e2studio开发三轴加速度计LIS2DW12(4)----测量倾斜度
e2studio开发三轴加速度计LIS2DW12.4--测量倾斜度
- 概述
- 视频教学
- 样品申请
- 源码下载
- 计算倾斜角度
- 工作原理
- 单轴倾斜检测
- 双轴倾斜检测
- 三轴倾斜检测
- 通信模式
- 管脚定义
- IIC通信模式
- 速率
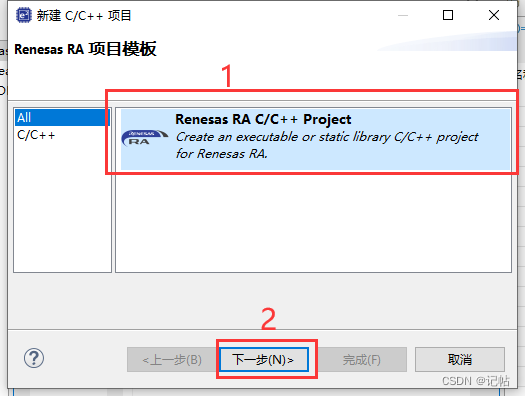
- 新建工程
- 工程模板
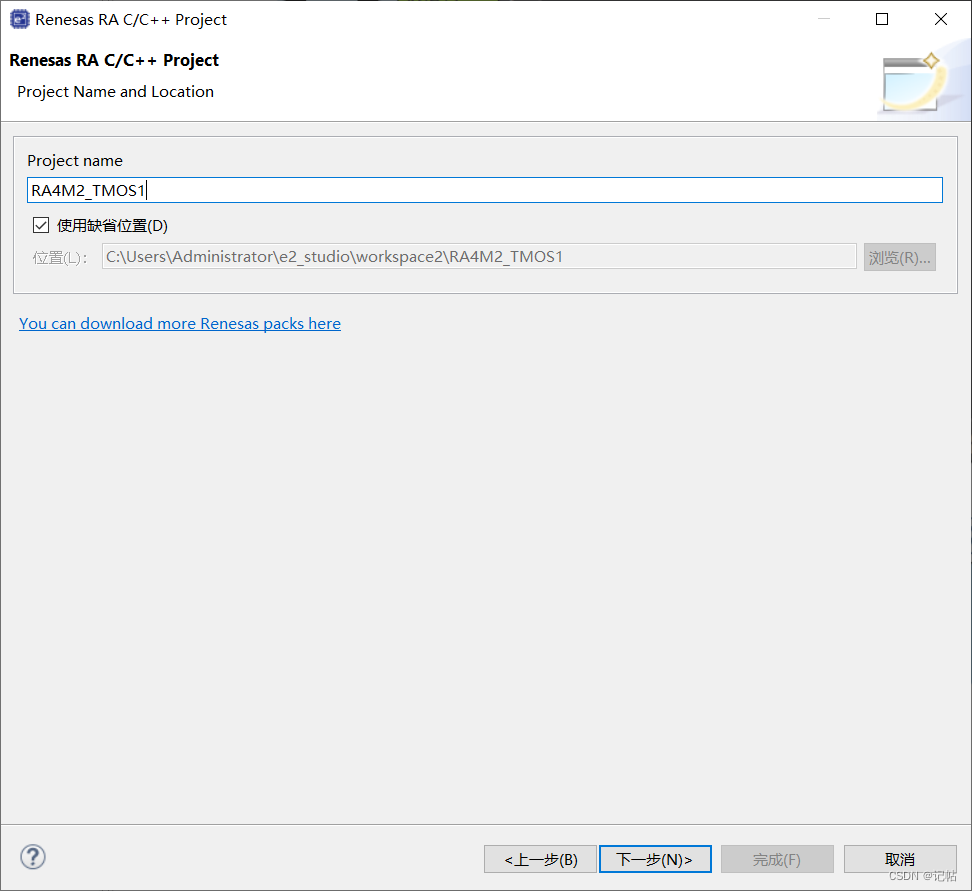
- 保存工程路径
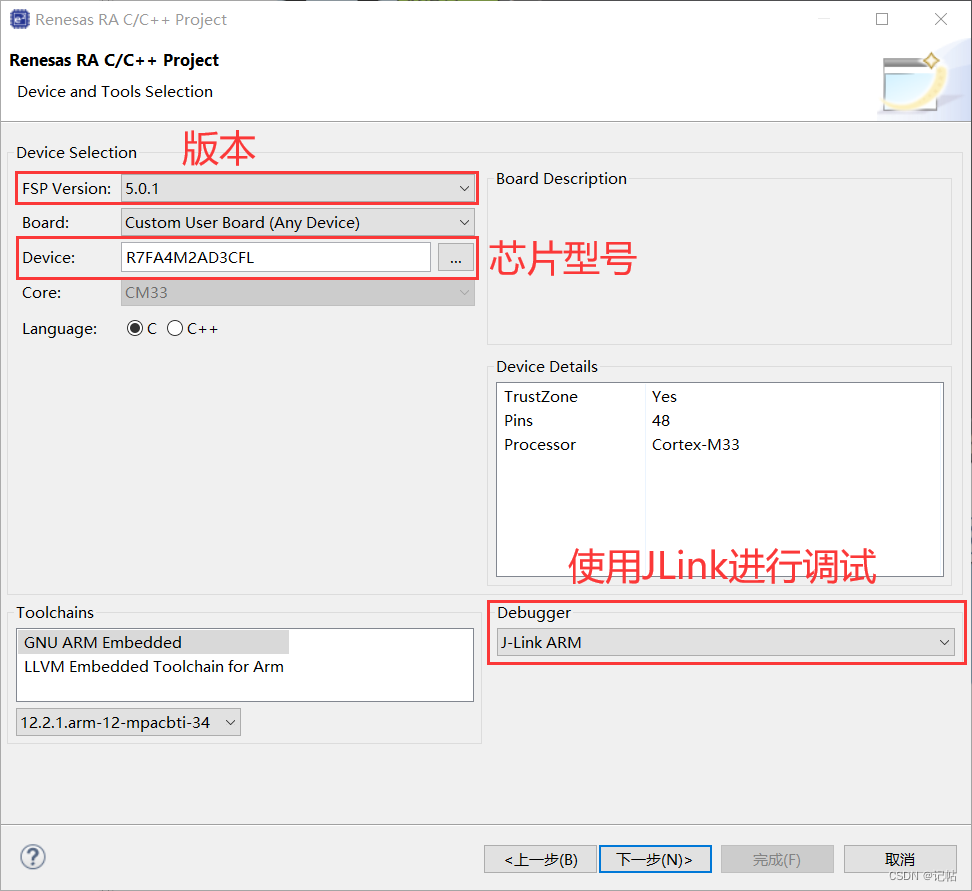
- 芯片配置
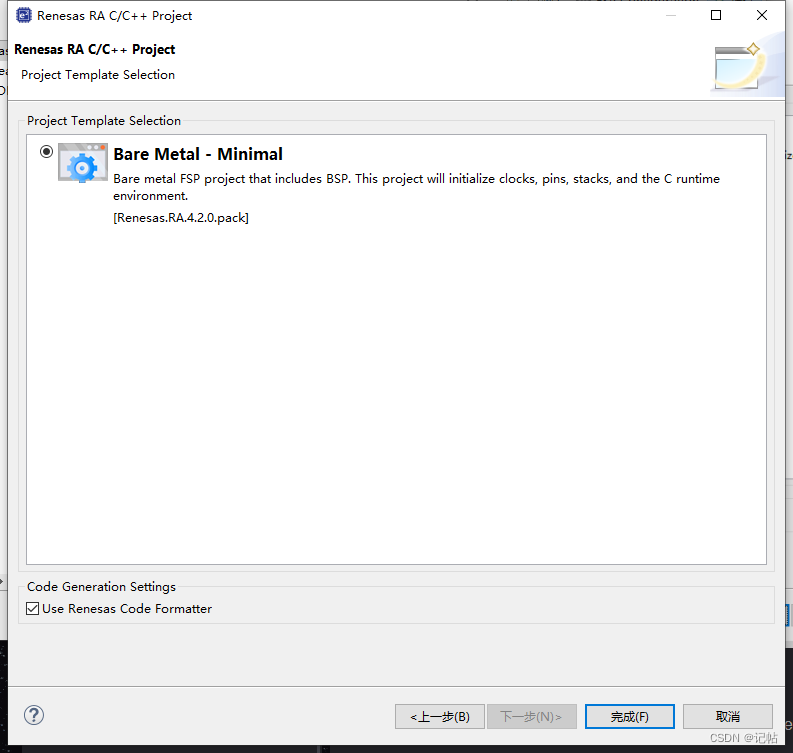
- 工程模板选择
- 时钟设置
- UART配置
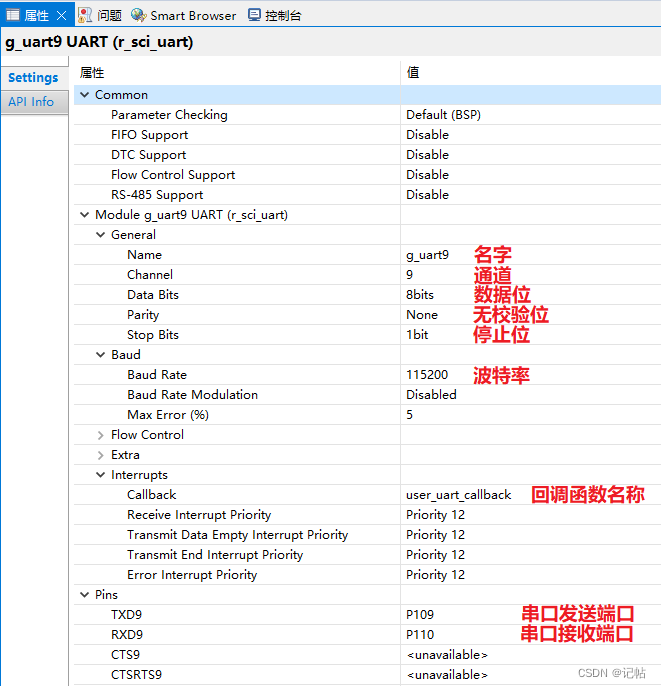
- UART属性配置
- 设置e2studio堆栈
- e2studio的重定向printf设置
- R_SCI_UART_Open()函数原型
- 回调函数user_uart_callback ()
- printf输出重定向到串口
- IIC属性配置
- 初始换管脚
- IIC配置
- R_IIC_MASTER_Open()函数原型
- R_IIC_MASTER_Write()函数原型
- R_IIC_MASTER_Read()函数原型
- sci_i2c_master_callback()回调函数
- 参考程序
- 初始换管脚
- 获取ID
- 复位操作
- BDU设置
- 设置传感器的量程
- 配置过滤器链
- 配置电源模式
- 设置输出数据速率
- 轮询获取加速度
- 计算倾角
- 演示
概述
