论文解读--Wheel extraction based on micro doppler distribution using high-resolution radar
基于高分辨率雷达微多普勒分布的车轮提取
摘要
?????? 随着先进驾驶辅助系统(ADAS)在城市场景中的出现,对汽车、卡车或摩托车等轮式车辆进行快速可靠的分类和运动估计至关重要。车轮的速度不同于车辆的底盘速度的事实被利用。第一次,基于多普勒分布的全自动方法提取了车轮的确切位置。计算归一化多普勒矩,描述基于车轮多普勒分布的每个反射的多普勒特征。具有高值的位置显示轮子的位置。除了分类之外,还可以估计车辆的方向,从而估计行驶方向。此外,还估计了后轴的位置,这对于可靠地预测旋转运动和估计偏航率至关重要。在77 GHz汽车雷达传感器上的实验结果验证了该方法的可行性。
1 介绍
????????当使用高分辨率DBF(数字波束形成)雷达时,从扩展物体接收到多个反射。目前还没有一种通用的雷达响应模型来描述具有未知角度的不明物体接收反射的数量和位置。为了检测并对关键情况做出反应,精确捕获其他交通参与者是很重要的。通过分析它们的速度分布(多普勒速度/方位角)来解析它们的运动状态[1]。被检测车轮的位置可用于分类,并作为空间位置、延伸和方向的表示。
????????如果两个车轮在一个共同的侧面或共同的轴上被捕获,方向估计是可能的。通过检测车轮识别后轴,假设没有横向漂移,确定车辆的旋转中心。旋转中心是车辆上速度矢量平行于物体方向的点。这对于正确预测转弯机动过程中物体的姿态至关重要[2]。车辆长度和比例长度/后轴通常使用不准确的假设。
????????该方法基于微多普勒效应,当被辐射物体的部分存在振动或相对运动时,就会产生微多普勒效应。在多普勒频谱中会产生额外的模式,这些模式在体运动的多普勒频率周围作为边带出现[3]。
2 相关工作
????????多普勒特征分析主要用于逆合成孔径雷达(ISAR)[4] -[7]或合成孔径雷达(SAR)[8]中的分类任务。
????????利用2D-ISAR,结合高距离分辨率对车轮随时间的微多普勒特征进行了分析[4]。没有提出自动提取,但在单个序列上仅手工分析了多普勒速度分布。
?????? 模拟不同的旋转物体(如车轮),用1D-ISAR在联合时频域分析其多普勒特征[5]。行人、轮式车辆和履带式坦克使用微多普勒特征与先前提取的模式的相关性进行分类[6]。该方法利用动态时间规整来分析多普勒信号与角度的关系,但不是实时运行。经验模态分解主要通过履带式车辆较大的微多普勒传播来对履带式车辆和轮式车辆进行分类,同时假设轮式车辆仅具有来自整体运动的分量[7]。
?????? 据作者所知,这是第一个不仅检测,而且还执行车辆二维车轮位置的自动提取的工作。对于驾驶辅助领域的应用,该方法必须处理移动传感器和未知目标车辆的运动,因此无法应用SAR和ISAR。采用车载DBF雷达,在一个测量周期内进行距离和横向距离方向的提取。可以实时检测多个车轮,并精确估计其位置。
3 理论
????????多普勒雷达只能测量方位角(θ)处的径向速度(vD)。推导表明,与具有3自由度(DOF)的车辆的运动状态无关,多普勒速度总是形成具有2 DOF(振幅和相移)的余弦除以θ-称为速度分布 [1]。
?????? 在物体运动和不同方位角引起的多普勒速度变化中,微多普勒是由车轮的偏离速度引起的。该方法必须处理不同的车轮类型(例如铝或钢轮辋)和尺寸,因此反射的详细建模非常具有挑战性。因此,提出了考虑最小和最大多普勒频移的简化模型。如图1所示,车轮上的速度分布从车轮和地面接触点的0变化到车轮顶部点在该位置(vi)的整体运动的2倍(假设没有车轮打滑)。因此,接收到的多普勒速度也从0到2viD变化。车轮的水平位置只引起方位角的一个可忽略不计的变化。
 图1 车辆底盘速度测量示例(左)和后轮速度推导示例(右)
图1 车辆底盘速度测量示例(左)和后轮速度推导示例(右)
4 信号处理
????????信号处理的概述如图2所示。例如,如图3所示为距离约为20米的车辆。基于(r,vD,θ)空间,使用有序统计恒虚警 (OS-CFAR)算法在(vD,θ)维度识别目标[9]。

