利用STM32CubeMX和keil模拟器,3天入门FreeRTOS(2.1) —— 任务挂起和恢复
前言
(1)FreeRTOS是我一天过完的,由此回忆并且记录一下。个人认为,如果只是入门,利用STM32CubeMX是一个非常好的选择。学习完本系列课程之后,再去学习网上的一些其他课程也许会简单很多。
(2)本系列课程是使用的keil软件仿真平台,所以对于没有开发板的同学也可也进行学习。
(3)叠甲,再次强调,本系列课程仅仅用于入门。学习完之后建议还要再去寻找其他课程加深理解。
(4)本系列博客对应代码仓库:
实操
(1)依旧是将上一篇博客的工程复制一份下来
任务挂起和恢复的宏
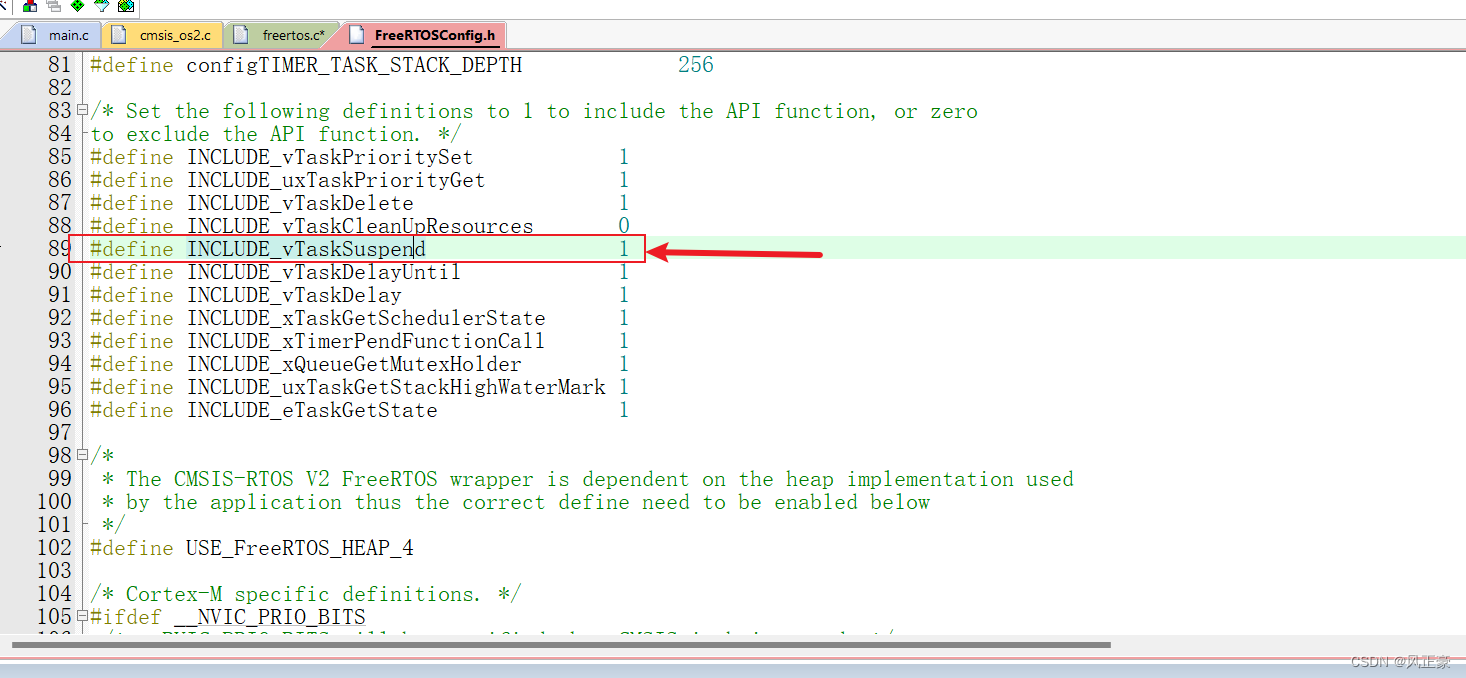
(1)如果需要调用任务挂起和恢复的函数,需要在
FreeRTOSConfig.h文件中确认INCLUDE_vTaskSuspend这个宏被置1了。
任务挂起和恢复代码实现
(1)在
StartCubemxTask函数中进行如下补充即可。(按Ctrl+F搜索StartCubemxTask即可找到任务函数)
/* USER CODE END Header_StartCubemxTask */
void StartCubemxTask(void *argument)
{
/* USER CODE BEGIN StartCubemxTask */
char *CubemxTaskPrintf = (char *)argument;
uint8_t Task_Status = 0;
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_14) == GPIO_PIN_SET)
{
printf(CubemxTaskPrintf);
Task_Status++;
while(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_14) == GPIO_PIN_SET);