本文将介绍如何驱动和利用LIS2DW12三轴加速度计的倾斜检测理论和倾斜角测量方法。一般来说,这里描述的程序也可以应用于三轴模拟或数字加速度计,这取决于它们各自的规格。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
计算倾斜角度
加速度计广泛用于消费电子和工业应用中的倾斜检测,如屏幕旋转和汽车安全报警系统。低g加速度计的另一个广泛用途是用于地图转换和个人导航设备的倾斜补偿式电子罗盘。该应用笔记描述了如何通过对一些可能导致角度倾斜计算错误的非理想因素进行补偿,从而准确测量相对于本地地球水平面的倾斜角度。
工作原理
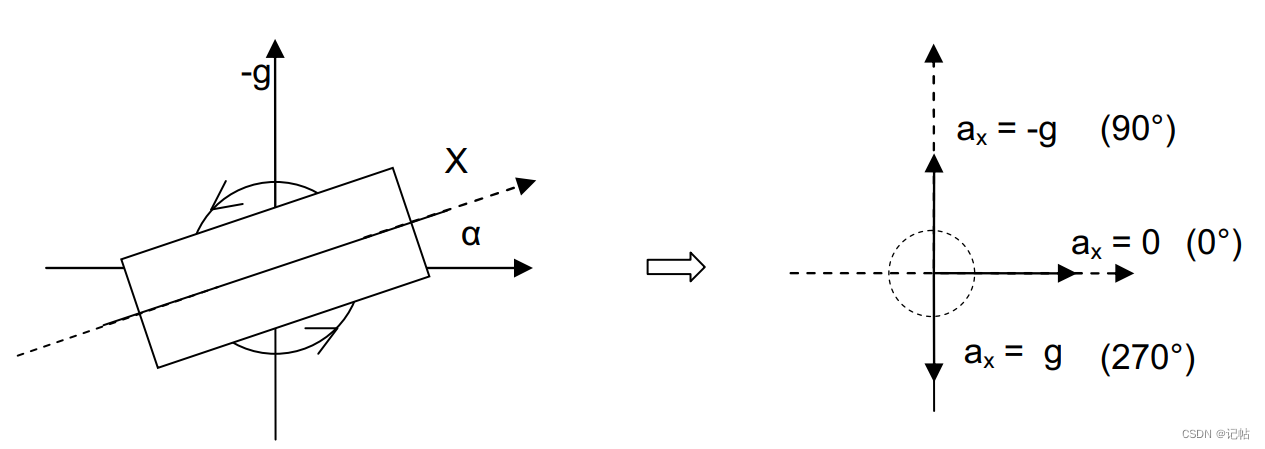
下图显示用于倾斜测量的加速度计的单一感应轴。

加速度计测量重力向量在感应轴上的映射。被测加速度的振幅随感应轴与水平面的夹角α的正弦值的变化而变化。
A=g*sin(α)
使用上面公式可以估算倾斜角度。
α=arcsin(A/g)
其中:
? A = 测量的加速度
? g = 地球的重力向量
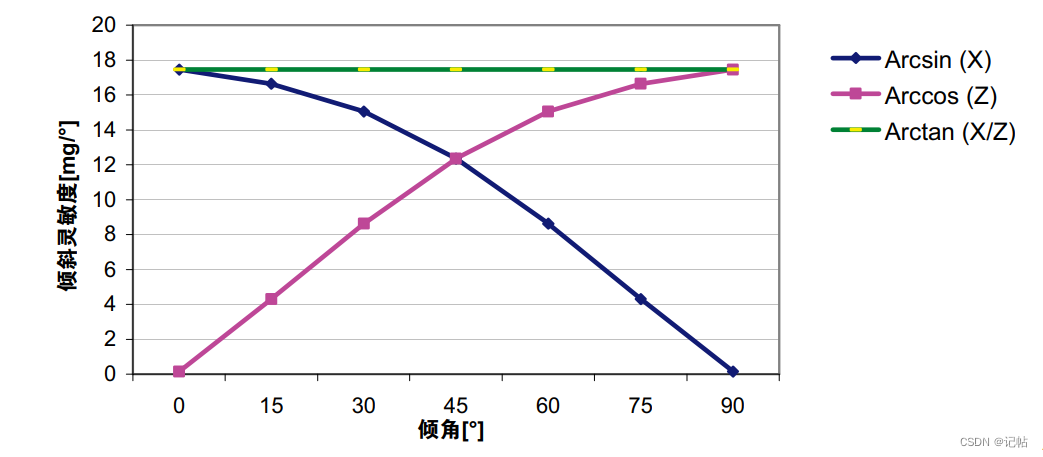
加速度计的单轴(360°旋转)显示在下图中。
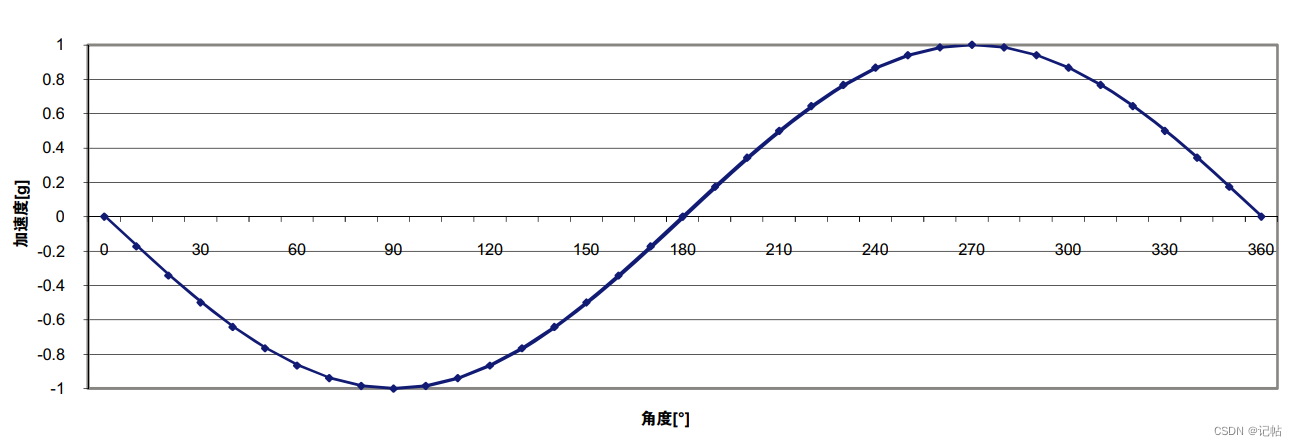
单轴倾斜检测
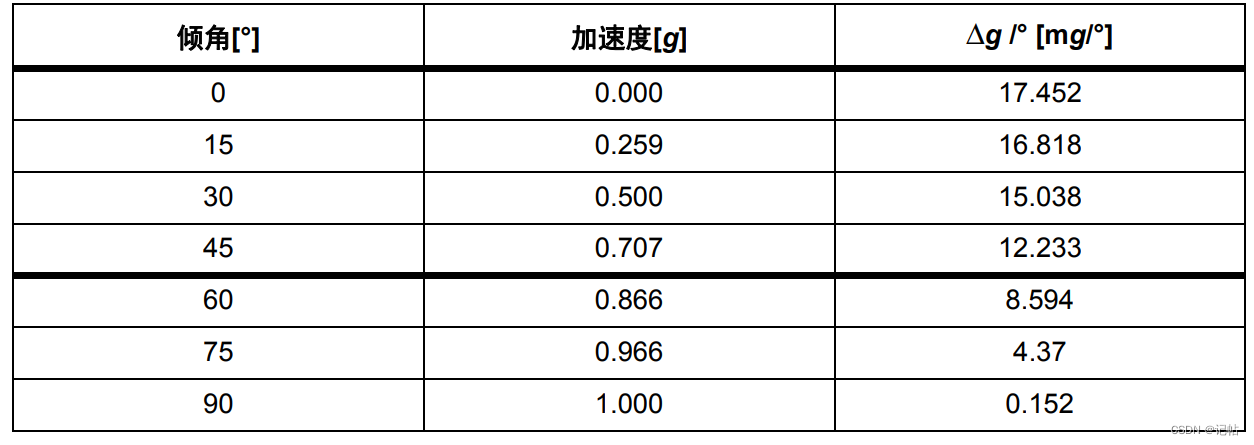
上图可以看出,当感应轴垂直于重力方向时,传感器对倾斜角度的变化最敏感。在这种情况下,灵敏度约为17.45 mg/° [= sin(1°) - sin(0°)]。由于正弦函数的导数函数,当感应轴接近其 +1 g 或 -1 g位置时,传感器的灵敏度较低(对倾斜角度变化的响应较慢)。在这种情况下,灵敏度仅有0.15 mg/° [= sin(90°) - sin(89°)]。表 1显示不同倾斜角度下的灵敏度。也就是说,如上图所示,正弦函数在[0° 45°]、[135° 225°]和[315°360°]处具有良好的线性度。
