遥感论文 | ISPRS | 图神经网络也能做城市街道功能感知?纯视觉方案,效果可观!

- 论文题目:Knowledge and topology: A two layer spatially dependent graph neural networks to identify urban functions with time-series street view image
- 论文网址:https://www.sciencedirect.com/science/article/pii/S0924271623000680
- 论文代码:https://github.com/yemanzhongting/Knowledge-and-Topology
摘要
提出一种用于街景尺度城市功能识别的纯视觉、强大而可靠的方法。
引入了一种基于两层空间相关图神经网络结构的方法,该方法将连续的街景图像作为输入(通常在Google Street View、百度地图和Mapillary等服务中可用),充分考虑了道路网络之间的空间依赖关系。以武汉市为例,使用OpenStreetMap数据构建了一个城市拓扑地图网络,并使用大规模预训练模型计算了在街景尺度上整个场景的语义表示。基于由75,628个街景图像和5,458条街道构建的28,693个映射关系,以街道为节点构建了图网络。在研究区域的所有节点中,只需要对5.3%的节点标签进行10个功能类别的获取。
结果表明,通过使用适当的空间权重、街道编码器和图结构,我们的新方法实现了P@1 46.2%、P@3 73.0%、P@5 82.4%和P@10 89.9%的高准确率,充分展示了引入方法的有效性。我们还使用模型通过计算时间序列街景图像来感知城市的时空更新。该模型还适用于其他属性的预测,在这些预测中只需要少量标签就可以获得有效和可靠的场景感知结果。
背景
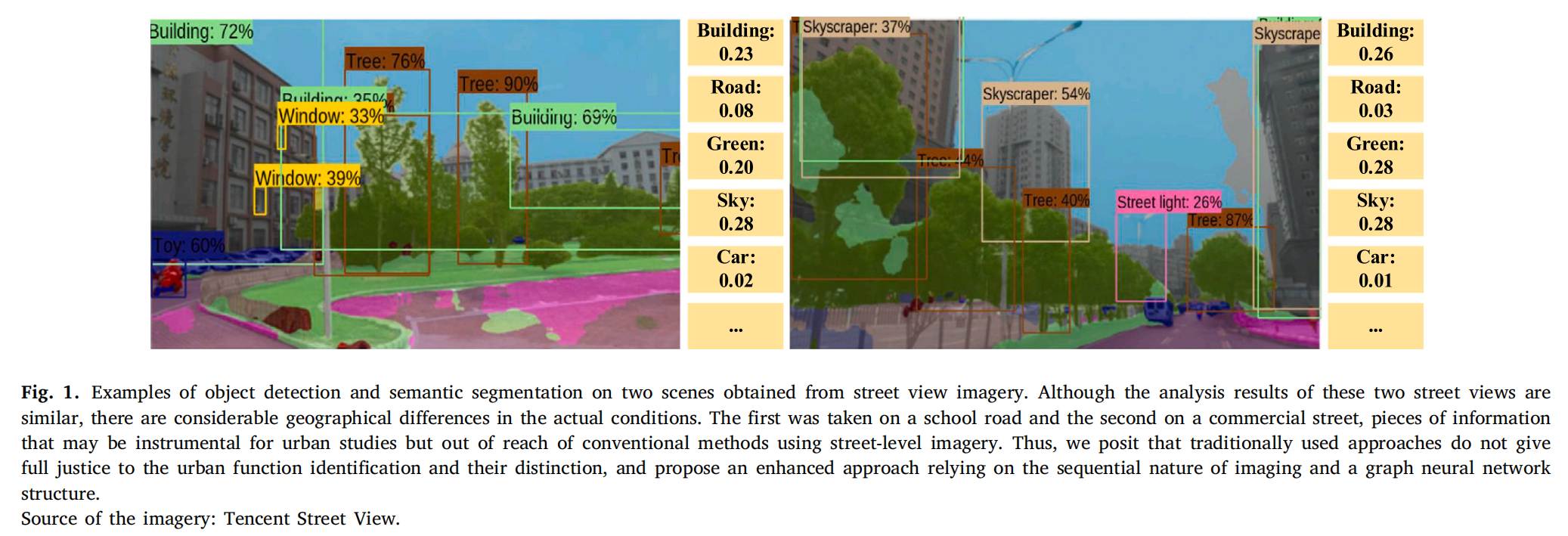
如图1所示,对街景图像进行的语义分割和目标检测的结果都缺乏全面的语义信息。即使两个图像在语义分割后具有相似的各种元素的比例,或者在目标检测后存在相同的客观特征,由于元素或特征之间的不同空间关系,这两个图像描述的实际情况可能存在相当大的地理差异。