}
switch(Task_Status)
{
case 1:
// 挂起 keilTask 任务
vTaskSuspend(keilTaskHandle);
break;
case 2:
// 恢复 keilTask 任务
vTaskResume(keilTaskHandle);
break;
default:
Task_Status = 0;
break;
}
}
/* USER CODE END StartCubemxTask */
}
测试结果
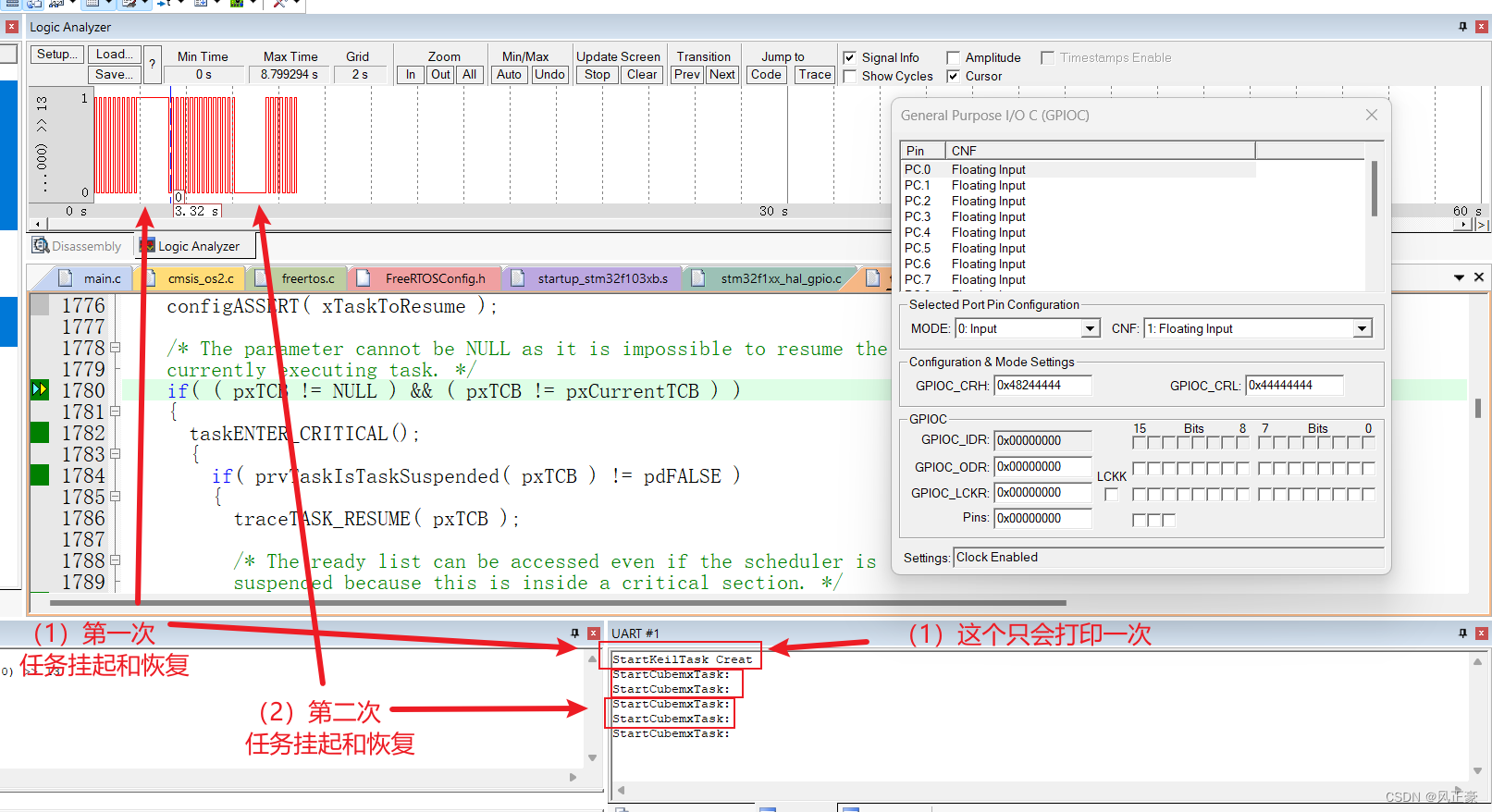
(1)因为这里不会修改
STM32CubeMX,所以keil的模拟器配置都还在,因此可以直接开始测试。
(2)测试结果发现,StartKeilTask Creat的字符串只会打印一次。而不是像任务删除和创建那样,每进行一次删除和创建都会打印一次StartKeilTask Creat。
理论
FreeRTOS的4种任务状态
(1)首先我先介绍一下
FreeRTOS的4种任务状态都是什么意思:
<1>Running 运行态: 当任务处于实际运行状态称之为运行态,即CPU的使用权被这个任务占用(对于单核处理器,同一时间仅一个任务处于运行态。后续会讲解RTOS的多任务执行原理)。
<2>Ready 就绪态: 处于就绪态的任务是指那些能够运行(没有被阻塞和挂起),但是当前没有运行的任务,因为同优先级或更高优先级的任务正在运行。
<3>Blocked 阻塞态: 如果一个任务因延时,或等待信号量、消息队列、事件标志组等而处于的状态被称之为阻塞态。当出现特定的事件发生,会自动进入就绪态。
<4>Suspended 挂起态: 任务暂停,必须手动调用xTaskResume()函数才可以进入就绪态。
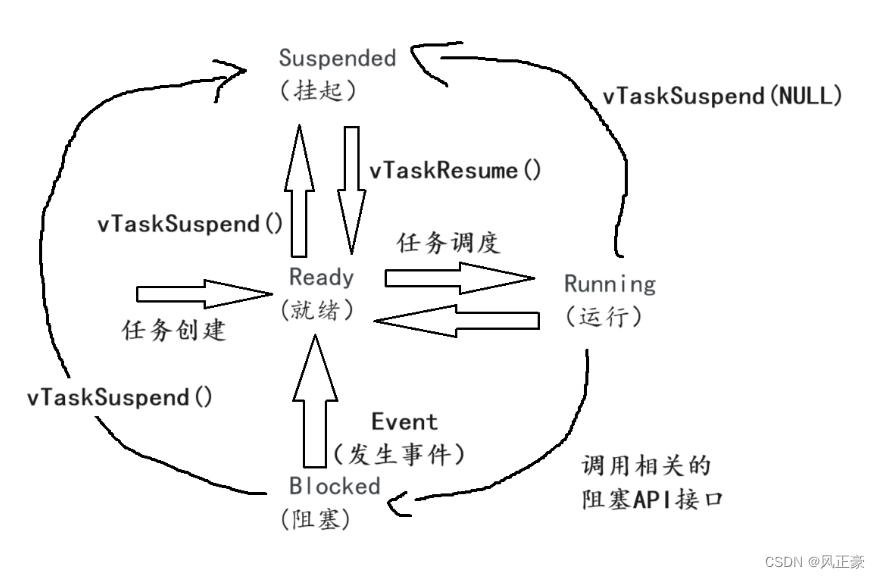
(2)因为网上的FreeRTOS的4种任务切换图都是纯英文的,我于是就自己画了一个。这里简单介绍一下:
<1>进入就绪态: 当我们创建了一个任务之后,他就会进入就绪态,等待任务调度。
<2>就绪态和运行态切换: 就绪态和运行态的切换是由FreeRTOS的任务调度器进行切换的,我们人为无法改变。
<3>就绪态和阻塞态切换: 当发生特定的任务时候,任务会自动从阻塞态进入就绪态。例如任务延时结束,成功获取到了信号量、消息队列、事件标志组等信息。(听不懂别慌,后面讲同步互斥与通信的时候会详细讲解)
<4>就绪态和挂起态切换:
- 当运行中的任务调用
vTaskSuspend()函数,并在这个函数中传入需要挂起的任务句柄,那么这个处于就绪态的任务将会变为挂起态。- 当运行中的任务调用
vTaskResume()函数,并在这个函数中传入需要从挂起态进入就绪态的任务句柄,那么这个处于挂起态的任务将会变为就绪态。<5>运行态和挂起态切换: 当运行中的任务调用
vTaskSuspend(NULL)的时候,就能够从运行态进入挂起态。
<6>运行态和阻塞态切换: 调用相关的阻塞API接口,例如vTaskDelay()、vTaskDelayUntil()这种延时函数,或者是信号量、消息队列或事件组等机制的一些函数。
<7>挂起态和阻塞态切换: 当运行中的任务调用vTaskSuspend()函数,并在这个函数中传入需要挂起的任务句柄,那么这个处于阻塞态的任务将会变为挂起态。
eTaskGetState()函数介绍
(1)获取任务状态
/**
* @brief 获取任务状态
*
* @param 需要获取任务状态的任务句柄
*
* @return eRunning 任务处于Running运行态
* -eReady 任务处于Ready就绪态
* -eBlocked 任务处于Blocked阻塞态
* -eSuspended 任务处于Suspended挂起态
* -eDeleted 任务的结构正在等待清理
*/
eTaskState eTaskGetState( TaskHandle_t xTask );
vTaskSuspend()函数介绍
(1)