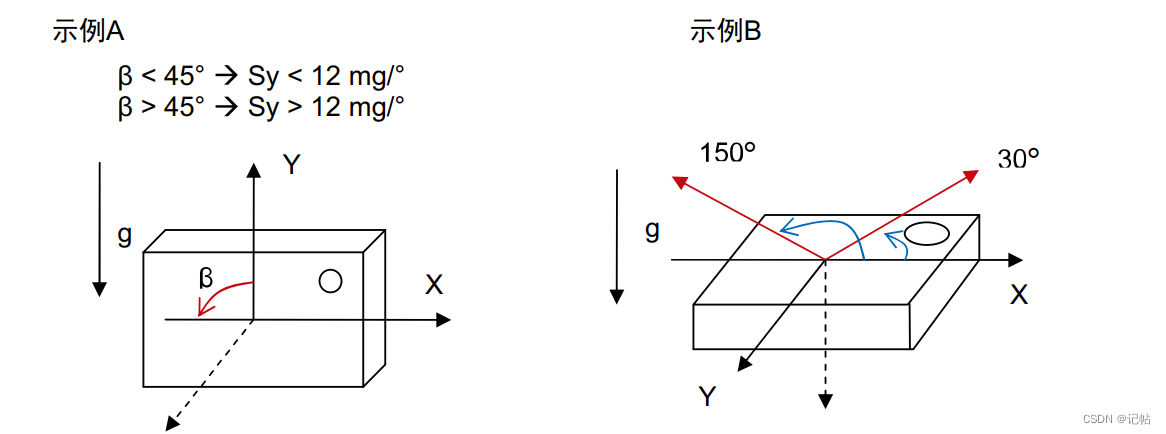
双轴倾斜检测
当使用双轴倾斜传感方法时,用户应了解在两种不同的情况下,这种方法可能会限制总体精度,甚至阻止倾斜计算。
例A:绕虚线箭头将加速度计逆时针旋转β角度。当β小于 45°时,X轴灵敏度较
高,Y轴灵敏度较低。当β大于 45°时,X轴灵敏度较低,Y轴灵敏度较高。因此,如果使用两轴方法,通常建议根据正交轴±1 g条件计算角度。
例B:在此位置,X轴和Y轴的灵敏度都很高。但是,如果不借助第三个轴(例如Z
轴),就不可能区分30°的倾斜角和150°的倾斜角,因为X轴在这两个倾斜角度具有相同的输出。
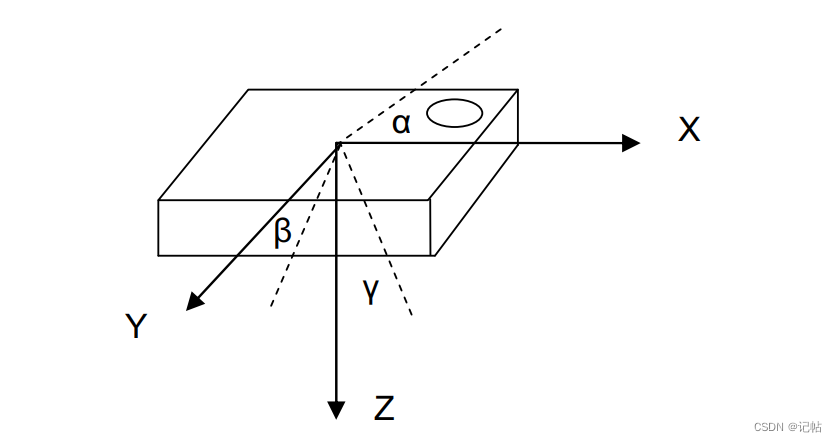
三轴倾斜检测
借助三轴加速度计,用户可以组合使用Z轴与X轴和Y轴进行倾斜感应,以提高倾斜灵敏度和精度。
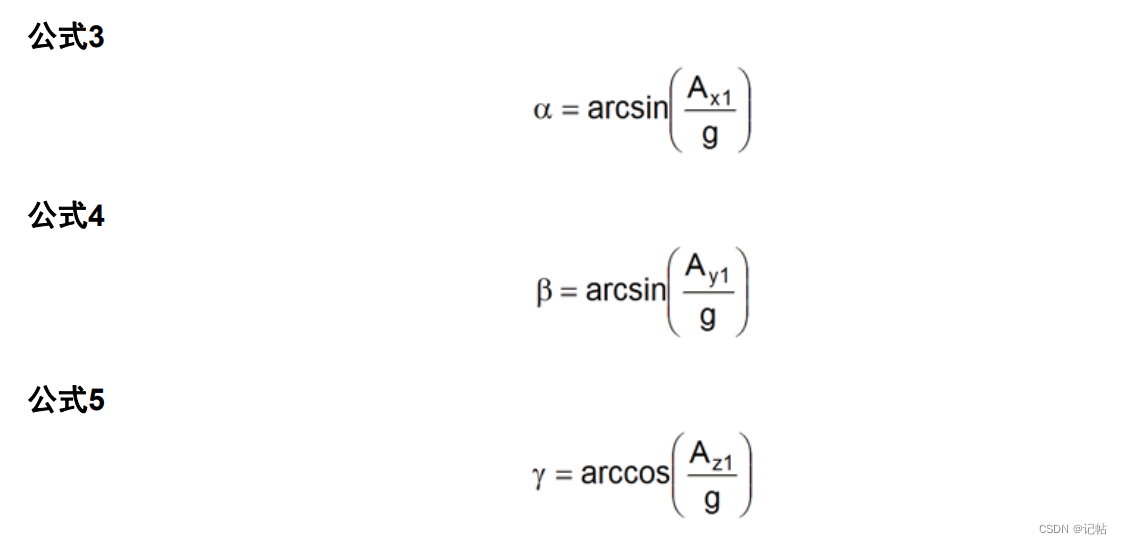
有两种方法计算图 5中的三个倾角。第一种方法是利用基本三角函数公式3、4和5,其中Ax1、Ay1和Az1是将加速度计校准应用到原始测量数据后得到的值(Ax、Ay、Az):
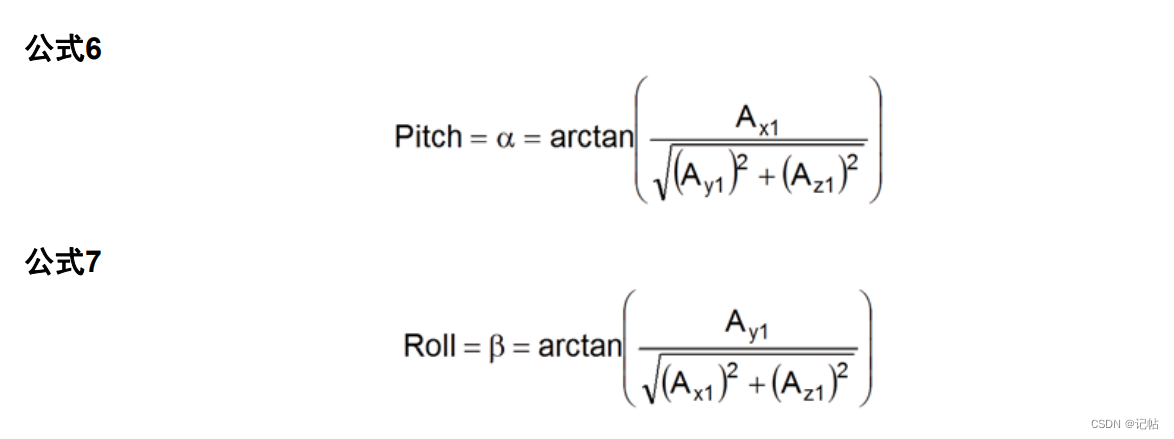
第二种方法是利用三角函数公式6和7计算俯仰和滚转倾斜角,在360度旋转时保持恒定灵敏度。
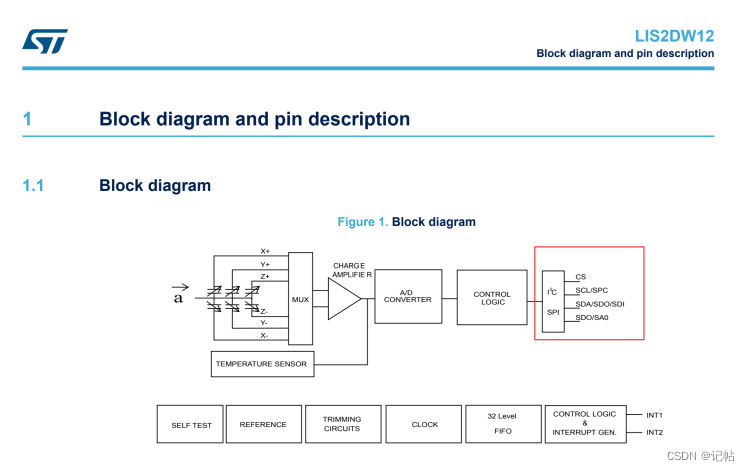
通信模式
对于LIS2DW12,可以使用SPI或者IIC进行通讯。
最小系统图如下所示。
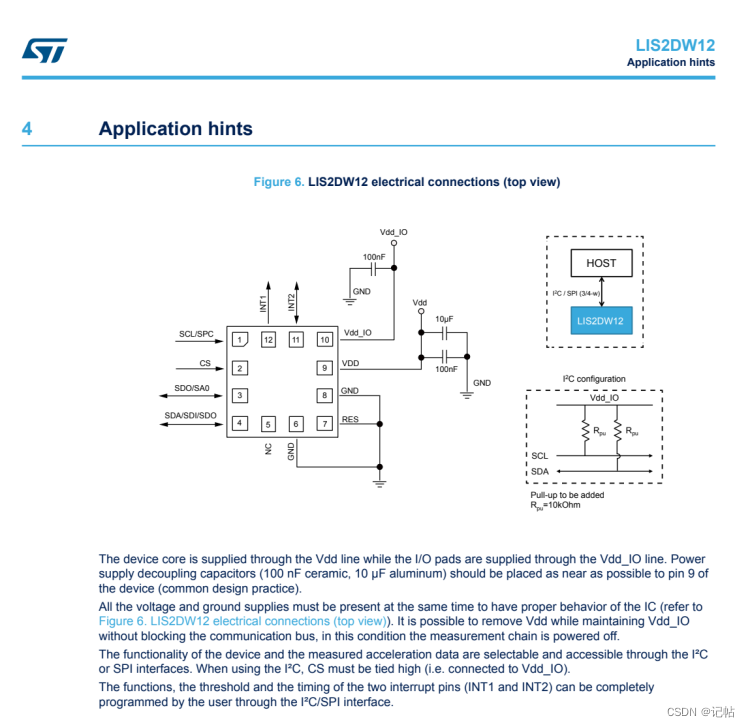
在CS管脚为1的时候,为IIC模式。
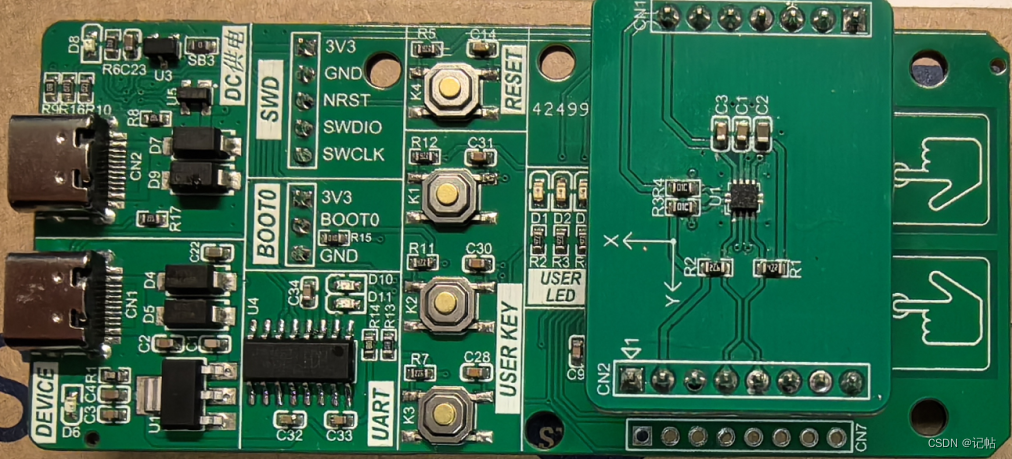
