用,移动语义,完美转发】
- Rancher2部署MySQL无法挂载Longhorn创建的pvc,怎么办?
- 11-Kafka
- FDG6306P MOSFET结构及其工作原理详解
- TLC549(8位A/D转换器)实现将输入的模拟电压显示到数码管上
- linux驱动(一):led
- shell 如何调用多个脚本
- 如何用ChatGPT写教案设计?以“沁园春雪”为例