更具体地说,图1中的街景图像都包含了建筑物、窗户、树木、路灯、摩托车和汽车等实体。此外,这些实体在两幅图像中所占的像素比例是相似的。例如,图1左图中建筑的像素比例为23%,绿植的比例为20%,天空像素比例为28%,而图1右图中建筑的像素比例为26%,绿色视图指数为28%,天空视图因子也为28%。通过以上信息,仅仅通过实体的类型、实体的数量或视野像素比例来找到两个位置的街景图像之间的差异是困难的。
如图2所示,为了捕捉街景之间的空间关系,将道路数据作为网络结构,选择具有多个街景的街道作为最小的空间单元。设计了捕捉两层空间关系的方法,第一层是捕捉不同视图中的重叠实体,第二层是捕捉街道之间的空间拓扑关系。数据来源于OpenStreetMap(OSM)
方法
模型框架
- 模型分为5部分,Step1和Step2是模型Encoder,Step3,Step4,Step5是模型Decoder

Step 1: Cross-modal extraction scenario description (Street View Captioning)
下图显示了跨模态计算的详细步骤,其中我们输入一张街景图像并输出相应的文本描述,“一辆红色汽车停在路边”。描述包含了城市的重要物体、物体的性质以及物体之间的空间位置关系。因此,我们可以提取类似于(“一辆红色汽车” ->s“,停在‘‘->r’’路边的‘‘->o’’路”)的三元组。我们对每张图像执行类似的计算,将其聚合形成每个街道的语义描述。
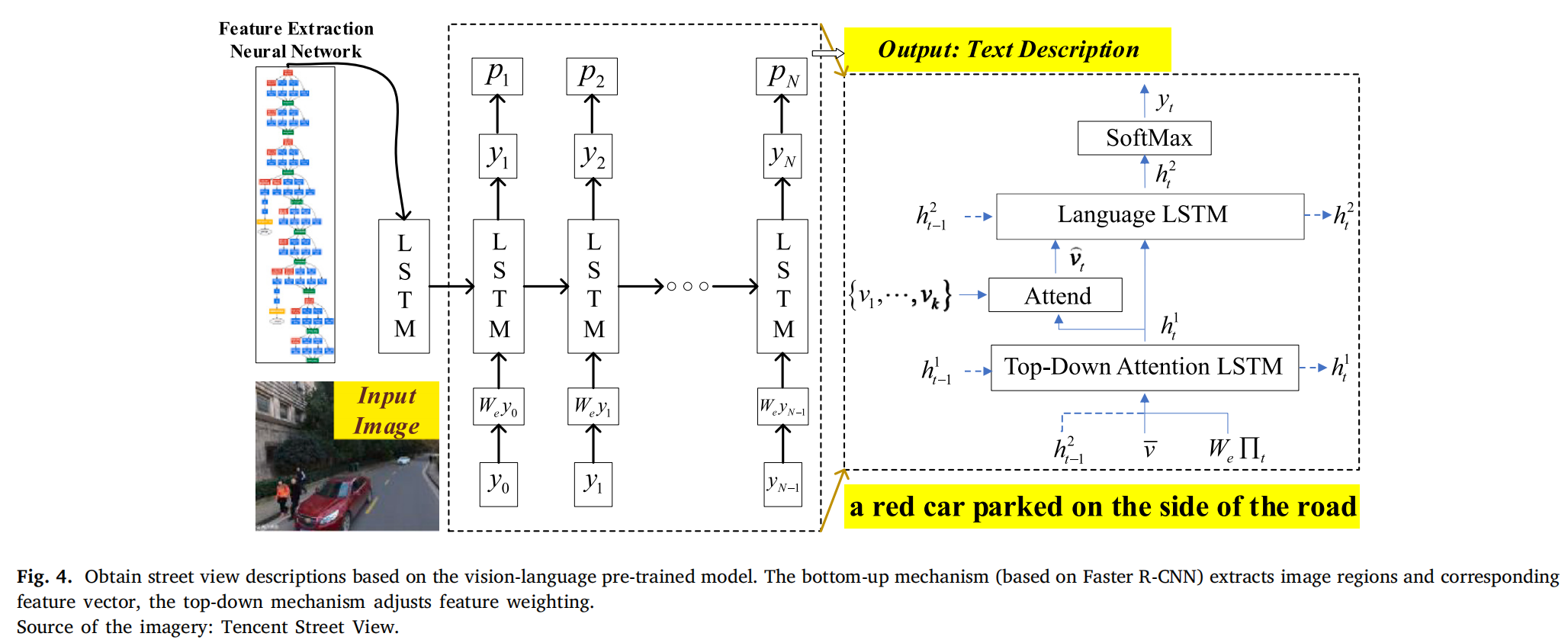
序列生成单元由两个LSTM层和一个Attention层组成。如图4所示,该模型使用目标检测网络提取图像特征,并将图像分成𝑘个区域,这些区域与包含𝑁个单词(标记)的文本描述一起馈送到循环神经网络中。
Step 2: Aggregate the images and calculate the scene embedding of the street
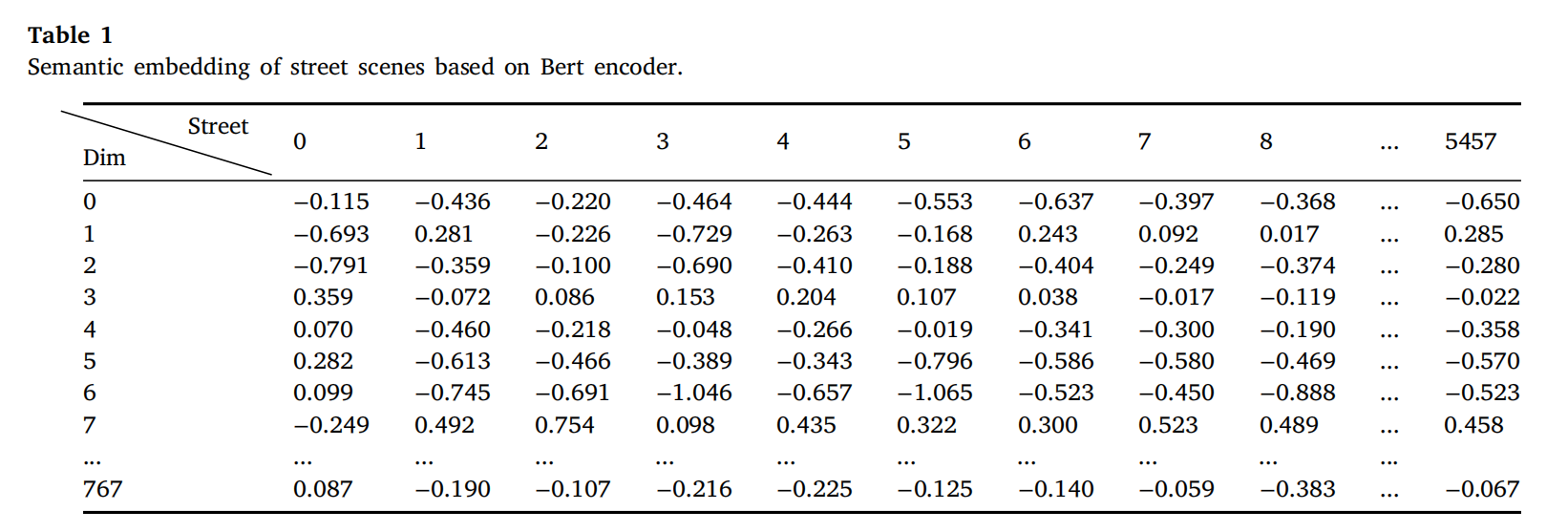
基于Step1生成的场景描述,我们将街道视为包含多个“句子”(街景)的“文档”。通过街景与道路网络之间的映射,我们可以获取街景邻域信息,然后计算整个街道的特征码。