vTaskSuspend()用于挂起(暂停)任务,传入对应的任务句柄即可。
(2)如果需要挂起(暂停),那么就传入NULL。
/**
* @brief 挂起(暂停)的任务
*
* @param 要挂起(暂停)任务的任务句柄,如果是挂起(暂停)自己,传入NULL
*
* @return 无
*/
void vTaskSuspend( TaskHandle_t xTaskToSuspend );
vTaskResume()函数介绍
(1)
vTaskResume()用于恢复被挂起(暂停)任务,传入对应的任务句柄即可。
(2)担心有小白问出一些抽象的问题,比如,为什么可以自己挂起自己,而不能自己恢复自己呢?你想想,任务都挂起了,根本就无法执行,你还自己恢复自己,咋想的?
/**
* @brief 恢复的任务
*
* @param 要恢复任务的任务句柄
*
* @return 无
*/
void vTaskResume( TaskHandle_t xTaskToResume );
参考
(1)FreeRTOS官方文档:vTaskSuspend函数介绍
(2)FreeRTOS官方文档:vTaskResume函数介绍
(3)FreeRTOS官方API文档
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 3步建立全新的营销模式
- 检测并批量导出项目文件中所有最近修改文件的实用工具
- com.github.ltsopensource.remoting.exception.RemotingConnectException报错
- 如何将铁威马NAS设置为固定IP?
- NISSHINBO日清纺微低噪声、高耐压、双路高音质音频运算放大器“NL8802”发布上市
- 数据结构与算法笔记
- 从源码到实践:深入了解鸿鹄电子招投标系统与电子招投标
- Python面向对象初级:三大特性(封装、继承与派生、多态与抽象基类)
- vscode颜色主题插件one dark Pro安装
- Linux进程程序替换