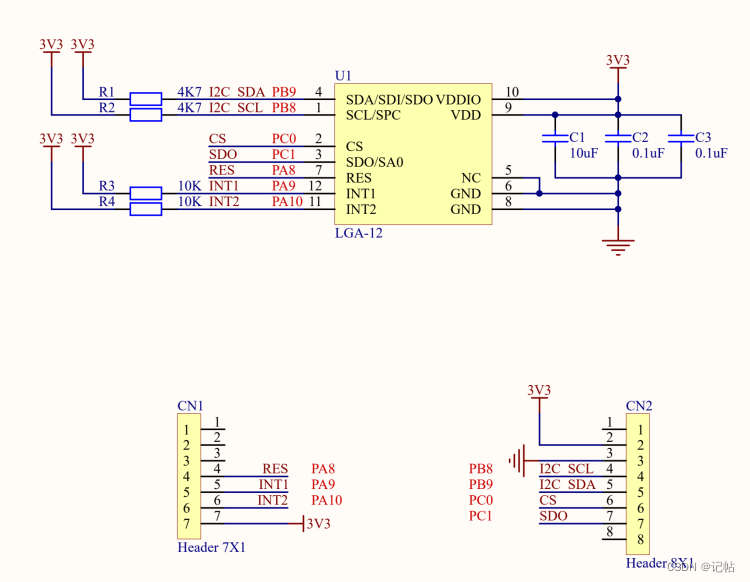
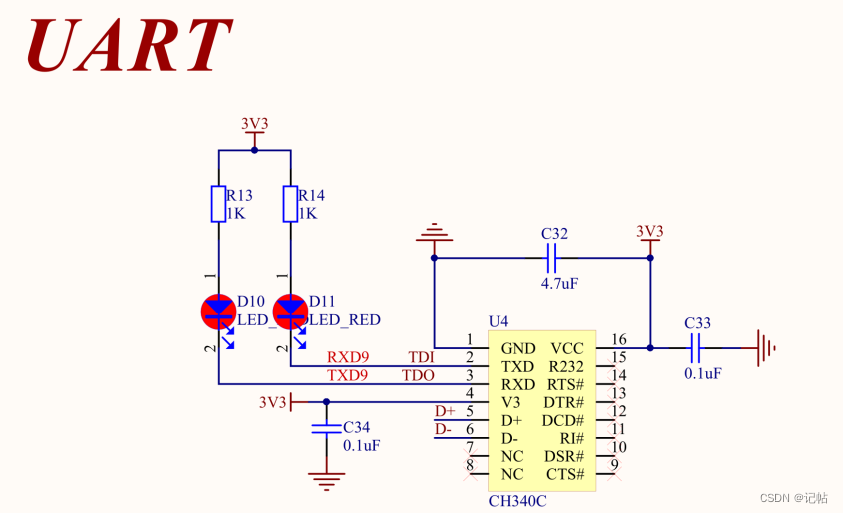
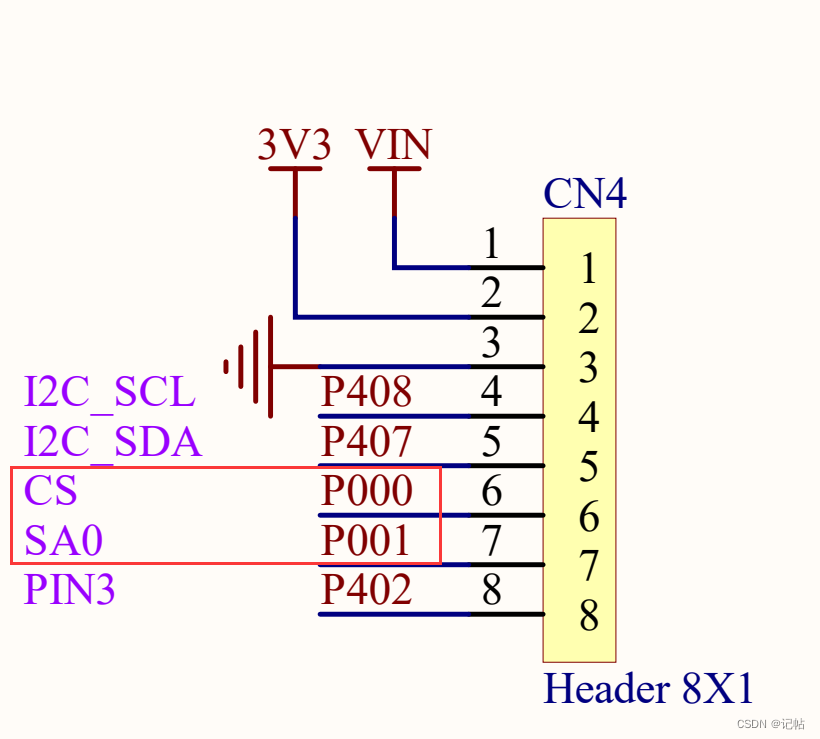
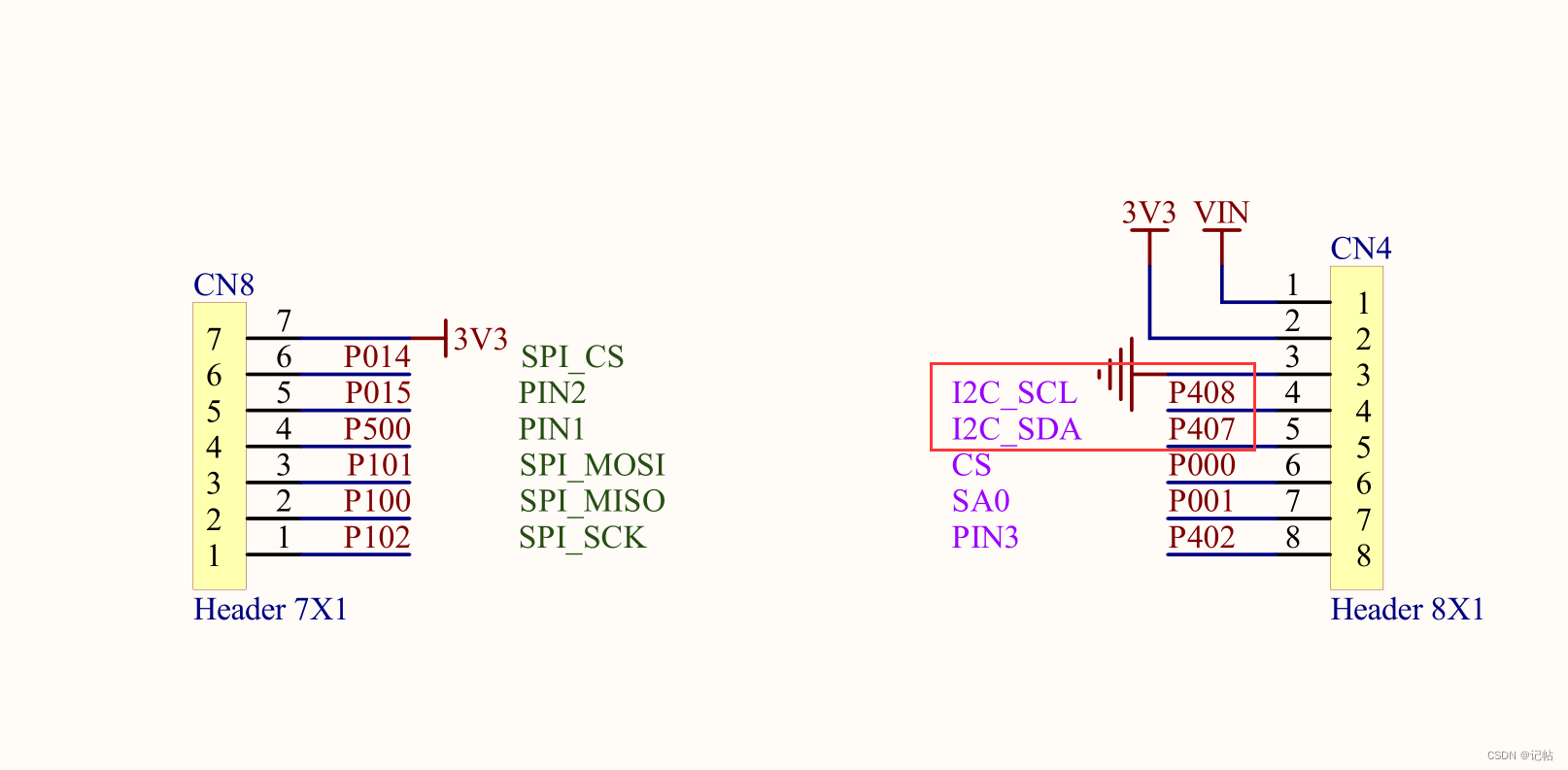
本文使用的板子原理图如下所示。
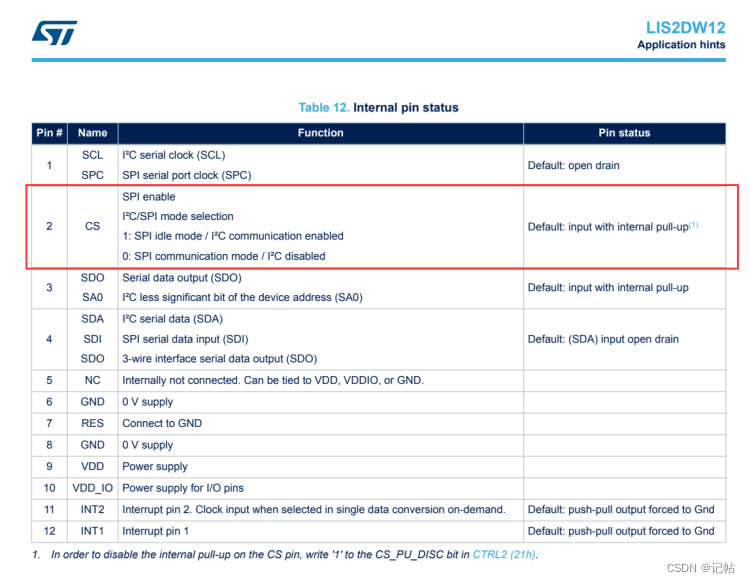
管脚定义
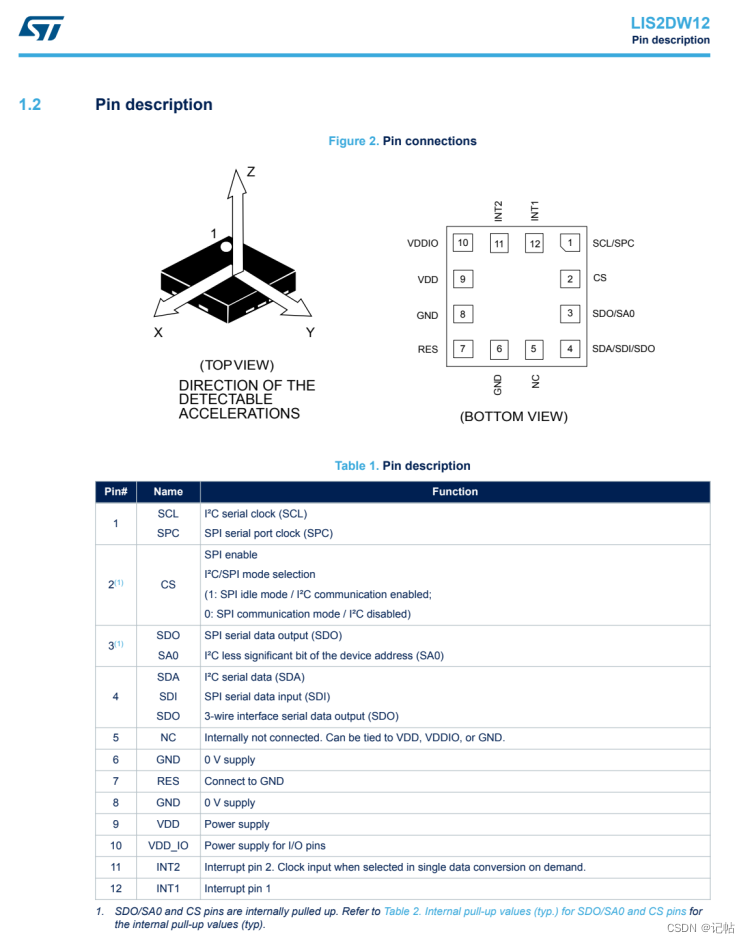
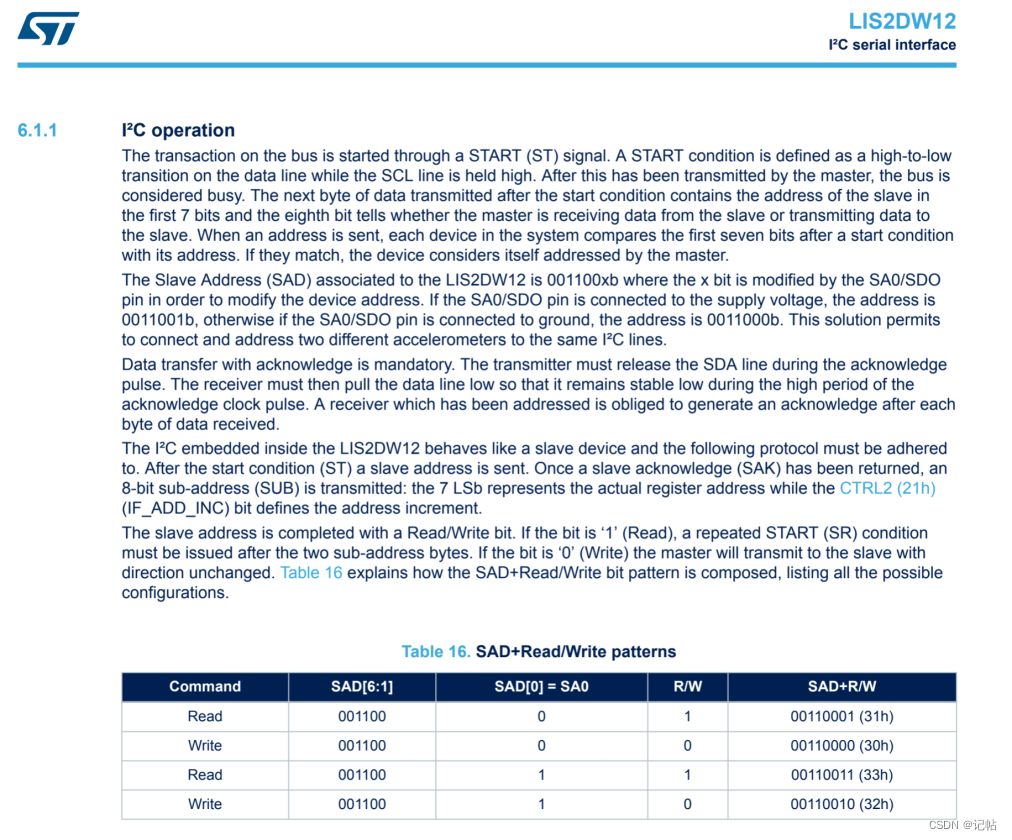
IIC通信模式
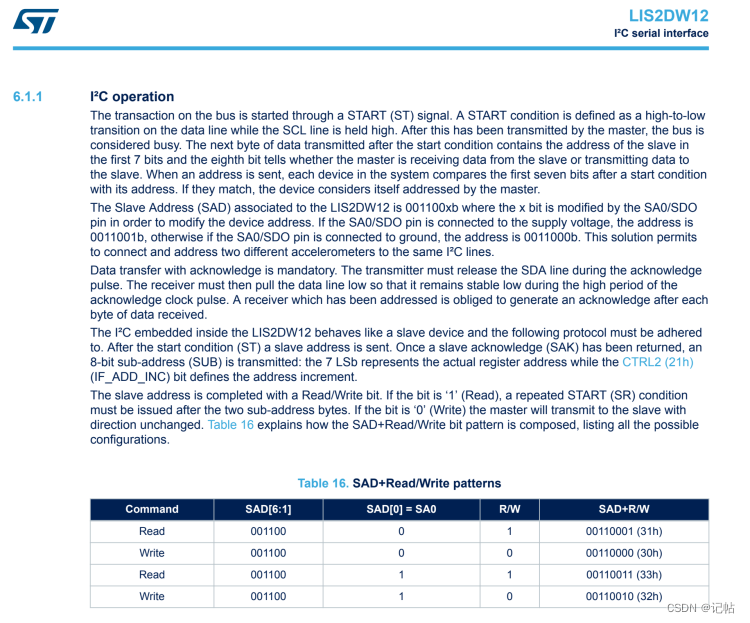
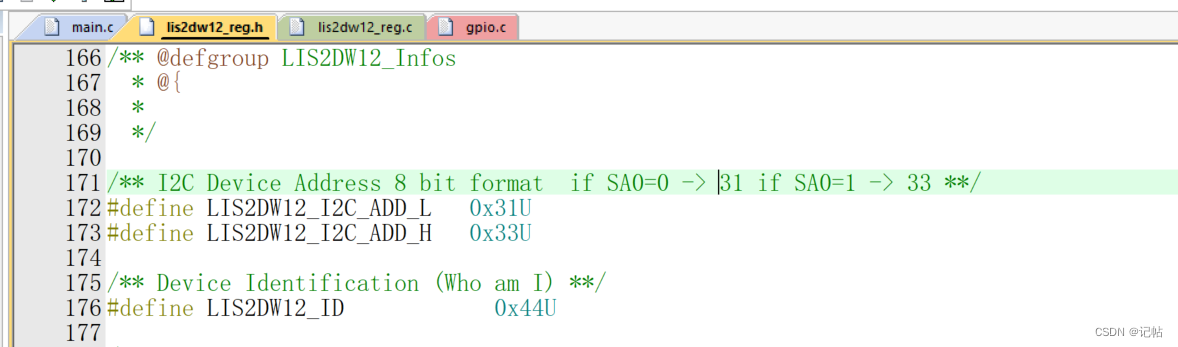
在使用IIC通讯模式的时候,SA0是用来控制IIC的地址位的。
对于IIC的地址,可以通过SDO/SA0引脚修改。SDO/SA0引脚可以用来修改设备地址的最低有效位。如果SDO/SA0引脚连接到电源电压,LSb(最低有效位)为’1’(地址0011001b);否则,如果SDO/SA0引脚连接到地线,LSb的值为’0’(地址0011000b)。
对应的IIC接口如下所示。
主要使用的管脚为CS、SCL、SDA、SA0。
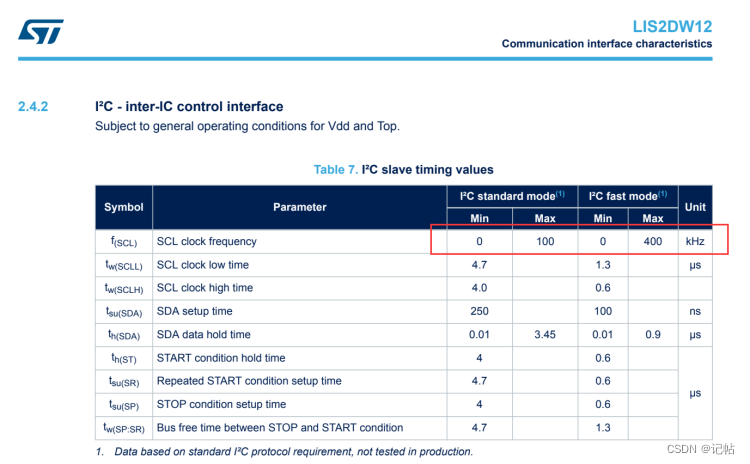
速率
该模块支持的速度为普通模式(100k)和快速模式(400k)。
新建工程

工程模板
保存工程路径
芯片配置
本文中使用R7FA4M2AD3CFL来进行演示。
工程模板选择
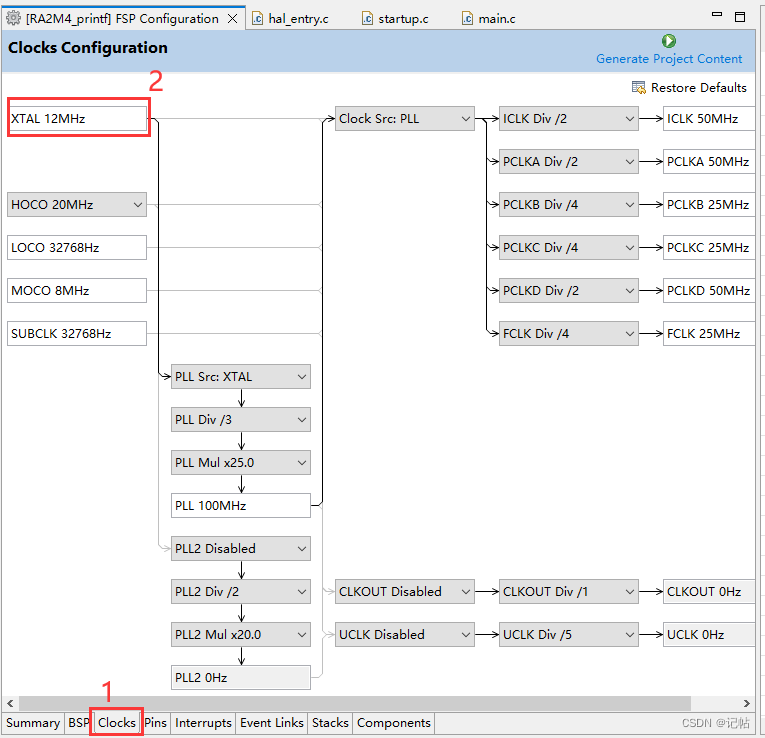
时钟设置
开发板上的外部高速晶振为12M.