使用BERT模型对“文档”进行编码,生成一个 𝐷(768) 维的场景嵌入作为模型初始化的输入。实验部分还将比较不同嵌入方法的计算效果。表1表示使用Bert作为语义编码器进行街道嵌入计算的结果(5458个街道,768个维度)
Step 3: Labeling and spatial weights (road network topology)
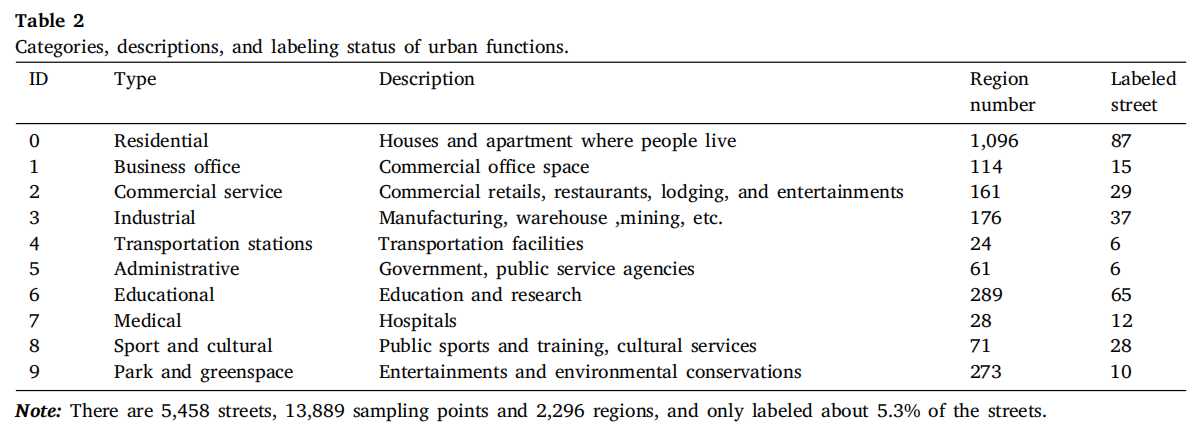
本文评估利用街景识别城市街道功能的能力。我们使用EULUC-China数据集为街道贴标签,构建了一个包含表2中十种标签的街道功能数据集,为了标注,我们为采样位置设置了25米宽的缓冲区(50米可以覆盖大多数城市道路宽度),该缓冲区在空间上与功能区域相连接,以标记街景图像。如Step1中所述,我们已经建立了街景与街道之间的关系,因此在这里,我们简单地计算包含最多类别的街景标签,作为街道的主要功能。一些街道包含多个贴了标签的街景。对于这些街道,我们选择具有更突出功能的街道作为训练数据。如表2所示,我们标记了190条街道,总体标注率为5.3%。(原来贴标签也是可以写到论文里的)