图2 信号处理步骤概述

图3 车辆在20米距离内从0dB(红色)到60dB(蓝色),归一化到最大幅度的例子

????????图4 图3 (y轴)中底盘(1,3,4,6)和车轮(2,5,7)上的示例点的多普勒分布。标记整体运动的多普勒单元,计算归一化多普勒矩η。
?????? 在OS-CFAR步骤中,对于每个具有多普勒速度viD的提取目标,计算归一化多普勒运动η∈[0;1],描述其多普勒速度从0到2viD周围的多普勒分布。这是整体运动走廊外接收振幅的加权关系,由整体运动幅度归一化。走廊是必要的,因为由于传感器的有限分辨率,整体运动也会扩散。权重是根据整体运动的速度差来确定的。
????????图3点的多普勒分布如图4所示。可以看出,在整体运动之外的速度下,会产生来自车轮(2,5,7)的强烈反射。右前轮(7)被车辆的前部遮挡,因此只能在车辆地板下看到。由于车轮下部的速度仅低于整体运动,因此不会出现更高的多普勒速度。因此,η值小于直接可见车轮的η值,但仍显著高于车辆表面目标的η值。
????????所有目标通过DBSCAN(一种基于密度的聚类算法)分组为对象[10]。对于每个对象,计算区域,并且使用车辆可见部分大于2平方米的假设排除行人或杂物等较小的对象。
????????采用RANSAC算法[11],以速度分布为信号模型,识别属于车辆整体运动的主要目标群。排除了靠近目标的微多普勒和杂波。所述示例的速度分布如图5所示。RANSAC与正交距离回归(ODR)[12]相结合,不仅可以补偿vD的测量误差,还可以补偿θ的测量误差。详细描述请参考[1]。显然,多普勒速度在θ上有很大的扩展。例如,在13°范围内,多普勒速度变化为2.5 m/s。每个θi的整体运动是基于提取的速度分布估计的。方位角的考虑是必要的。否则,整体运动将被错误地识别为微多普勒。
?????? 对于所有属于整体运动的目标及其相应的η值,对所有超过定义阈值的目标执行第二次DBSCAN算法。在较小的搜索距离条件下(0.5 m),只对来自单个轮的目标进行聚类。对于每个簇,ηc计算为所有目标η的总和。第二个阈值删除具有较小ηc的集群。在最后一步,彼此接近的簇相对于ηc被合并。聚类中心计算为与车轮位置相对应的所有聚类点的加权平均值(η)。ηc保存为每个簇的多普勒分布值。
????????图6显示了所述示例的最终结果。检测到三个轮子,只有右后轮不可见。