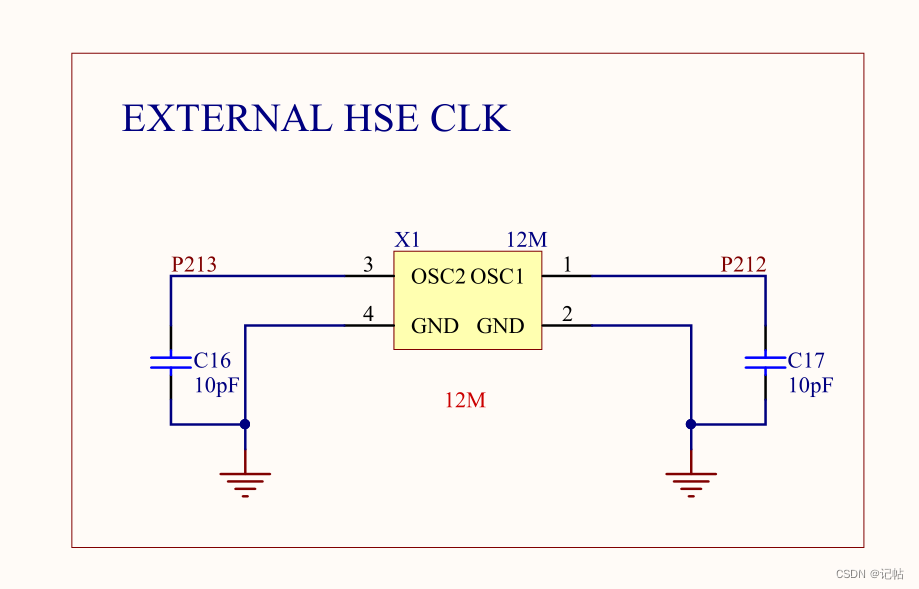
需要修改XTAL为12M。
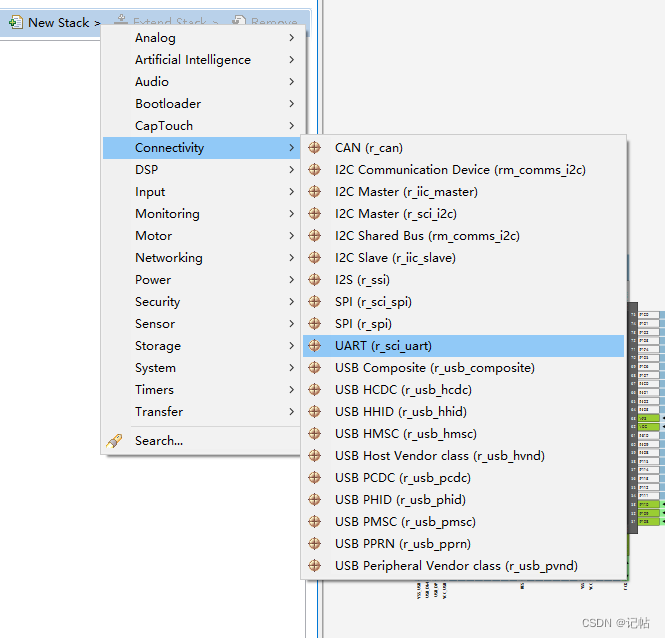
UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART属性配置
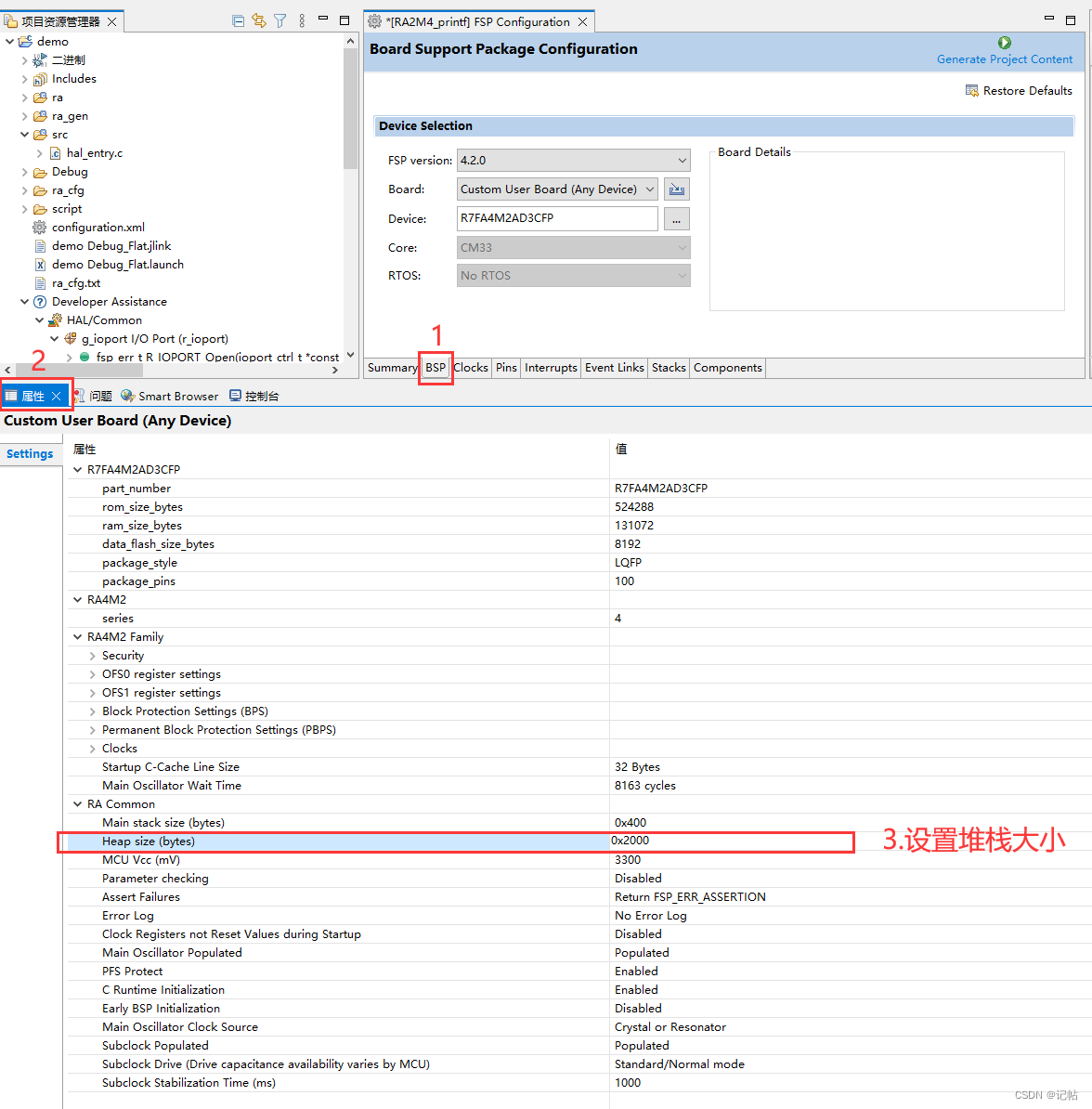
设置e2studio堆栈
printf函数通常需要设置堆栈大小。这是因为printf函数在运行时需要使用栈空间来存储临时变量和函数调用信息。如果堆栈大小不足,可能会导致程序崩溃或不可预期的行为。
printf函数使用了可变参数列表,它会在调用时使用栈来存储参数,在函数调用结束时再清除参数,这需要足够的栈空间。另外printf也会使用一些临时变量,如果栈空间不足,会导致程序崩溃。
因此,为了避免这类问题,应该根据程序的需求来合理设置堆栈大小。
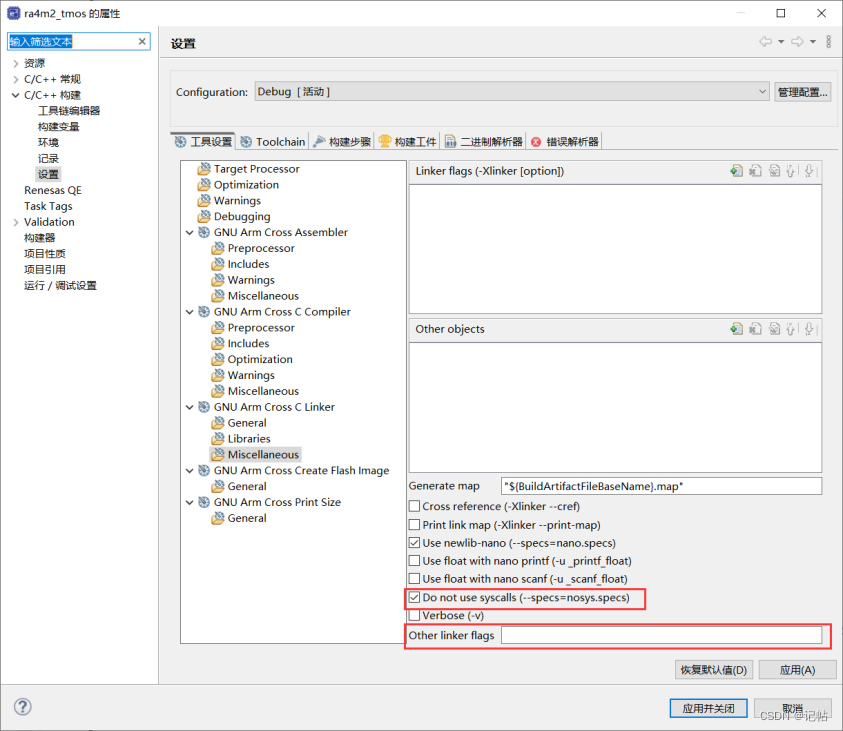
e2studio的重定向printf设置
在嵌入式系统的开发中,尤其是在使用GNU编译器集合(GCC)时,–specs 参数用于指定链接时使用的系统规格(specs)文件。这些规格文件控制了编译器和链接器的行为,尤其是关于系统库和启动代码的链接。–specs=rdimon.specs 和 --specs=nosys.specs 是两种常见的规格文件,它们用于不同的场景。
–specs=rdimon.specs
用途: 这个选项用于链接“Redlib”库,这是为裸机(bare-metal)和半主机(semihosting)环境设计的C库的一个变体。半主机环境是一种特殊的运行模式,允许嵌入式程序通过宿主机(如开发PC)的调试器进行输入输出操作。
应用场景: 当你需要在没有完整操作系统的环境中运行程序,但同时需要使用调试器来处理输入输出(例如打印到宿主机的终端),这个选项非常有用。
特点: 它提供了一些基本的系统调用,通过调试接口与宿主机通信。
–specs=nosys.specs
用途: 这个选项链接了一个非常基本的系统库,这个库不提供任何系统服务的实现。
应用场景: 适用于完全的裸机程序,其中程序不执行任何操作系统调用,比如不进行文件操作或者系统级输入输出。
特点: 这是一个更“裸”的环境,没有任何操作系统支持。使用这个规格文件,程序不期望有操作系统层面的任何支持。
如果你的程序需要与宿主机进行交互(如在开发期间的调试),并且通过调试器进行基本的输入输出操作,则使用 --specs=rdimon.specs。
如果你的程序是完全独立的,不需要任何形式的操作系统服务,包括不进行任何系统级的输入输出,则使用 --specs=nosys.specs。
R_SCI_UART_Open()函数原型
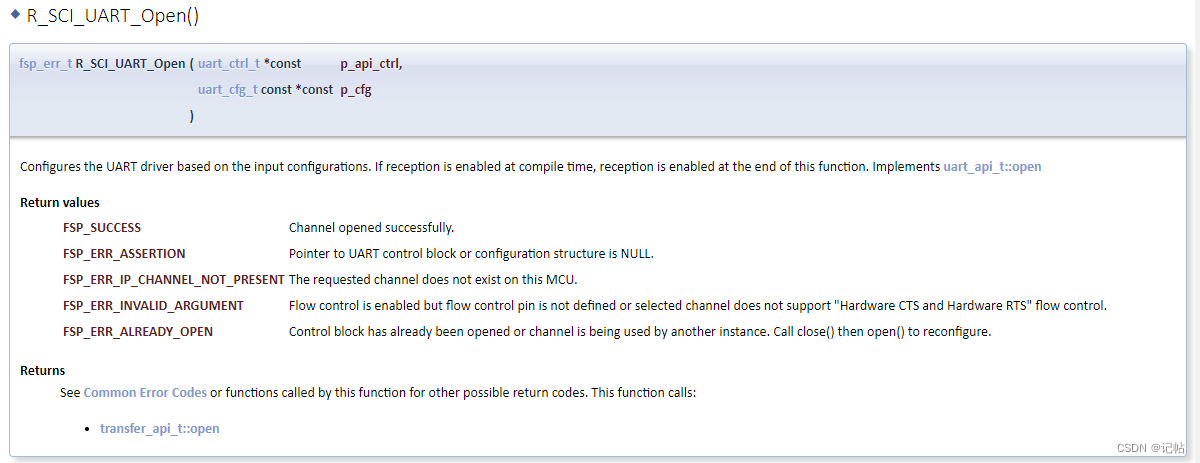
故可以用 R_SCI_UART_Open()函数进行配置,开启和初始化UART。
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
回调函数user_uart_callback ()
当数据发送的时候,可以查看UART_EVENT_TX_COMPLETE来判断是否发送完毕。
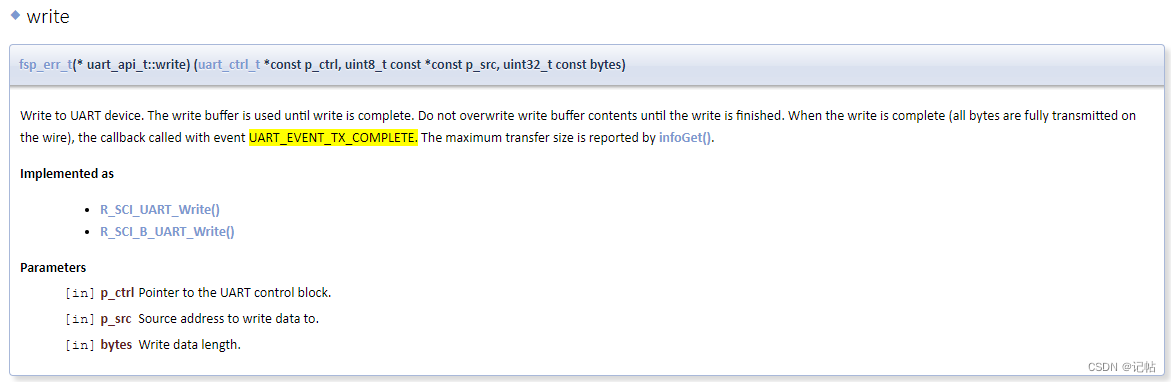
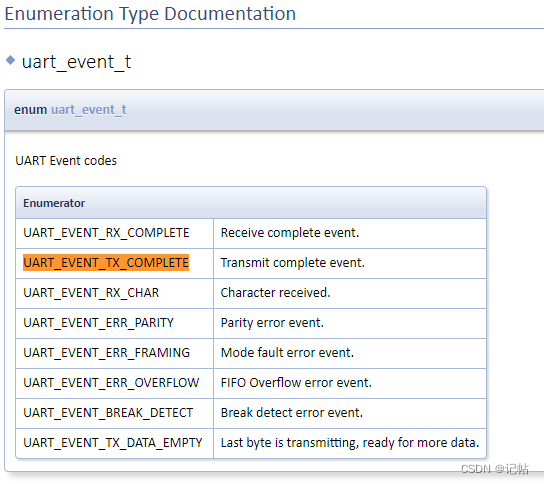
可以检查检查 “p_args” 结构体中的 “event” 字段的值是否等于 “UART_EVENT_TX_COMPLETE”。如果条件为真,那么 if 语句后面的代码块将会执行。
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include <stdio.h>
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
IIC属性配置
查看手册,可以得知LIS2DW12的IIC地址为“0011000” 或者 “0011001”,即0x18或0x19。
初始换管脚
由于需要向LIS2DW12_I2C_ADD_L写入以及为IIC模式。
所以使能CS为高电平,配置为IIC模式。

配置SA0为低电平。
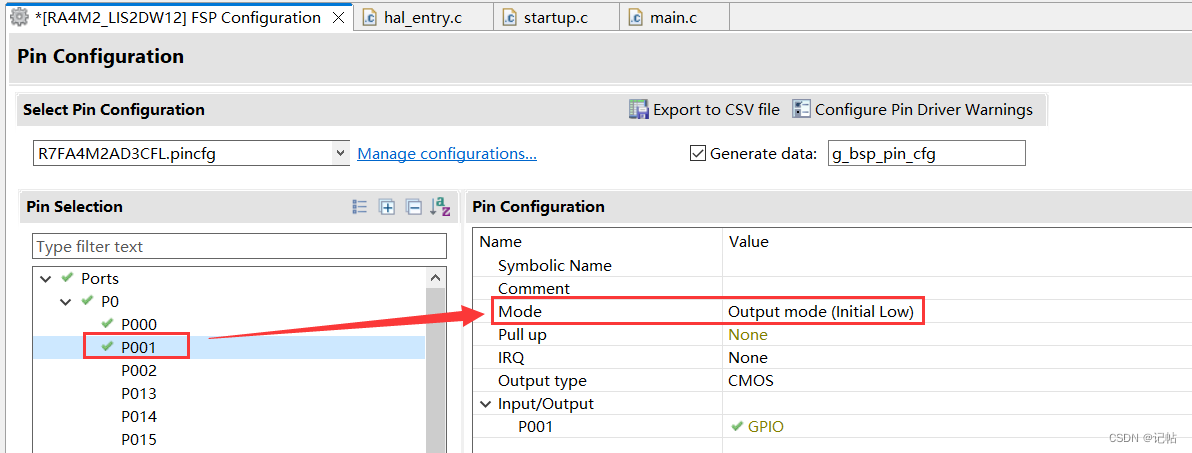
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_00, BSP_IO_LEVEL_HIGH);
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_01, BSP_IO_LEVEL_LOW);
IIC配置
配置RA4M2的I2C接口,使其作为I2C master进行通信。
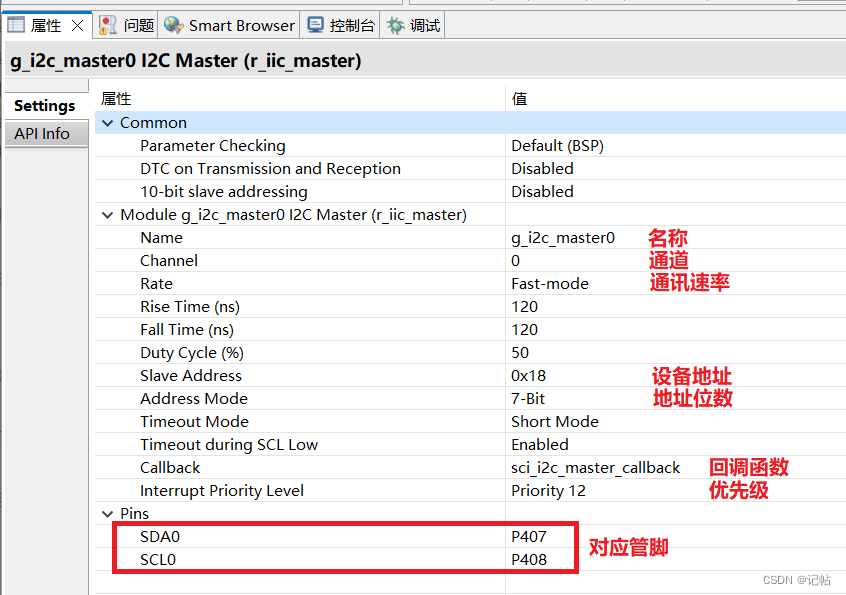
查看开发板原理图,对应的IIC为P407和P408。
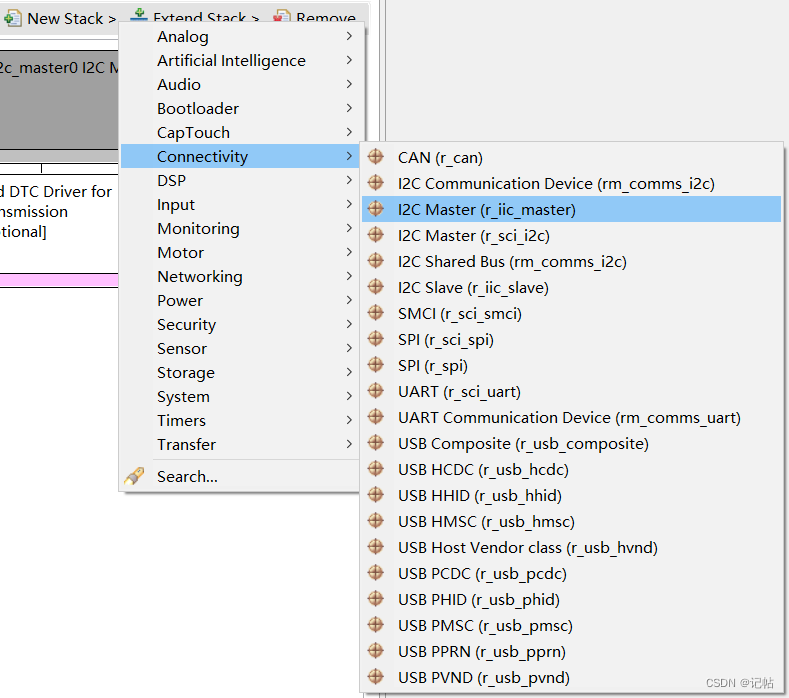
点击Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
设置IIC的配置,需要注意从机的地址。
R_IIC_MASTER_Open()函数原型
R_IIC_MASTER_Open()函数为执行IIC初始化,开启配置如下所示。
/* Initialize the I2C module */