Step 4: Build semi-supervised graph neural network for training
模型训练过程定义如下:(简而言之两层GCN)
- 通过𝑓函数对模型进行前向传播。
- 计算已知节点标签上的交叉熵损失。




Step 5: Model prediction and accuracy evaluation
基于Step4中训练的模型,我们对研究区内未标记的街道进行功能预测。由于我们采用半监督机器学习方法,我们只包括数据的一小部分标签。我们借用推荐系统的准确性标准,通过 𝑃@𝐾 分数来衡量模型的准确性,该分数计算了最近的 𝐾 个区域中包含正确预测标签的比例。因此,𝑃@𝐾 表示在测试数据中预测的街道标签是否出现在最近 𝑛𝑒𝑎𝑟𝑒𝑠𝑡 ? 𝑘 个真实区域标签列表中(第3步中的EULUC-China数据集被视为实际值)。𝑁𝑢𝑚 表示测试数据的数量,𝑛𝑜𝑐 表示这种况发生的次数,如下所示:

实验
研究总览
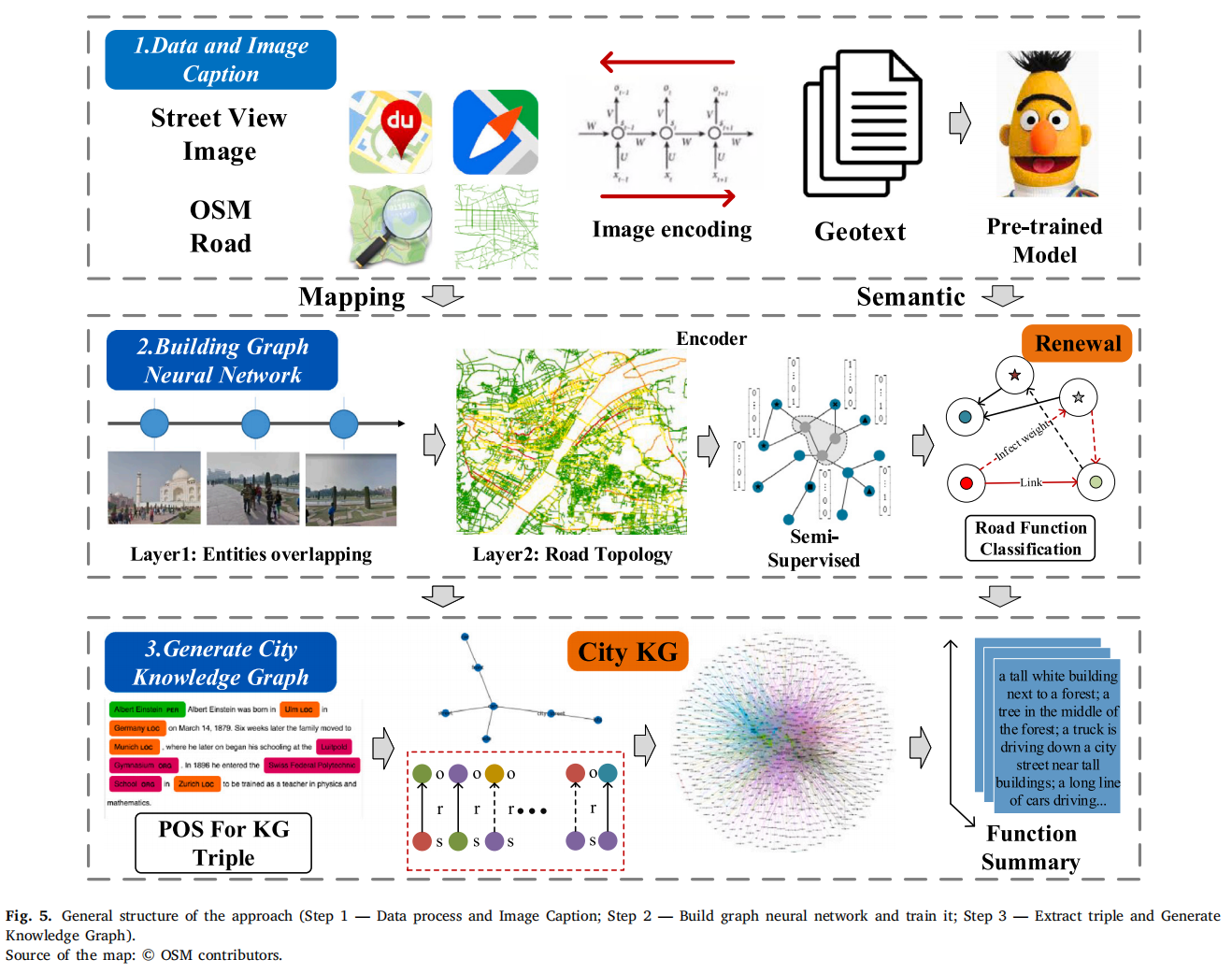
如图5所示,这项研究分为三个主要部分。
