【图的应用一:最小生成树】- 用 C 语言实现普里姆算法和克鲁斯卡尔算法
目录
一、最小生成树?
假设要在 n 个城市之间建立通信联络网,则连通 n 个城市只需要 n - 1 条线路。这时,自然会考虑这样一个问题,如何在最节省经费的前提下建立这个通信网。
在每两个城市之间都可设置一条线路,相应地都要付出一定的经济代价。n 个城市之间,最多可能设置 ? ?条线路,那么如何在这些可能的线路中选择 n - 1 条,以使总的耗费最少呢?
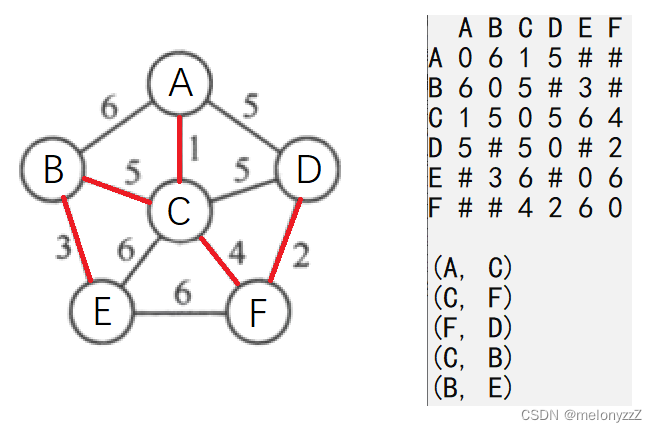
可以用连通网来表示 n 个城市,以及 n 个城市间可能设置的通信路线,其中网的顶点表示城市,边表示两城市之间的线路,赋予边的权值表示相应的代价。对于 n 个顶点的连通网可以建立许多不同的生成树,每一颗生成树都可以是一个通信网,最合理的通信网应该是各边代价之和最小的那颗生成树,称为连通网的最小代价生成树(Minimum Cost Spanning Tree),简称最小生成树。
构造最小生成树有多种算法,其中多数算法利用了最小生成树的下列一种简称为 MST 的性质:
假设 N = (V, E) 是一个连通网,U 是顶点集 V 的一个非空真子集。若 (u, v) 是 N 中所有的一个顶点在 U(?)中,另一个顶点在 V - U(?
)中的边里,具有最小权值的一条边,则必存在一棵包含边 (u, v) 的最小生成树。
可以用反证法来证明:
假设网 N 的任何一棵最小生成树都不包含边 (u, v),T 是连通网上的一棵最小生成树,由生成树的定义可知,T 中必存在一条从 u 到 v 的路径 P,且在 P 上必存在一条边 (u', v'),其中 ?。
当将边 (u, v) 加入到 T 中时,(u, v) 和 P 构成了一条回路,删去 (u', v') 便可消除回路,同时得到另一颗生成树 T‘。因为 (u, v) 的权值不高于 (u', v'),所以 T' 的权值亦不高于 T,那么 T’ 是包含 (u, v) 的一棵最小生成树,和假设矛盾。
普里姆(Prim)算法和克鲁斯卡尔(Kruskal)算法是两个利用 MST 性质构造最小生成树的算法。
二、普里姆算法的构造过程
假设 N = (V, E) 是连通网,TE 是 N 上最小生成树中边的集合。
-
?。
-
在所有 ?
?的边?
?中找一条权值最小的边?
?并入集合 TE,同时 ?
?并入 U。
-
重复 2,直至 U = V 为止。
此时 TE 中必有 n - 1 条边,则 T = (V, TE) 为 N 的最小生成树。
下图所示为一个连通网 G5 从 v1 开始构造最小生成树的例子。可以看出,普里姆算法逐步增加 U 中的顶点,可称为 "加点法"。

每次选择最小边时,可能存在多条同样权值的边可选,此时任选其一即可。
三、普里姆算法的实现
假设无向网 N 以邻接矩阵形式存储,从顶点 u 出发构造 N 的最小生成树 T,要求输出 T 的各条边。
为实现这个算法附设了两个辅助数组 lowcostArr 和 adjVexPosArr。对每个顶点 ,lowcostArr[i - 1] = Min{ cost? },即表示 N 中所有的一个顶点在 U 中,另一个顶点是 vi 的边里,最小边上的权值;adjVexPosArr[i - 1] 则表示那条最小边在 U 中的那个顶点在图中的位置。
AMGraph.h:
#pragma once
?
// 无向网
typedef char VertexType;
typedef int EdgeType;
?
#define DEFAULT_CAPACITY 2
?
typedef struct AMGraph
{
VertexType* vertices;
EdgeType** edges;
int vSize;
int eSize;
int capacity;
}AMGraph;
?
// 基本操作
void AMGraphInit(AMGraph* pg);
?
void ShowAdjMatrix(AMGraph* pg);
?
int GetVertexPos(AMGraph* pg, VertexType v);
?
void InsertVertex(AMGraph* pg, VertexType v);
void InsertEdge(AMGraph* pg, VertexType v1, VertexType v2, EdgeType cost);
?
