ES 原理和使用场景
为什么不能使用数据库做搜索?
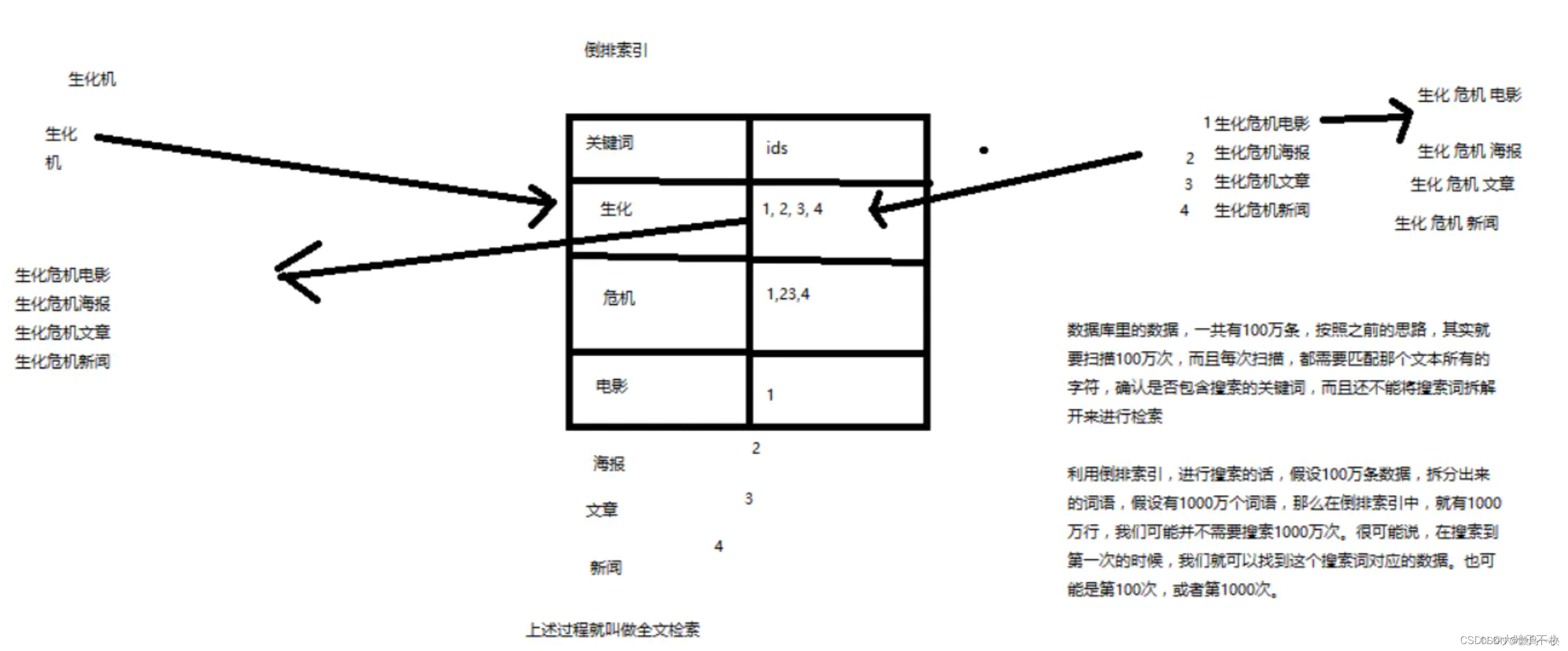
- 1、比方说,每条记录的指定字段的文本,可能会很长,比如说“商品描述”字段的长度,有长达数千个,甚至数万个字符,这个时候,每次都要对每条记录的所有文本进行扫描。
你包不包含我指定的这个关键词(比如说“牙膏”) - 2、还不能将搜索词拆分开来,尽可能去搜索更多的符合你的期望的结果,比如输入“生化机”,就搜索不出来“生化危机”
总的来说就是数据库来实现搜索,是不太靠谱的。通常来说,性能会很差的。
NoSQL 优点:
(1)数据量较大,es的分布式本质,可以帮助你快速进行扩容,承载大量数据
(2)数据结构灵活多变,随时可能会变化,而且数据结构之间的关系,非常复杂,如果我们用传统数据库,那是不是很坑,因为要面临大量的表
(3)对数据的相关操作,较为简单,比如就是一些简单的增删改查,用我们之前讲解的那些document操作就可以搞定
(4)NoSQL数据库,适用的也是类似于上面的这种场景
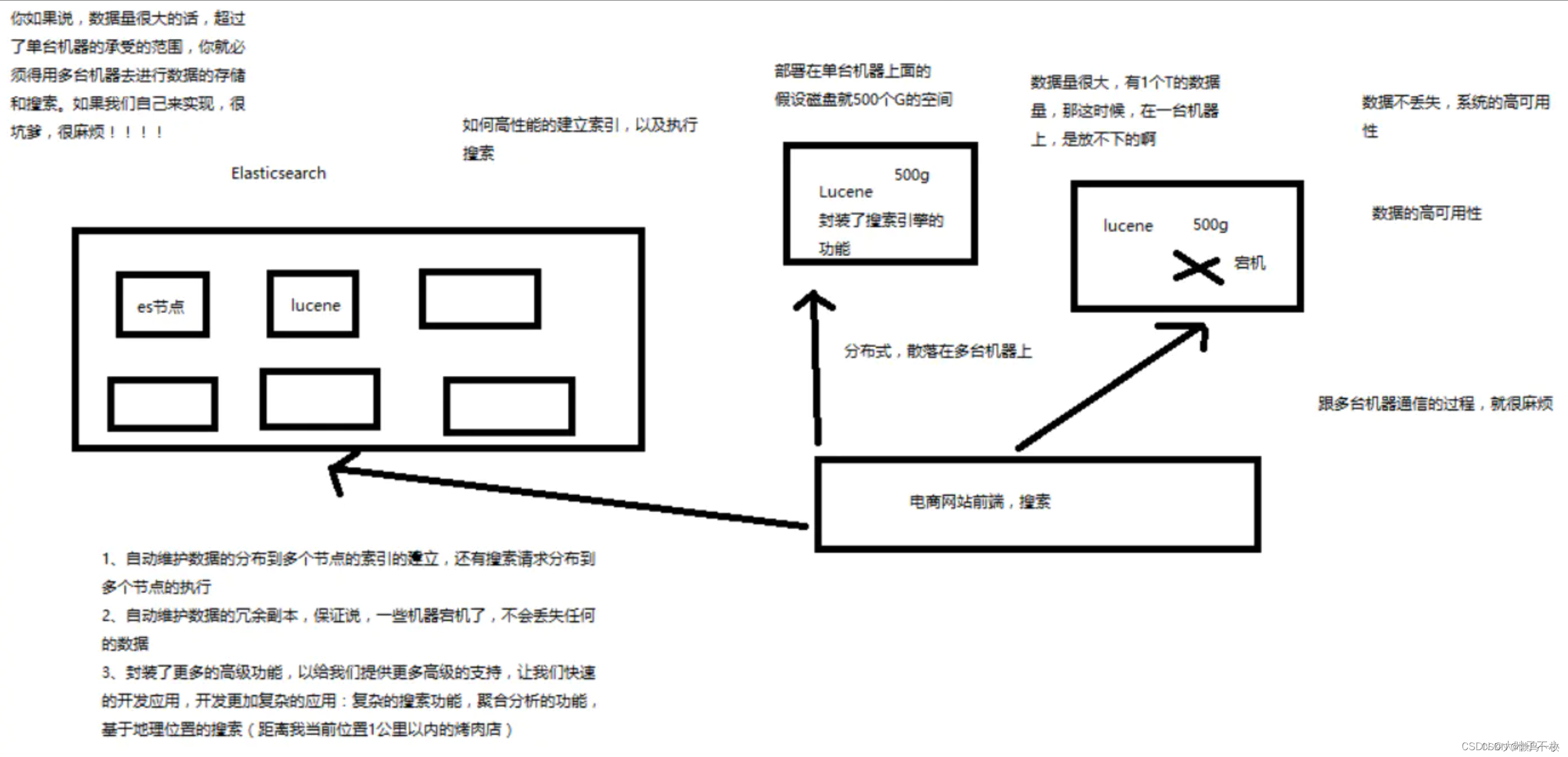
Lucene
lucene,就是一个jar包,里面包含了封装好的各种建立倒排索引,以及进行搜索的代码,包括各种算法。我们就用java开发的时候,引入lucene jar,然后基于lucene的api进行去进行开发就可以了。
用lucene,我们就可以去将已有的数据建立索引,lucene会在本地磁盘上面,给我们组织索引的数据结构。另外的话,我们也可以用lucene提供的一些功能和api来针对磁盘上进行操作和查询。
Elasticsearch
Elasticsearch的功能,应用场景
1. 分布式的搜索引擎和数据分析引擎
搜索:百度,网站的站内搜索,IT系统的检索
数据分析:电商网站,最近7天牙膏这种商品销量排名前10的商家有哪些;新闻网站,最近1个月访问量排名前3的新闻版块是哪些
分布式,搜索,数据分析
2. 全文检索,结构化检索,数据分析
全文检索:我想搜索商品名称包含牙膏的商品,select * from products where product_name like “%牙膏%”
结构化检索:我想搜索商品分类为日化用品的商品都有哪些,select * from products where category_id=‘日化用品’
部分匹配、自动完成、搜索纠错、搜索推荐
数据分析:我们分析每一个商品分类下有多少个商品,select category_id,count(*) from products group by category_id