????????图5 示例序列的车辆速度分布仅显示提取的整体运动目标。颜色表示每个目标的多普勒分布η(蓝色(0)-红色(0.2))和左后(RL),左前(FL)和右前(FR)车轮的估计位置,用蓝色圆圈(虚线)标记。
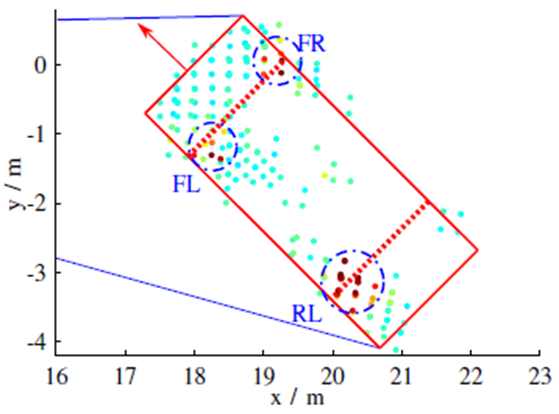
????????图6 示例序列的几何扩展,参考系统的车辆轮廓为实线,两个车轴为虚线。颜色表示每个目标的多普勒分布η(蓝色(0)-红色(0.2))和左后(RL),左前(FL)和右前(FR)车轮的估计位置,用蓝色圆圈(虚线)标记。
5 实验结果
????????采用chirp序列调制的77 GHz车载多普勒DBF雷达传感器(距离分辨率约为0.25m,多普勒分辨率为0.15 m/s)对该算法进行了验证。采用超分辨率技术,实现了约1°的方位角分辨率。
????????在评估场景中,目标车辆在自车前方10-30米的距离上以8字形和圆圈行驶,自车在两个前角配备了两个雷达传感器。所有的角度(雷达波束和车辆方向之间的角度)因此几乎被平等地覆盖。两辆车都配备了高精度参考系统(IMU与dGPS支持),因此所有车轮的精确参考位置是可用的。
????????在2134次测量中,检测到的车轮总数为3183个,这导致每次测量的平均检测率为1.5个车轮。平均绝对位置误差为0.23m, 50%的车轮检测位置误差小于0.12 m。在整个场景中,12%的测量中没有检测到车轮,35%的测量中检测到1个车轮,43%的测量中检测到2个车轮,9%的测量中检测到3个车轮,1%的测量中检测到4个车轮。
????????图7显示了车轮的倾斜角对雷达传感器的依赖关系。根据被测车轮的角度将测量结果按15°分成多个部分,每个部分测量60-100次,计算平均检测概率和位置误差。如果从传感器的位置直接可见,则车轮具有更高的检测概率。在+/- 45°范围内,总是在60%以上。当车轮接近正交时,检测率下降,误差明显增加。由于正交,径向速度很小,甚至为零。对于所有其他角度,平均位置误差几乎是恒定的。如果车轮在车辆的另一边,检测概率很低,在10 - 20%,如果它是正交的,它下降到几乎为零,因为可见的车轮阻挡了视野。
????????图8分别给出了每个车轮的检测概率。车辆的角度被按45°分成多个部分,每个部分有200-290个测量值。很明显,如果车轮是直接可见的,它有一个显着更高的检出率。如果车轮在车辆地板下,如果车辆后部可见,则后轮的效果更好,反之亦然,可以清楚地看到迎面而来的车辆。
????????根据上述应用评估了一些统计数据。在所有测量中,有52%的测量可以进行方向估计,因为在41%的测量中,检测到两个车轮在同一侧,在13%的测量中,检测到两个车轮在同一轴上。由于至少检测到后轴的一个车轮,因此在62%的测量中可以进行旋转中心的估计。
????????图9显示了所有检测到的车轮相对于目标车辆的位置。平均位置接近真实的车轮位置。在车辆的中心几乎没有检测存在。
????????由于该方法完全集成在现有的信号处理中,因此没有显著的执行时间。此外,只需要计算归一化多普勒矩(一种简单的加权和)和车轮聚类的第二次DBSCAN。聚类算法只考虑η值较大的目标,即在被检测场景中平均有25个目标。
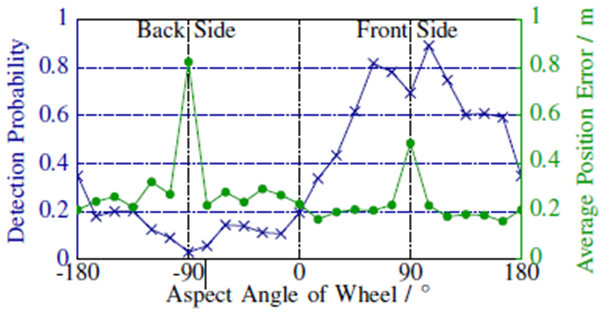
????????图7 所有车轮的平均检测概率(蓝色+)和位置误差(绿色?),取决于车轮对雷达传感器的方位角(移动方向)。0°:后视图,90°侧面可见,0/180°前视图,-90°侧面隐藏车辆。

????????图8 车轮的检测概率,取决于方位角(0°:后,90°:左侧,-90°:右侧,+/- 180°:前),右后(绿色Δ),左后(红色x),右前(黑色?)和左前(蓝色+)。
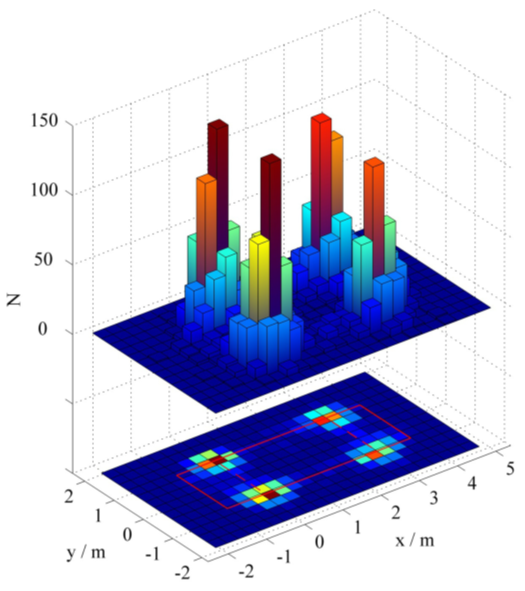
图9 在目标车辆坐标系(等高线,轴虚线)的完整序列上累积的车轮检测
6 结论
????????提出了一种利用全集成高分辨率多普勒雷达实时检测车轮的算法。实验结果表明,平均检测率约为1.5个车轮。除了分类任务,在超过50%或60%的测量中,分别获得了车辆的方向或后轴的位置(如果没有侧滑,则为转向中心)的信息。将这些信息整合到边界框或运动估计算法中是未来研究的任务。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 大模型学习产品,一个月顶一年 | 对话网易有道周枫
- Spring学习之——AOP(面向切面)
- S1-09 直达任务通知
- 【项目实战】功能覆盖率的收集1
- 认识缓存,一文读懂Cookie,Session缓存机制。
- opencv入门到精通——Canny边缘检测
- 《opencv实用探索·十九》光流法检测运动目标
- 【unity】屏幕事件
- SpringMVC:企业级解读(二)
- 信息学奥赛一本通 第五章 第五章 数 组 第一节C语言非C++