err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函数原型
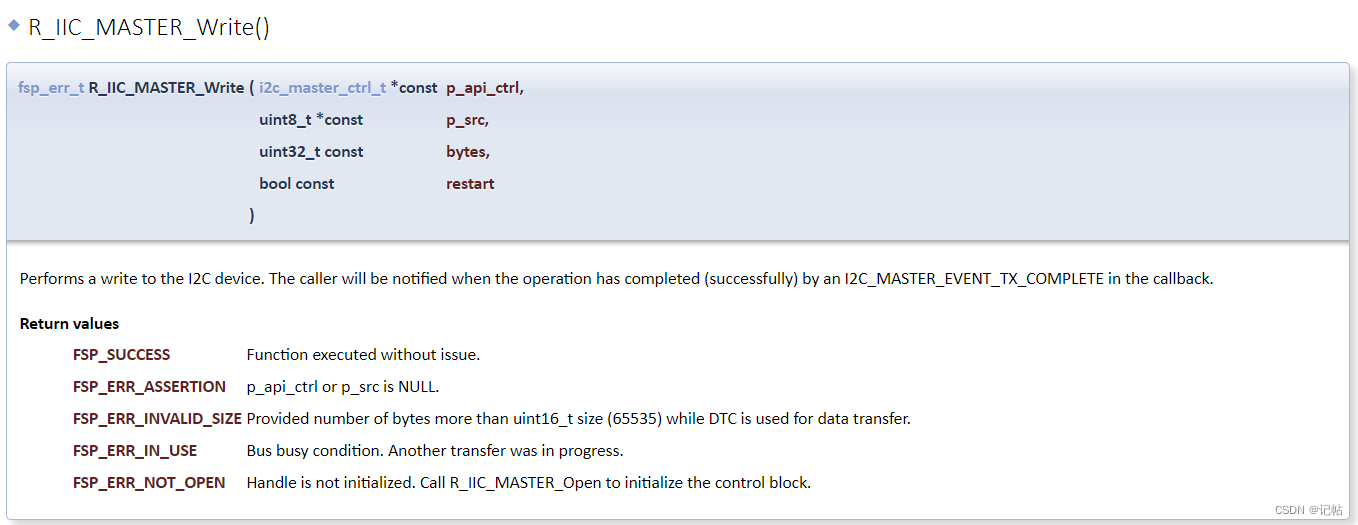
R_IIC_MASTER_Write()函数是向IIC设备中写入数据,写入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ®, 1, true);
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函数原型
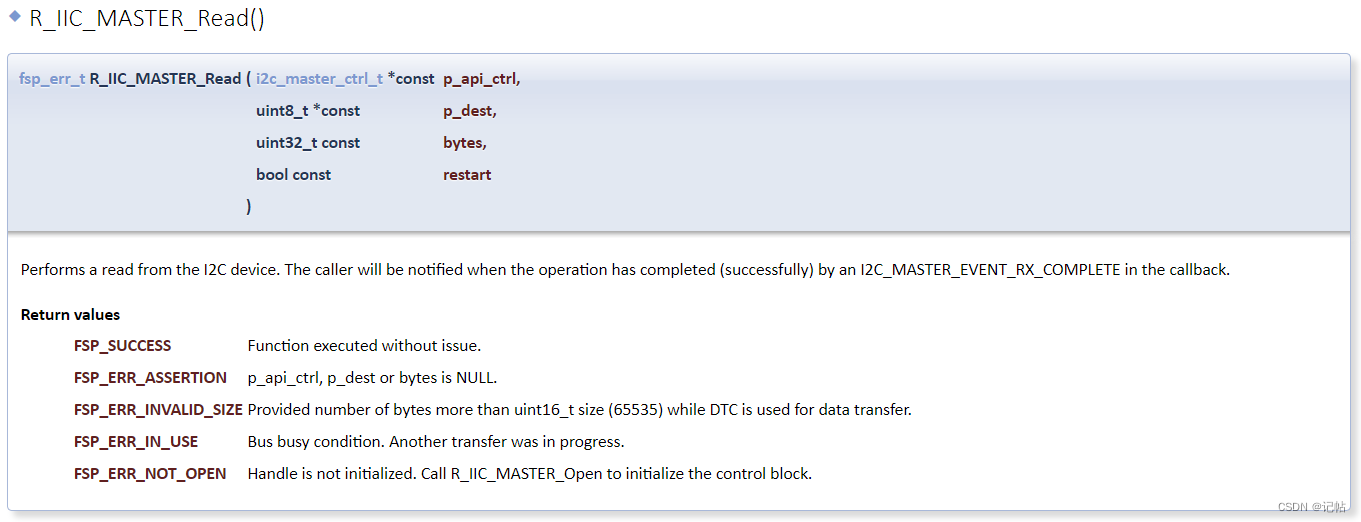
R_SCI_I2C_Read()函数是向IIC设备中读取数据,读取格式如下所示。
/* Read data from I2C slave */
err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false);
assert(FSP_SUCCESS == err);
sci_i2c_master_callback()回调函数
对于数据是否发送完毕,可以查看是否获取到I2C_MASTER_EVENT_TX_COMPLETE字段。
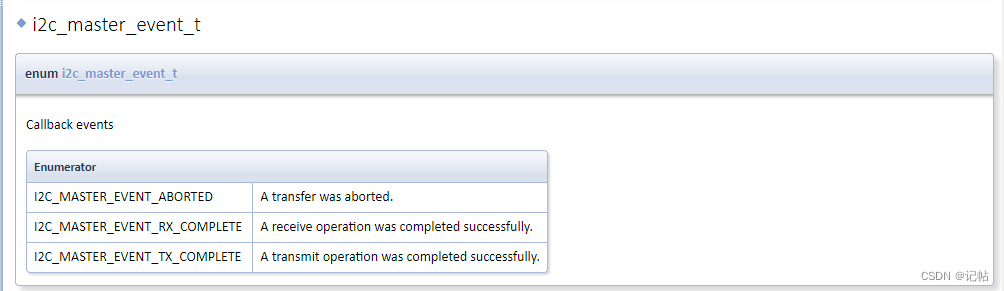
/* Callback function */
i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED;
uint32_t timeout_ms = 100000;
void sci_i2c_master_callback(i2c_master_callback_args_t *p_args)
{
i2c_event = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event = p_args->event;
}
}
参考程序
https://github.com/STMicroelectronics/lis2dw12-pid
初始换管脚
由于需要向LIS2DW12_I2C_ADD_H写入以及为IIC模式。
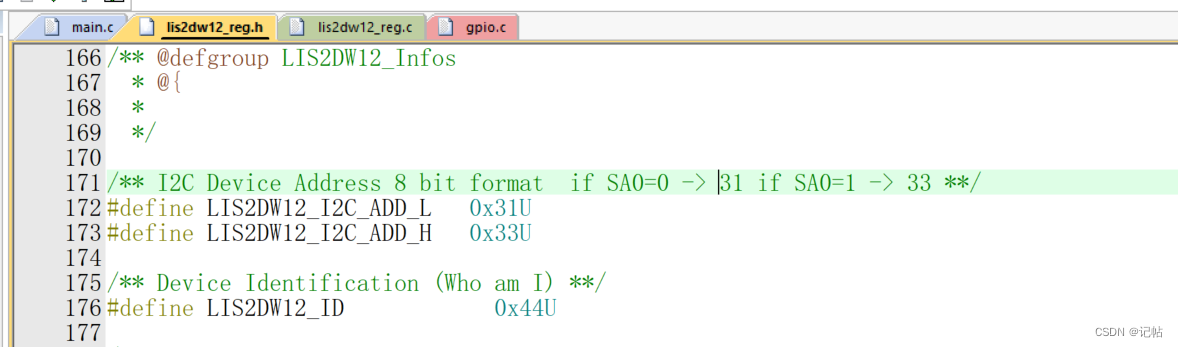
所以使能CS为高电平,配置为IIC模式。
配置SA0为高电平。
HAL_GPIO_WritePin(GPIOC, CS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, SA0_Pin, GPIO_PIN_SET);
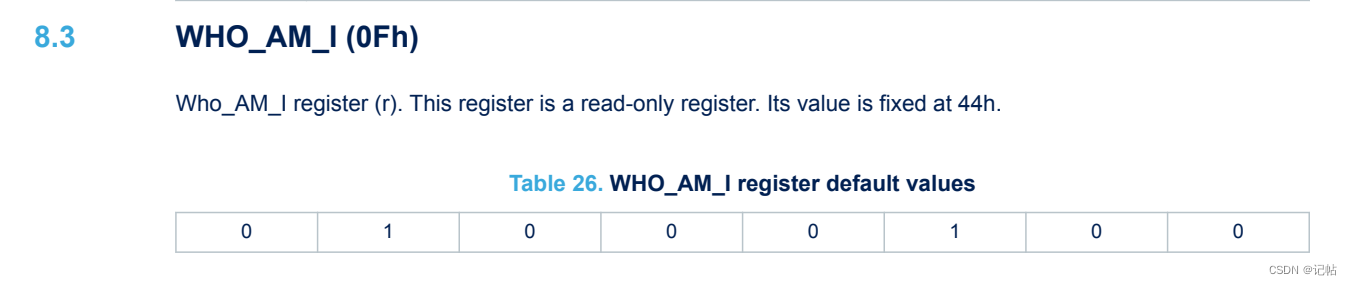
获取ID
我们可以向WHO_AM_I (0Fh)获取固定值,判断是否为0x44。
lis2dw12_device_id_get为获取函数。
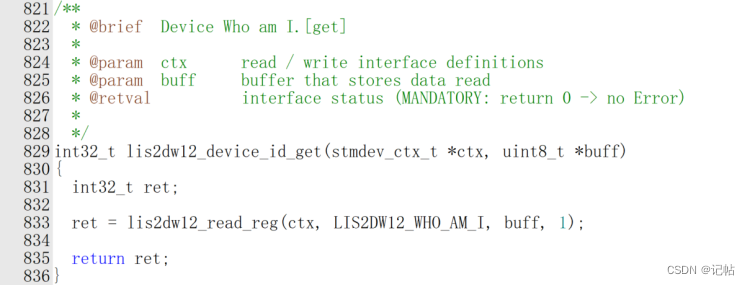
对应的获取ID驱动程序,如下所示。
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2dw12_device_id_get(&dev_ctx, &whoamI);
printf("LIS2DW12_ID=0x%x,whoamI=0x%x",LIS2DW12_ID,whoamI);
if (whoamI != LIS2DW12_ID)
while (1) {
/* manage here device not found */
}
复位操作
可以向CTRL2 (21h)的SOFT_RESET寄存器写入1进行复位。
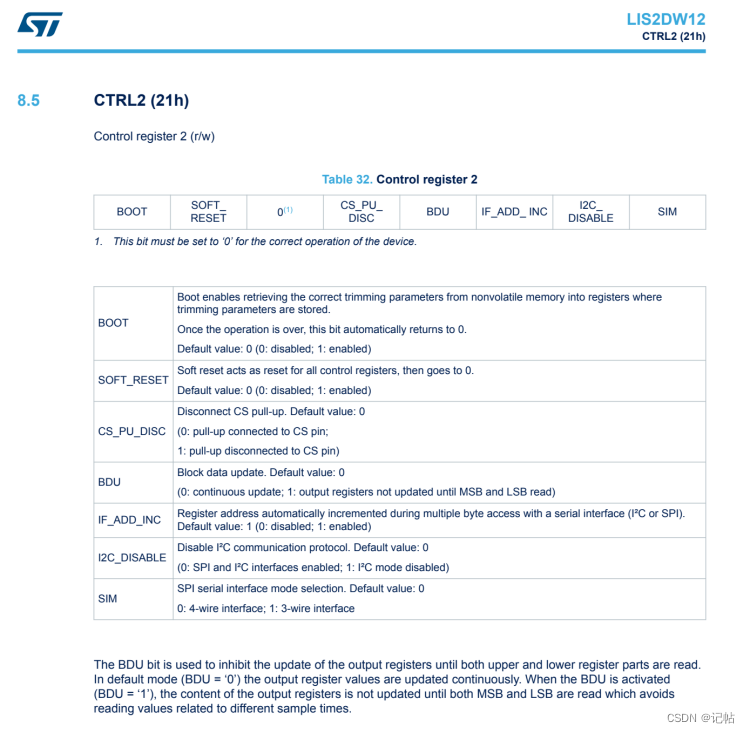
lis2dw12_reset_set为重置函数。
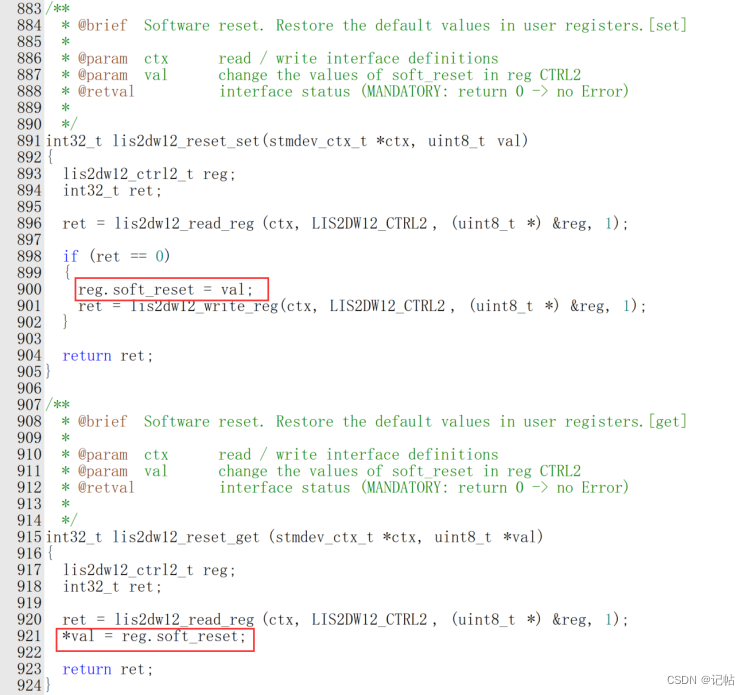
对应的驱动程序,如下所示。
/* Restore default configuration */
lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lis2dw12_reset_get(&dev_ctx, &rst);
} while (rst);
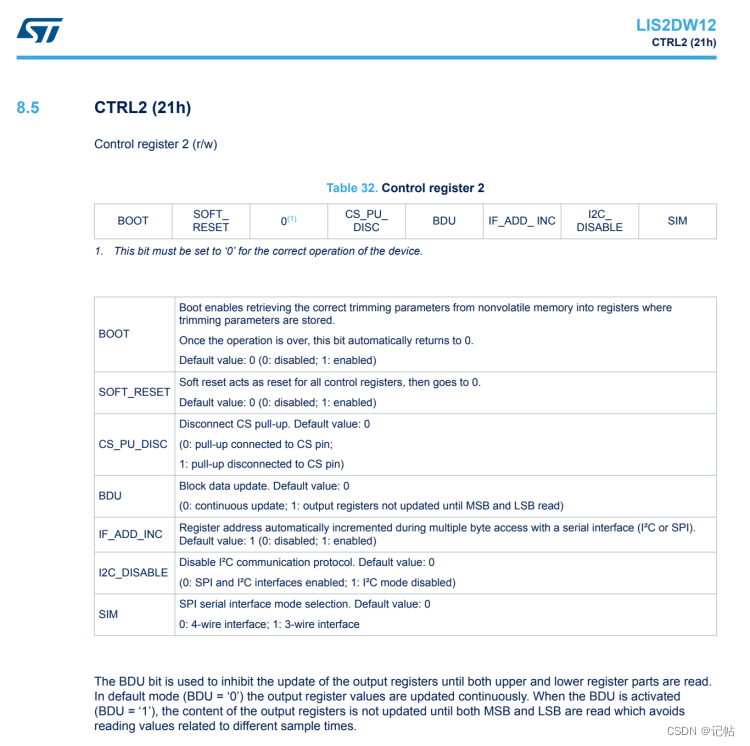
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。
连续更新模式(BDU = ‘0’):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。
块数据更新(BDU)模式(BDU = ‘1’):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。
简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。
可以向CTRL2 (21h)的BDU寄存器写入1进行开启。
对应的驱动程序,如下所示。
/* Enable Block Data Update */
lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
设置传感器的量程
FS[1:0] - 全量程选择:这两个位用于设置传感器的量程。量程决定了传感器可以测量的最大加速度值。例如,量程可以设置为±2g、±4g、±8g或±16g。这允许用户根据应用的特定需求调整传感器的灵敏度。