3. 对海量数据进行近实时的处理
分布式:ES自动可以将海量数据分散到多台服务器上去存储和检索
海联数据的处理:分布式以后,就可以采用大量的服务器去存储和检索数据,自然而然就可以实现海量数据的处理了
近实时:检索个数据要花费1小时(这就不要近实时,离线批处理,batch-processing);在秒级别对数据进行搜索和分析
跟分布式/海量数据相反的:lucene,单机应用,只能在单台服务器上使用,最多只能处理单台服务器可以处理的数据量
elasticsearch的核心概念
-
Near Realtime(RT):近实时,数据被写入到es 到可以被搜索到这个时间 在一秒内可以完成。
-
Cluster:集群,包含多个节点,每个节点属于哪个集群是通过一个配置(集群名称,默认是elasticsearch)来决定的,对于中小型应用来说,刚开始一个集群就一个节点很正常
-
Node:节点,集群中的一个节点,节点也有一个名称(默认是随机分配的),节点名称很重要(在执行运维管理操作的时候),默认节点会去加入一个名称为“elasticsearch”的集群,如果直接启动一堆节点,那么它们会自动组成一个elasticsearch集群,当然一个节点也可以组成一个elasticsearch集群
-
Document&field:文档,es中的最小数据单元,一个document可以是一条客户数据,一条商品分类数据,一条订单数据,通常用JSON数据结构表示,
每个index下的type中,都可以去存储多个document。一个document里面有多个field,每个field就是一个数据字段。
{
"product_id": "1",
"product_name": "高露洁牙膏",
"product_desc": "高效美白",
"category_id": "2",
"category_name": "日化用品"
}
- Index:索引,包含一堆有相似结构的文档数据,比如可以有一个客户索引,商品分类索引,订单索引,索引有一个名称。一个index包含很多document,一个index就代表了一类类似的或者相同的document。比如说建立一个product index,商品索引,里面可能就存放了所有的商品数据,所有的商品document。
- Type:类型,每个索引里都可以有一个或多个type,type是index中的一个逻辑数据分类,一个type下的document,都有相同的field,比如博客系统,有一个索引,可以定义用户数据type,博客数据type,评论数据type。
type,日化商品type,电器商品type,生鲜商品type