// 普里姆算法
void MiniSpanTree_Prim(AMGraph* pg, VertexType u);AMGraph.c:
#include "AMGraph.h"
#include <assert.h>
#include <stdlib.h>
#include <stdio.h>
?
void AMGraphInit(AMGraph* pg)
{
assert(pg);
pg->vSize = pg->eSize = 0;
pg->capacity = DEFAULT_CAPACITY;
pg->vertices = (VertexType*)malloc(sizeof(VertexType) * pg->capacity);
assert(pg->vertices);
?
pg->edges = (EdgeType**)malloc(sizeof(EdgeType*) * pg->capacity);
assert(pg->edges);
for (int i = 0; i < pg->capacity; ++i)
{
pg->edges[i] = (EdgeType*)malloc(sizeof(EdgeType) * pg->capacity);
assert(pg->edges[i]);
for (int j = 0; j < pg->capacity; ++j)
{
if (i == j)
?pg->edges[i][j] = 0;
else
?pg->edges[i][j] = INT_MAX;
}
}
}
?
void ShowAdjMatrix(AMGraph* pg)
{
assert(pg);
printf(" ");
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
}
printf("\n");
?
for (int i = 0; i < pg->vSize; ++i)
{
printf("%c ", pg->vertices[i]);
for (int j = 0; j < pg->vSize; ++j)
{
if (pg->edges[i][j] == INT_MAX)
printf("# "); ?// 用 # 代替 ∞
else
printf("%d ", pg->edges[i][j]);
}
printf("\n");
}
}
?
int GetVertexPos(AMGraph* pg, VertexType v)
{
assert(pg);
for (int i = 0; i < pg->vSize; ++i)
{
if (pg->vertices[i] == v)
return i;
}
return -1;
}
?
void InsertVertex(AMGraph* pg, VertexType v)
{
assert(pg);
// 考虑是否需要扩容
if (pg->vSize == pg->capacity)
{
VertexType* tmp1 = (VertexType*)realloc(pg->vertices, sizeof(VertexType) * 2 * pg->capacity);
assert(tmp1);
pg->vertices = tmp1;
?
EdgeType** tmp2 = (EdgeType**)realloc(pg->edges, sizeof(EdgeType*) * 2 * pg->capacity);
assert(tmp2);
pg->edges = tmp2;
for (int i = 0; i < pg->capacity; ++i)
{
EdgeType* tmp3 = (EdgeType*)realloc(pg->edges[i], sizeof(EdgeType) * 2 * pg->capacity);
assert(tmp3);
pg->edges[i] = tmp3;
for (int j = pg->capacity; j < 2 * pg->capacity; ++j)
{
pg->edges[i][j] = INT_MAX; ?
}
}
for (int i = pg->capacity; i < 2 * pg->capacity; ++i)
{
pg->edges[i] = (EdgeType*)malloc(sizeof(EdgeType) * 2 * pg->capacity);
assert(pg->edges[i]);
for (int j = 0; j < 2 * pg->capacity; ++j)
{
if (i == j)
pg->edges[i][j] = 0;
else
pg->edges[i][j] = INT_MAX;
}
}
?
pg->capacity *= 2;
}
// 插入顶点
pg->vertices[pg->vSize++] = v;
}
?
void InsertEdge(AMGraph* pg, VertexType v1, VertexType v2, EdgeType cost)
{
assert(pg);
int pos1 = GetVertexPos(pg, v1);
int pos2 = GetVertexPos(pg, v2);
if (pos1 == -1 || pos2 == -1)
return;
?
if (pg->edges[pos1][pos2] != INT_MAX)
return;
?
pg->edges[pos1][pos2] = pg->edges[pos2][pos1] = cost;
++pg->eSize;
}
?
// 普里姆算法的实现
void MiniSpanTree_Prim(AMGraph* pg, VertexType u)
{
assert(pg);
EdgeType* lowcostArr = (EdgeType*)malloc(sizeof(EdgeType) * pg->vSize);
int* adjVexPosArr = (int*)malloc(sizeof(int) * pg->vSize);
assert(lowcostArr && adjVexPosArr);
?
int pos = GetVertexPos(pg, u);
if (pos == -1)
return;
for (int i = 0; i < pg->vSize; ++i)
{
if (i != pos)
{
lowcostArr[i] = pg->edges[pos][i];
adjVexPosArr[i] = pos;
}
else
{
lowcostArr[i] = 0; ?// 初始,U = {u}
}
}
? ?// 选择其余 pg->vSize - 1 个顶点,生成 pg->vSize - 1 条边
for (int i = 0; i < pg->vSize - 1; ++i)
{
EdgeType min = INT_MAX;
int minIndex = -1;
for (int j = 0; j < pg->vSize; ++j)
{
if (lowcostArr[j] != 0 && lowcostArr[j] < min)
{
min = lowcostArr[j];
minIndex = j;
}
}
printf("(%c, %c)\n", pg->vertices[adjVexPosArr[minIndex]], pg->vertices[minIndex]);
lowcostArr[minIndex] = 0; ?// 将顶点并入 U
?
for (int j = 0; j < pg->vSize; ++j)
{
if (pg->edges[minIndex][j] < lowcostArr[j])
{
lowcostArr[j] = pg->edges[minIndex][j];
adjVexPosArr[j] = minIndex;
}
}
}
? ?