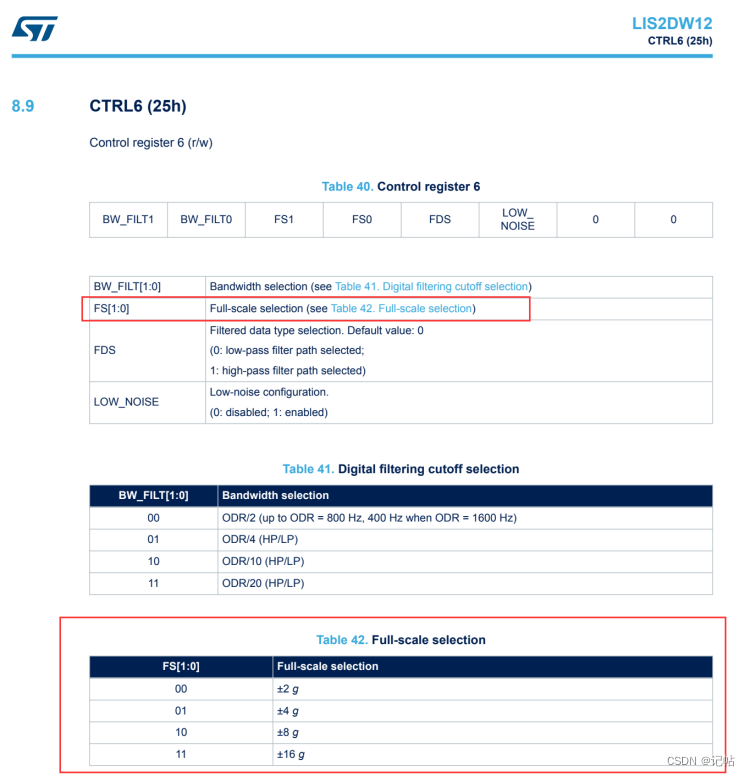
对应的驱动程序,如下所示。
/* Set full scale */
lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
配置过滤器链
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);:设置加速度计输出的过滤器路径。这里选择了输出上的低通滤波器(LPF),用于去除高频噪声。
lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4);:设置过滤器的带宽。这里的设置是将输出数据率(ODR)除以4,进一步决定了滤波器的截止频率。
配置电源模式
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE);:这个调用设置加速度计的电源模式为高性能模式。这通常意味着更高的功耗,但提供更精确的测量。
设置输出数据速率
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);:设置加速度计的输出数据速率为每秒25次。输出数据速率决定了传感器多久采集一次数据,并影响数据的实时性和功耗。
/* Enable Block Data Update */
lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set full scale */
lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
/* Configure filtering chain
* Accelerometer - filter path / bandwidth
*/
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);
lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4);
/* Configure power mode */
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE);
/* Set Output Data Rate */
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);
轮询获取加速度
检查新数据是否可用:
lis2dw12_flag_data_ready_get(&dev_ctx, ®);:这个函数调用检查加速度计是否有新的数据可读。如果有新数据,reg 变量将被设置为非零值。
主要为读取STATUS (27h)的DRDY位。
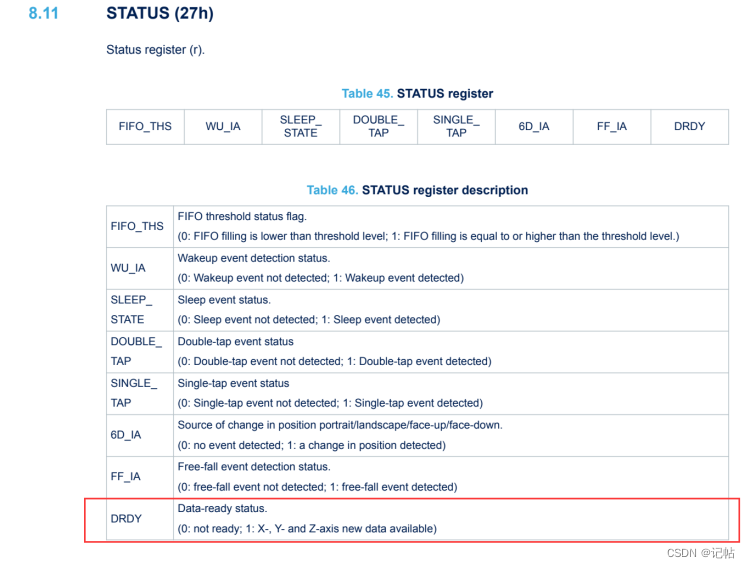
如果 reg 是非零的,说明有新的加速度数据可读。
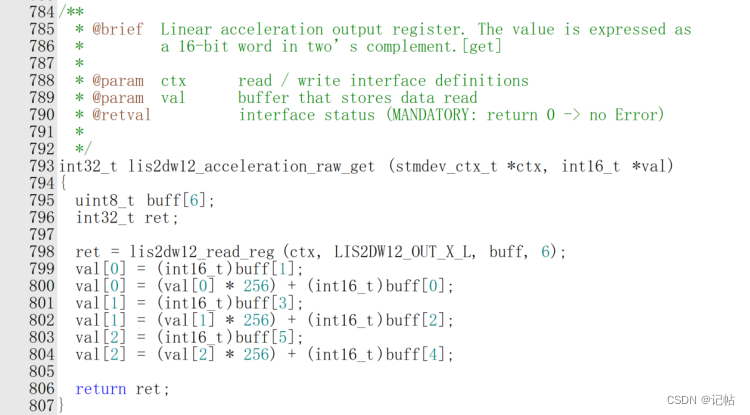
lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);:这个函数调用实际读取加速度计的原始数据,并存储在 data_raw_acceleration 数组中。
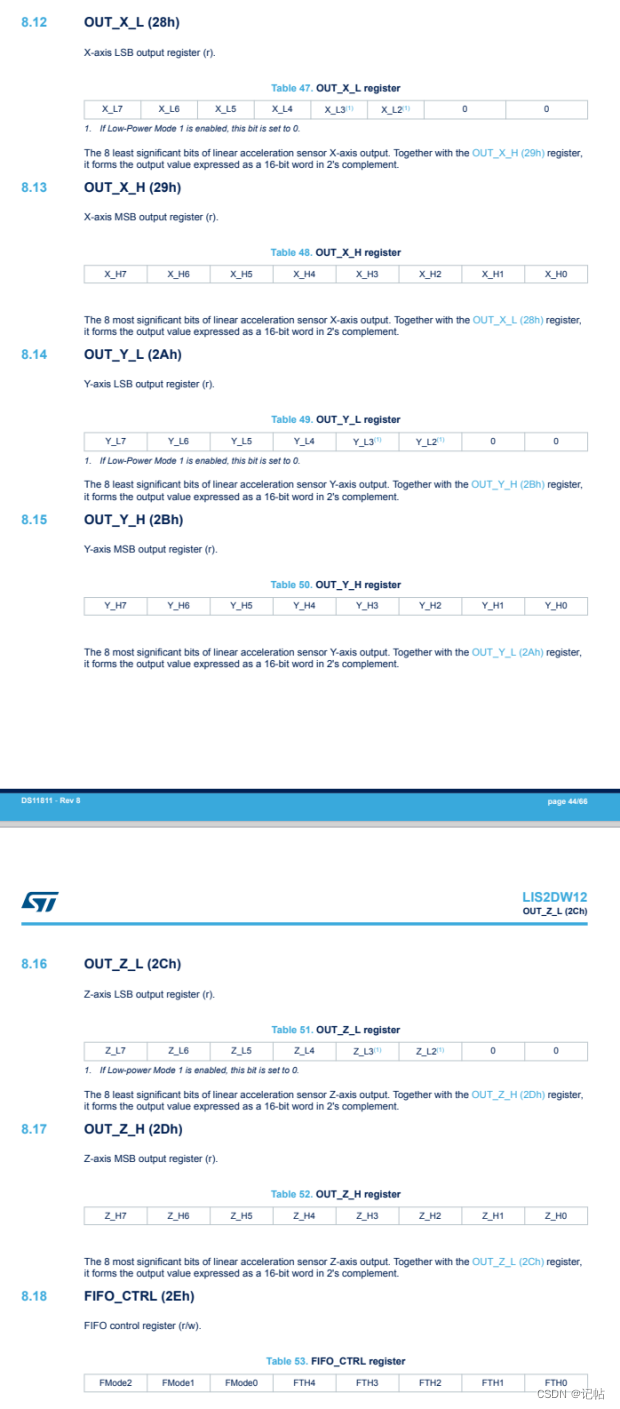
数据在28h-2Dh中。
加速度数据首先以原始格式(通常是整数)读取,然后需要转换为更有意义的单位,如毫重力(mg)。这里的转换函数 lis2dw12_from_fs2_to_mg() 根据加速度计的量程(这里假设为±2g)将原始数据转换为毫重力单位。
acceleration_mg[0] = lis2dw12_from_fs2_to_mg(data_raw_acceleration[0]); 等三行代码分别转换 X、Y、Z 轴的加速度数据。

● LIS2DW12 加速度计通常会有一个固定的位分辨率,比如 16 位(即输出值是一个 16 位的整数)。这意味着加速度计可以输出的不同值的总数是 2^16=65536。这些值均匀地分布在 -2g 到 +2g 的范围内。
● 因此,这个范围(4g 或者 4000 mg)被分成了 65536 个步长。
● 每个步长的大小是 4000 mg/65536≈0.061 mg/LSB
所以,函数中的乘法 ((float_t)lsb) * 0.061f 是将原始的整数值转换为以毫重力(mg)为单位的加速度值。这个转换对于将加速度计的原始读数转换为实际的物理测量值是必需的。
while (1)
{
uint8_t reg;
/* Read output only if new value is available */
lis2dw12_flag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read acceleration data */
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);
//acceleration_mg[0] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[0]);
//acceleration_mg[1] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[1]);