日化商品type:product_id,product_name,product_desc,category_id,category_name
电器商品type:product_id,product_name,product_desc,category_id,category_name,service_period
生鲜商品type:product_id,product_name,product_desc,category_id,category_name,eat_period
每一个type里面,都会包含一堆document,类型于数据库中,这里的每一行数据就是一个document,
{
"product_id": "2",
"product_name": "长虹电视机",
"product_desc": "4k高清",
"category_id": "3",
"category_name": "电器",
"service_period": "1年"
}
{
"product_id": "3",
"product_name": "基围虾",
"product_desc": "纯天然,冰岛产",
"category_id": "4",
"category_name": "生鲜",
"eat_period": "7天"
}
-
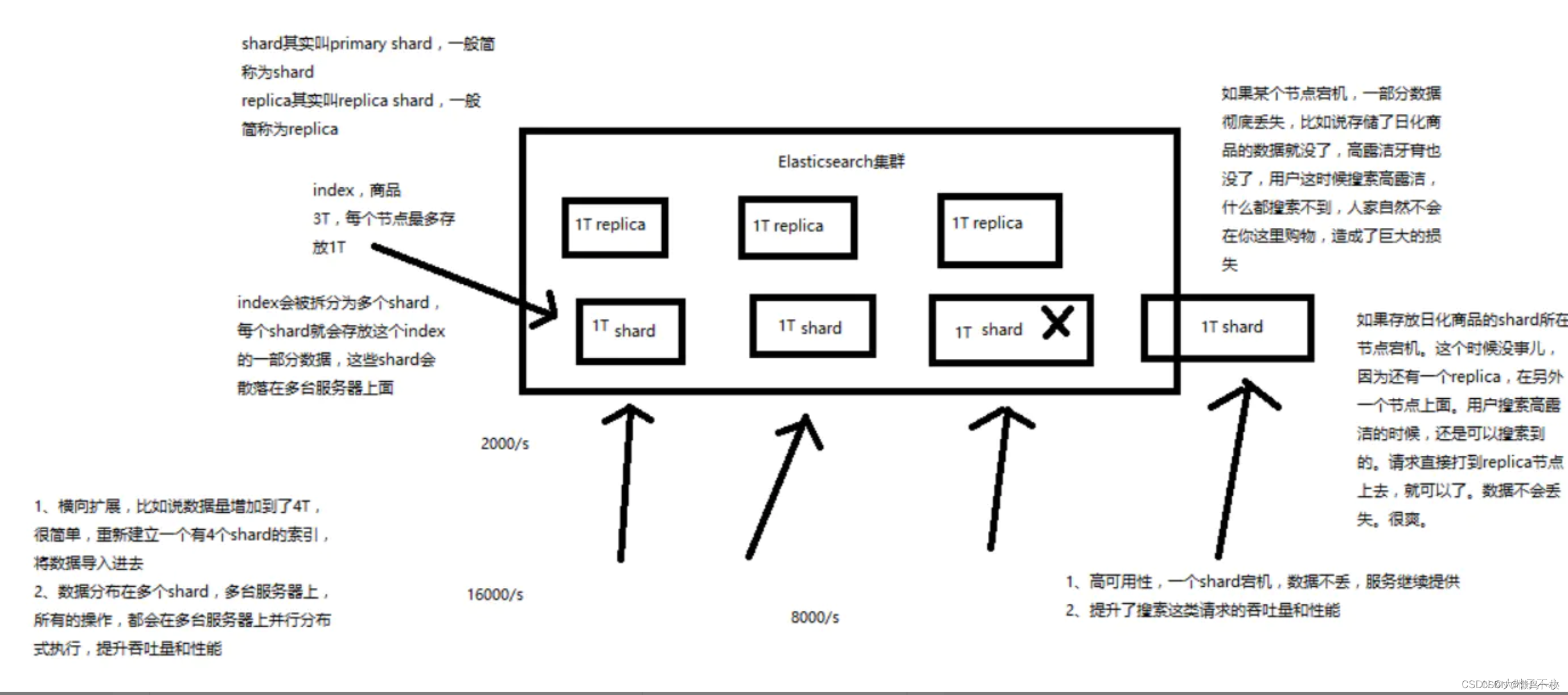
shard:单台机器无法存储大量数据,es可以将一个索引中的数据切分为多个shard,分布在多台服务器上存储。有了shard就可以横向扩展,存储更多数据,让搜索和分析等操作分布到多台服务器上去执行,提升吞吐量和性能。每个shard都是一个lucene index。因为ES是分布式架构,类似于HDFS的存储方式,所以数据被打散存储在集群的多个节点上,一个分片实际上就是底层Lucene的一个索引,这里说的分片指的是ES中的主分片(因为还有副本分片一说),分片的方式是ES自动完成,用户可以指定分片的数量,主分片一旦指定就不能修改,因为ES打散数据的方式是和索引创建时指定的主分片数量有关(路由算法公式:shard=hash(routing)%number_of_primary_shards,进行文档分配),后期改变会导致分片中的数据不可搜索。
-