- 第一部分是街景图像的跨模态解码器,用于获得城市场景的高度语义压缩描述;
- 第二部分是解码器结果的语义编码器,与OSM网络拓扑关系一起输入到图网络进行半监督学习;
- 最后,从图像中提取知识三元组,生成街道语义知识图谱和每个城市功能下的文本摘要,使城市不仅可以被“观察”还可以被“阅读”。
实验配置
研究区域位于中国武汉市的第三环内,收集了75,628张腾讯街景图像,这些图像采样时间与EULUC-China产品发布时间相近,而使用了在研究区域感知最近城市建设的64,750张新的(于2022年7月采集)百度街景图像。通过计算不同时间的图像,我们探讨了城市功能的转移以及来自不同数据源的方法的有效性。研究区域包含许多多样的城市场景和实体,包括5,458条OSM道路和18,907个街景采样位置。基于图4中第1步提到的预训练视觉语言模型,我们对研究区域的75,628张街景图像进行了跨模态解码,并为每个图像生成了最相关的五个场景描述。因此,在Tesla P100 GPU上进行了约72小时的计算后,我们总共获得了378,140个句子。
精度对比
对比不同模型
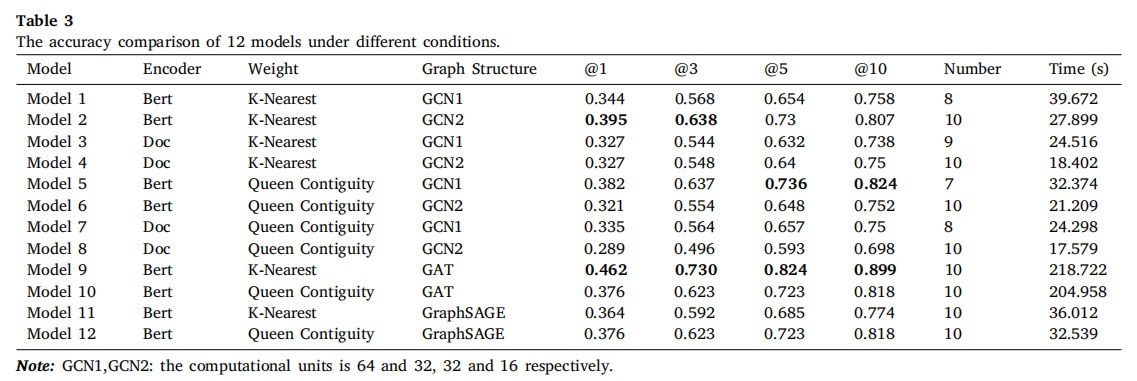