//acceleration_mg[2] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[2]);
acceleration_mg[0] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[0]);
acceleration_mg[1] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[1]);
acceleration_mg[2] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[2]);
printf("Acceleration [mg]:X=%4.2f\tY=%4.2f\tZ=%4.2f\r\n",acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
}
R_BSP_SoftwareDelay(100, BSP_DELAY_UNITS_MILLISECONDS);
}
计算倾角
while (1)
{
uint8_t reg;
/* Read output only if new value is available */
lis2dw12_flag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read acceleration data */
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);
//acceleration_mg[0] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[0]);
//acceleration_mg[1] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[1]);
//acceleration_mg[2] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[2]);
acceleration_mg[0] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[0]);
acceleration_mg[1] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[1]);
acceleration_mg[2] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[2]);
printf("Acceleration [mg]:X=%4.2f\tY=%4.2f\tZ=%4.2f\r\n",acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
float g = 1000;
// 计算X轴的倾角
float x_angle = atan(acceleration_mg[0] / sqrt(acceleration_mg[1] * acceleration_mg[1] + acceleration_mg[2] * acceleration_mg[2]));
// 计算Y轴的倾角
float y_angle = atan(acceleration_mg[1] / sqrt(acceleration_mg[0] * acceleration_mg[0] + acceleration_mg[2] * acceleration_mg[2]));
// 计算Z轴的倾角
float z_angle = atan(acceleration_mg[2] / sqrt(acceleration_mg[0] * acceleration_mg[0] + acceleration_mg[1] * acceleration_mg[1]));
// 将弧度转换为度数
x_angle = x_angle * 180.0 / 3.14159265;
y_angle = y_angle * 180.0 / 3.14159265;
z_angle = z_angle * 180.0 / 3.14159265;
// 打印结果
printf("X: %.2f °\n", x_angle);
printf("Y: %.2f °\n", y_angle);
printf("Z: %.2f °\n", z_angle);
}
R_BSP_SoftwareDelay(100, BSP_DELAY_UNITS_MILLISECONDS);
}
演示
在平放时候数据如下所示。

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 启动Vue项目,报错:‘vue-cli-service‘ 不是内部或外部命令,也不是可运行的程序
- vscode如何设置doxygen并生成文档
- HTML常用的特殊字符大全(供复制使用)
- JAVA 内部类
- 【2024】Windows11傻瓜配置深度学习环境(Anaconda+Pytorch(GPU版本))
- linux下如何完成RPM打包?
- 【开源】基于JAVA语言的智慧家政系统
- 基于springboot的疫情物资捐赠和分配系统
- 事务相关
- 内联函数VS普通函数