replica:任何一个服务器随时可能故障或宕机,此时shard可能就会丢失,因此可以为每个shard创建多个replica副本。replica可以在shard故障时提供备用服务,保证数据不丢失,多个replica还可以提升搜索操作的吞吐量和性能。**primary shard(建立索引时一次设置,不能修改,默认5个),replica shard(随时修改数量,默认1个),默认每个索引10个shard,5个primary shard,5个replica shard,最小的高可用配置,是2台服务器。 副本就是分片的一个拷贝,不仅能提高自身容灾,另外,请求量很大的情况下,副本可以分担主Shard压力,承担查询功能。副本个数还以在创建完索引后灵活调整
ES实现写入和读取的原理
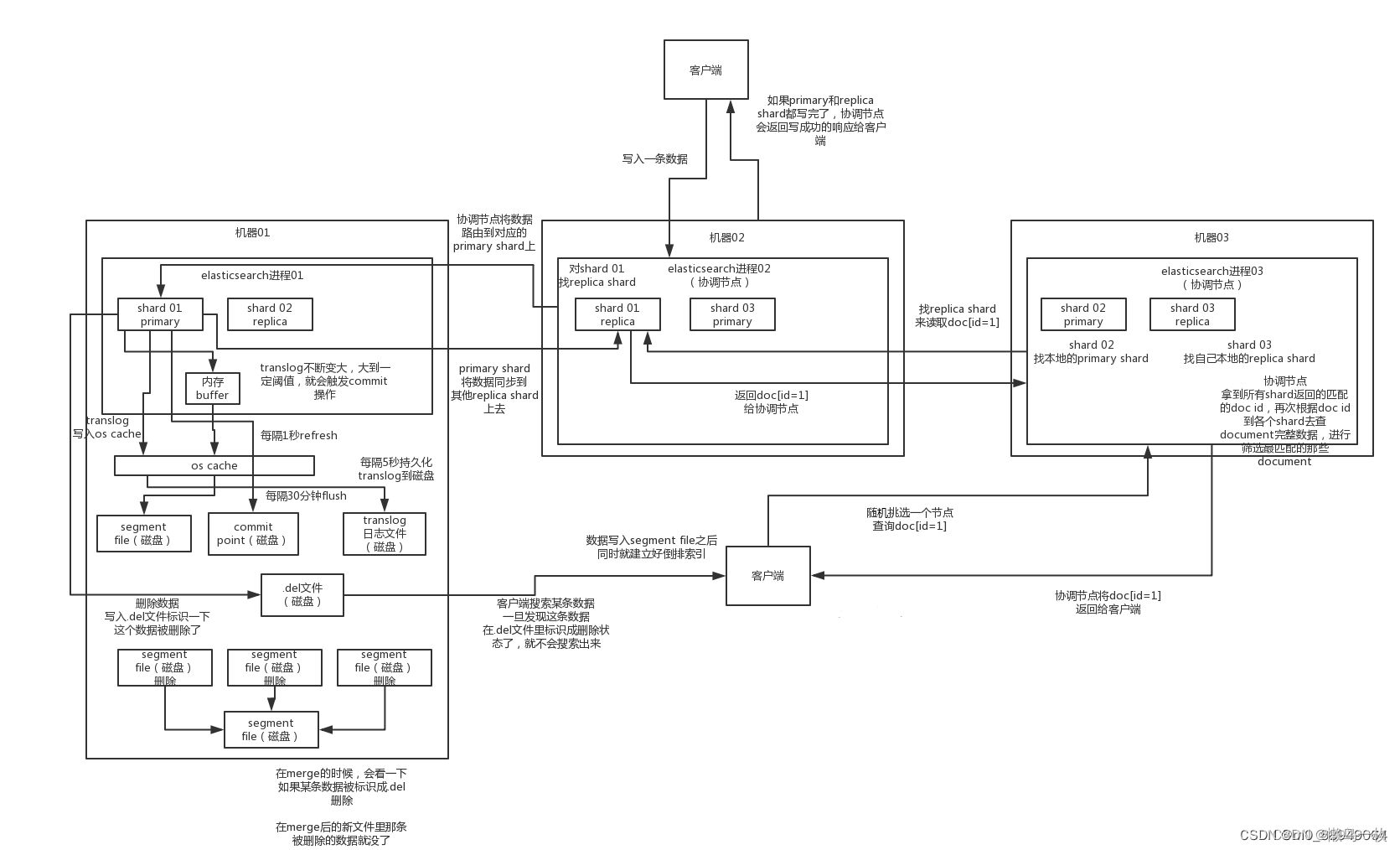
(1)ES写数据过程
- 客户端随机选择一个node发送请求过去,这个node就是coordinating node(协调节点)
- coordinating node,对document进行路由,将请求转发给对应的node(有primary shard)
- 实际的node上的primary shard处理请求,然后将数据同步到replica node
- coordinating node,如果发现primary node和所有replica node都搞定之后,就返回响应结果给客户端
- 在写primary shard的过程中同时还要持久到本地 :
1)先写入buffer,在buffer里的时候数据是搜索不到的;同时将数据写入translog日志文件
2)如果buffer快满了,或者到一定时间,就会将buffer数据refresh到一个新的segment file中,但是此时数据不是直接进入segment file的磁盘文件的,而是先进入os cache的。这个过程就是refresh。
每隔1秒钟,es将buffer中的数据写入一个新的segment file,每秒钟会产生一个新的磁盘文件,segment file,这个segment file中就存储最近1秒内buffer中写入的数据
但是如果buffer里面此时没有数据,那当然不会执行refresh操作咯,每秒创建换一个空的segment file,如果buffer里面有数据,默认1秒钟执行一次refresh操作,刷入一个新的segment file中
操作系统里面,磁盘文件其实都有一个东西,叫做os cache,操作系统缓存,就是说数据写入磁盘文件之前,会先进入os cache,先进入操作系统级别的一个内存缓存中去
只要buffer中的数据被refresh操作,刷入os cache中,就代表这个数据就可以被搜索到了
为什么叫es是准实时的?NRT,near real-time,准实时。默认是每隔1秒refresh一次的,所以es是准实时的,因为写入的数据1秒之后才能被看到。
