华清远见作业第二十七天——网络编程(第二天)
发布时间:2024年01月15日
思维导图:

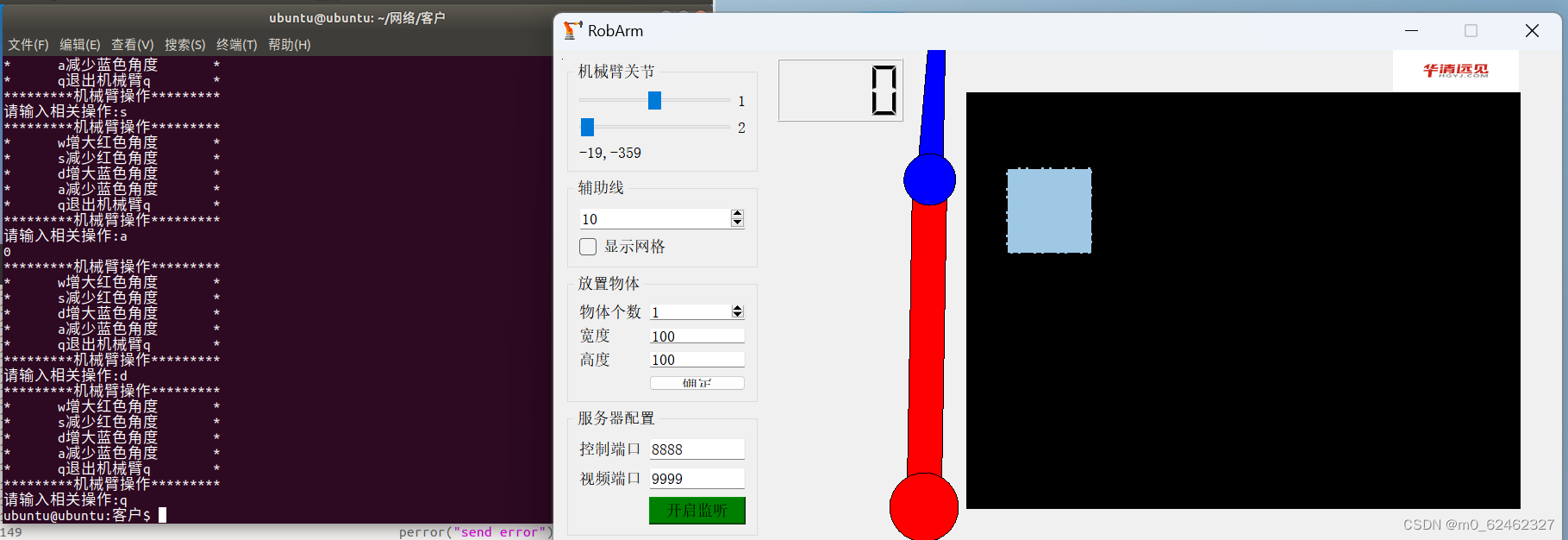
在虚拟机实现客户端控制机械臂
代码:
#include<stdio.h>
#include<string.h>
#include<stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <a.h>
#define SER_PORT 8888 //服务端口
#define SER_IP "192.168.125.4" //服务器ip地址
#define CLI_PORT 6666// 客户端的端口
#define CLI_IP "192.168.125.229" //客户端的ip地址
void menu()
{
printf("*********机械臂操作*********\n");
printf("* w增大红色角度 *\n");
printf("* s减少红色角度 *\n");
printf("* d增大蓝色角度 *\n");
printf("* a减少蓝色角度 *\n");
printf("* q退出机械臂q *\n");
printf("*********机械臂操作*********\n");
}
int main(int argc, const char *argv[])
{
//1创建用于通信的套接字文件描述符
int cfd=-1;
cfd=socket(AF_INET,SOCK_STREAM,0);
if(cfd==-1)
{
perror("socket error");
return -1;
}
printf("cfd=%d\n",cfd);
//将端口号快速重用函数
int reuse=1;
if(setsockopt(cfd,SOL_SOCKET,SO_REUSEADDR,&reuse,sizeof(reuse))==-1)
{
perror("setsockopt error");
return -1;
}
printf("端口号快速重用成功\n");
//2绑定
//2.1填充地址信息结构体
struct sockaddr_in cin;
cin.sin_family=AF_INET;
cin.sin_port=htons(CLI_PORT);
cin.sin_addr.s_addr=inet_addr(CLI_IP);
//2.2
if(bind(cfd,(struct sockaddr*)&cin,sizeof(cin))==-1)
{
perror("bind error");
return -1;
}
printf("bind success\n");
//3连接服务器
//3.1填充服务器地址信息结构体
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(SER_PORT);
sin.sin_addr.s_addr= inet_addr(SER_IP);
//3.2连接
if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))==-1)
{
perror("connect error");
return -1;
}
printf("connect success\n");
//4收发数据
char rbuf[5]={0xff,0x02,0x00,0x01,0xff}; //红色
char bbuf[5]={0xff,0x02,0x01,0x02,0xff}; //蓝色
char key=0;
int s=1; //控制while循环
while(s==1)
{
//从终端获取按键
menu();
printf("请输入相关操作:");
scanf("%c",&key);
getchar();
//从输入的字节符进行分支选择
switch(key)
{
case 'w':
case 'W':
{
rbuf[3]+=2;
if(rbuf[3]>=90)
{
rbuf[3]=90;
}
//发送数据
int c=send(cfd,rbuf,sizeof(rbuf),0);
if(c==-1)
{
perror("send error");
return -1;
}
break;
}
case 's':
case 'S':
{
rbuf[3]-=2;
if(rbuf[3]<=-90)
{
rbuf[3]=-90;
}
//发送数据
int c=send(cfd,rbuf,sizeof(rbuf),0);
if(c==-1)
{
perror("send error");
return -1;
}
break;
}
case 'd':
case 'D':
{
bbuf[3]+=2;
if(bbuf[3]>=180)
{
rbuf[3]=180;
}
//发送数据
int c=send(cfd,bbuf,sizeof(bbuf),0);
if(c==-1)
{
perror("send error");
return -1;
}
break;
}
case 'a':
case 'A':
{
bbuf[3]=bbuf[3]-2;
if(bbuf[3]<=0)
{
bbuf[3]=0;
}
printf("%d\n",bbuf[3]);
//发送数据
int c=send(cfd,bbuf,sizeof(bbuf),0);
if(c==-1)
{
perror("send error");
return -1;
}
break;
}
case 'q':
case 'Q':
{
s=0;
break; //结束循环
}
default:
{
printf("内容输入错误请重新输入\n");
break;
}
}
}
//5关闭套接字
close(cfd);
return 0;
}运行效果:
机械臂资源:
?https://download.csdn.net/download/m0_62462327/88746050?spm=1001.2014.3001.5501
文章来源:https://blog.csdn.net/m0_62462327/article/details/135609746
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- vue3 setup语法糖写法基本教程
- 64.Spring事件监听的核心机制是什么?
- SQL窗口函数大小详解
- Transformer简单理解
- SCI一区级 | Matlab实现GWO-CNN-GRU-selfAttention多变量多步时间序列预测
- Python如何删除文件?
- 【测试运维】性能测试知识笔记第1篇:性能测试分类和参数(已分享,附代码)
- Lamda 使用案例(一)
- 如何在 Python 中将语音转换为文本
- springcloud sleuth分布式请求链路跟踪