? ?free(lowcostArr);
free(adjVexPosArr);
}Test.c:
#include "AMGraph.h"
#include <stdio.h>
?
int main()
{
AMGraph g;
AMGraphInit(&g);
InsertVertex(&g, 'A');
InsertVertex(&g, 'B');
InsertVertex(&g, 'C');
InsertVertex(&g, 'D');
InsertVertex(&g, 'E');
InsertVertex(&g, 'F');
InsertEdge(&g, 'A', 'B', 6);
InsertEdge(&g, 'A', 'C', 1);
InsertEdge(&g, 'A', 'D', 5);
InsertEdge(&g, 'B', 'C', 5);
InsertEdge(&g, 'B', 'E', 3);
InsertEdge(&g, 'C', 'D', 5);
InsertEdge(&g, 'C', 'E', 6);
InsertEdge(&g, 'C', 'F', 4);
InsertEdge(&g, 'D', 'F', 2);
InsertEdge(&g, 'E', 'F', 6);
ShowAdjMatrix(&g);
printf("\n");
?
MiniSpanTree_Prim(&g, 'A');
return 0;
}
四、克鲁斯卡尔算法的构造过程
假设连通网 N = (V, E)。
-
令最小生成树的初始状态为只有 n 个顶点而无边的非连通图 T = (V, {}),图中每个顶点自成一个连通分量。
-
在 E 中选择权值(代价)最小的边,若该边依附的顶点落在不同的连通分量上(即不形成回路),则将此边加入到 T 中,否则舍去此边而选择下一条权值最小的边。
-
重复 2,直至 T 中所有顶点都在一个连通分量上为止。
例如,下图所示为依照克鲁斯卡尔算法对连通网 G5 构造一棵最小生成树的过程。权值 1、2、3、4 的 4 条边由于满足上述条件,则先后被加入到 T 中;权值为 5 的两条边 (v1, v4) 和 (v3, v4) 被舍去,因为它们依附的两顶点在同一连通分量上,它们若加入 T 中,则会使 T 中产生回路,而下一条权值(= 5)最小的边 (v2, v3) 联结两个连通分量,则可加入 T。由此,构造出了一棵最小生成树。

可以看出,克鲁斯卡尔算法逐步增加生成树的边,与普里姆算法相比,可称为 "加边法"。与普里姆算法一样,每次选择最小边时,可能有多条同样权值的边可选,可以任选其一。
五、克鲁斯卡尔算法的实现
假设无向网 G 以邻接矩阵形式存储,构造 G 的最小生成树,输出 T 的各条边。
typedef struct Edge
{
int x; ?// 边的起点在图中的位置
int y; ?// 边的终点在图中的位置
EdgeType cost; ?// 边上的权值(即代价)
}Edge;
?
int CmpByCost(const void* e1, const void* e2)
{
return (*(Edge*)e1).cost - (*(Edge*)e2).cost;
}
?
void MiniSpanTree_Kruskal(AMGraph* pg)
{
assert(pg);
Edge* edges = (Edge*)malloc(sizeof(Edge) * pg->eSize);
assert(edges);
int k = 0;
for (int i = 0; i < pg->vSize; ++i)
{
for (int j = i + 1; j < pg->vSize; ++j)
{
if (pg->edges[i][j] != INT_MAX)
{
edges[k].x = i;
edges[k].y = j;
edges[k].cost = pg->edges[i][j];
++k;
}
}
}
qsort(edges, pg->eSize, sizeof(Edge), CmpByCost);
?
int* vexSet = (int*)malloc(sizeof(int) * pg->vSize); ?// 标识各顶点所属的连通连通分量
assert(vexSet);
for (int i = 0; i < pg->vSize; ++i)
{
vexSet[i] = i;
}
?
for (int i = 0; i < pg->eSize; ++i)
{
int x = edges[i].x;
int y = edges[i].y;
int vs1 = vexSet[x];
int vs2 = vexSet[y];
if (vs1 != vs2)
{
printf("(%c, %c)\n", pg->vertices[x], pg->vertices[y]);
for (int j = 0; j < pg->vSize; ++j)
{
if (vexSet[j] == vs2) ?
vexSet[j] = vs1;
}
}
}
?
free(edges);
free(vexSet);
}本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 计算机网络-标准化工作及相关组织与性能指标(标准分类 标准化工作 RFC 速率 带宽 吞吐量 时延 时延带宽积 RTT 利用率)
- 使用使用maven后jstl标签库无法使用
- 【PyTorch】PyTorch之Tensors索引切片篇
- 基于深度学习的玉米果穗筛分虚拟仿真系统开发
- Enhance PDF Document Reviews Crack
- 说说微信小程序的登录流程?
- C语言实验3:函数的定义
- 【DEBUG】AttributeError: module ‘numpy‘ has no attribute ‘object‘
- 四、MySQL之增删改
- python实现图像的二维傅里叶变换——冈萨雷斯数字图像处理