可以通过es的restful api或者java api,手动执行一次refresh操作,就是手动将buffer中的数据刷入os cache中,让数据立马就可以被搜索到。
只要数据被输入os cache中,buffer就会被清空了,因为不需要保留buffer了,数据在translog里面已经持久化到磁盘去一份了
3)只要数据进入os cache,此时就可以让这个segment file的数据对外提供搜索了
4)重复1~3步骤,新的数据不断进入buffer和translog,不断将buffer数据写入一个又一个新的segment file中去,每次refresh完buffer清空,translog保留。随着这个过程推进,translog会变得越来越大。当translog达到一定长度的时候,就会触发commit操作。
buffer中的数据,倒是好,每隔1秒就被刷到os cache中去,然后这个buffer就被清空了。所以说这个buffer的数据始终是可以保持住不会填满es进程的内存的。
每次一条数据写入buffer,同时会写入一条日志到translog日志文件中去,所以这个translog日志文件是不断变大的,当translog日志文件大到一定程度的时候,就会执行commit操作。
5)commit操作发生第一步,就是将buffer中现有数据refresh到os cache中去,清空buffer
6)将一个commit point写入磁盘文件,里面标识着这个commit point对应的所有segment file
7)强行将os cache中目前所有的数据都fsync到磁盘文件中去
translog日志文件的作用是什么?就是在你执行commit操作之前,数据要么是停留在buffer中,要么是停留在os cache中,无论是buffer还是os cache都是内存,一旦这台机器死了,内存中的数据就全丢了。
所以需要将数据对应的操作写入一个专门的日志文件,translog日志文件中,一旦此时机器宕机,再次重启的时候,es会自动读取translog日志文件中的数据,恢复到内存buffer和os cache中去。
commit操作:
- 1、写commit point;
- 2、将os cache数据fsync强刷到磁盘上去;
- 3、清空translog日志文件
8)将现有的translog清空,然后再次重启启用一个translog,此时commit操作完成。默认每隔30分钟会自动执行一次commit,但是如果translog过大,也会触发commit。整个commit的过程,叫做flush操作。我们可以手动执行flush操作,就是将所有os cache数据刷到磁盘文件中去。
不叫做commit操作,flush操作。es中的flush操作,就对应着commit的全过程。我们也可以通过es api,手动执行flush操作,手动将os cache中的数据fsync强刷到磁盘上去,记录一个commit point,清空translog日志文件。
9)translog其实也是先写入os cache的,默认每隔5秒刷一次到磁盘中去,所以默认情况下,可能有5秒的数据会仅仅停留在buffer或者translog文件的os cache中,如果此时机器挂了,会丢失5秒钟的数据。但是这样性能比较好,最多丢5秒的数据。也可以将translog设置成每次写操作必须是直接fsync到磁盘,但是性能会差很多。
其实es第一是准实时的,数据写入1秒后可以搜索到;可能会丢失数据的,你的数据有5秒的数据,停留在buffer、translog os cache、segment file os cache中,有5秒的数据不在磁盘上,此时如果宕机,会导致5秒的数据丢失。
如果你希望一定不能丢失数据的话,你可以设置个参数,官方文档,百度一下。每次写入一条数据,都是写入buffer,同时写入磁盘上的translog,但是这会导致写性能、写入吞吐量会下降一个数量级。本来一秒钟可以写2000条,现在你一秒钟只能写200条,都有可能。
10)如果是删除操作,commit的时候会生成一个.del文件,里面将某个doc标识为deleted状态,那么搜索的时候根据.del文件就知道这个doc被删除了
11)如果是更新操作,就是将原来的doc标识为deleted状态,然后新写入一条数据
12)buffer每次refresh一次,就会产生一个segment file,所以默认情况下是1秒钟一个segment file,segment file会越来越多,此时会定期执行merge
13)每次merge的时候,会将多个segment file合并成一个,同时这里会将标识为deleted的doc给物理删除掉,然后将新的segment file写入磁盘,这里会写一个commit point,标识所有新的segment file,然后打开segment file供搜索使用,同时删除旧的segment file。
es里的写流程,有4个底层的核心概念,refresh、flush、translog、merge
当segment file多到一定程度的时候,es就会自动触发merge操作,将多个segment file给merge成一个segment file
(2)ES读数据过程
查询,GET某一条数据,写入了某个document,这个document会自动给你分配一个全局唯一的id,即doc id,同时也是根据doc id进行hash路由到对应的primary shard上面去。也可以手动指定doc id,比如用订单id,用户id。
你可以通过doc id来查询,会根据doc id进行hash,判断出来当时把doc id分配到了哪个shard上面去,从那个shard去查询
1)客户端发送请求到任意一个node,成为coordinate node
2)coordinate node对document进行路由,将请求转发到对应的node,此时会使用round-robin随机轮询算法,在primary shard以及其所有replica shard中随机选择一个,让读请求负载均衡
3)接收请求的node返回document给coordinate node
4)coordinate node返回document给客户端
(3)ES搜索数据过程
1)客户端发送请求到一个coordinate node
2)协调节点将搜索请求转发到所有的shard对应的primary shard或replica shard也可以
3)query phase:每个shard将自己的搜索结果(其实就是一些doc id),返回给协调节点,由协调节点进行数据的合并、排序、分页等操作,产出最终结果
4)fetch phase:接着由协调节点,根据doc id去各个节点上拉取实际的document数据,最终返回给客户端
(4)搜索的底层原理,倒排索引,用表格说明传统数据库和倒排索引的区别(自上而下)
| 关系型数据库(比如Mysql) | 非关系型数据库(Elasticsearch) |
|---|---|
| 数据库 DB | 索引 Index |
| 表 Table | 类型 Type |
| 数据行 Row | 文档 Document |
| 数据列 Column | 字段 Field |
| 约束 Schema | 映射 Mapping |
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 详谈抽象类和接口
- 制药巨头遭电子邮件攻击,损失超4500万
- 顺序表实现(下)(C语言)
- 微服务 Nacos服务注册与发现
- Spring Cloud Validation 使用正则表达式校验
- vue3父组件调用子组件el-dialog对话框
- 力扣刷题总结 栈与队列
- Go 语言运算符详解:加法、算术、赋值、比较、逻辑和位运算符全面解析
- Qt基础-QWidget背景图片设计时显示正常运行无法显示
- docker笔记3-dockerfile定制镜像