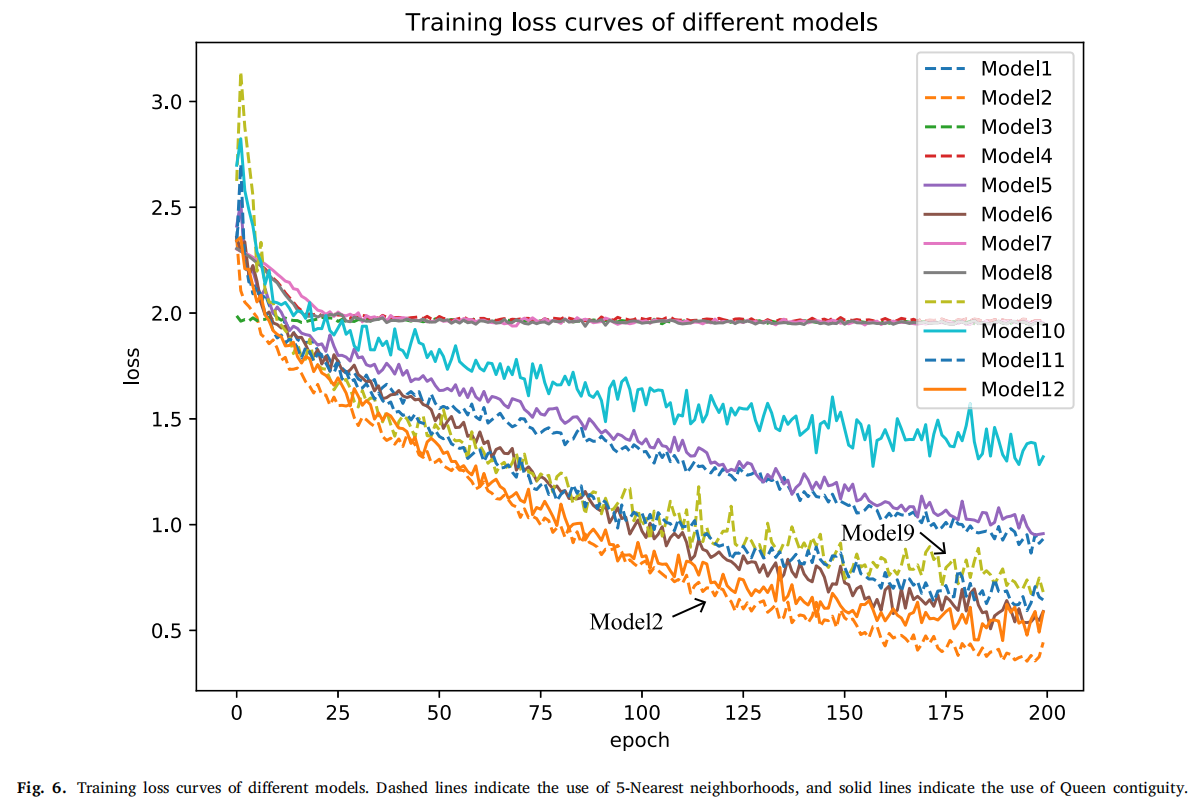
我们进行了12组对照实验,使用了不同的模型,如表3所示。这些模型之间的主要区别在于不同的语义编码器、空间权重矩阵和图特征提取网络,每个模型都被赋予一个唯一的名称(Model1,Model2等)。我们对所有12个模型进行了200轮的训练周期,以测试它们的预测准确性,训练损失的变化如图6所示
跟其他传统模型对比
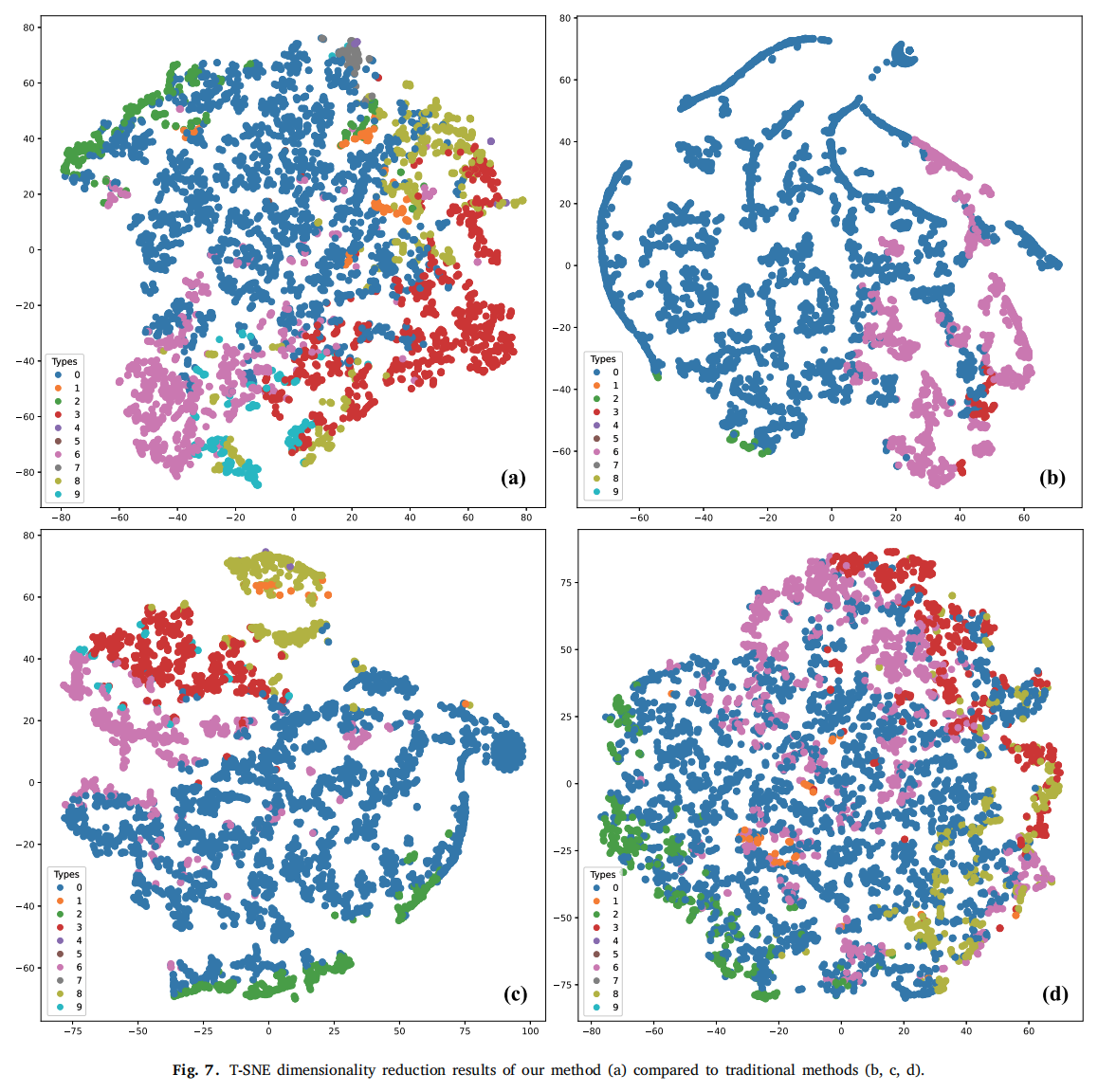
我们还通过传统的机器学习方法多层感知机(MLP)进行了结果比较,而不考虑空间拓扑关系。如图7所示,图7(a)显示了模型9的预测特征向量降维结果,图7(b)、?显示了MLP特征向量降维结果,其中神经元个数分别为32和128,并且Bert也用作语义编码器。图7(d)显示了使用两层神经网络的情况。我们可以看到,传统方法远不如我们的方法有效,预测结果中缺少一些类别(仅有四个类别)。我们方法相对于传统方法的优势在于,我们的预测不仅考虑了当前街道环境,还考虑了相邻街道的环境。
预测结果展示
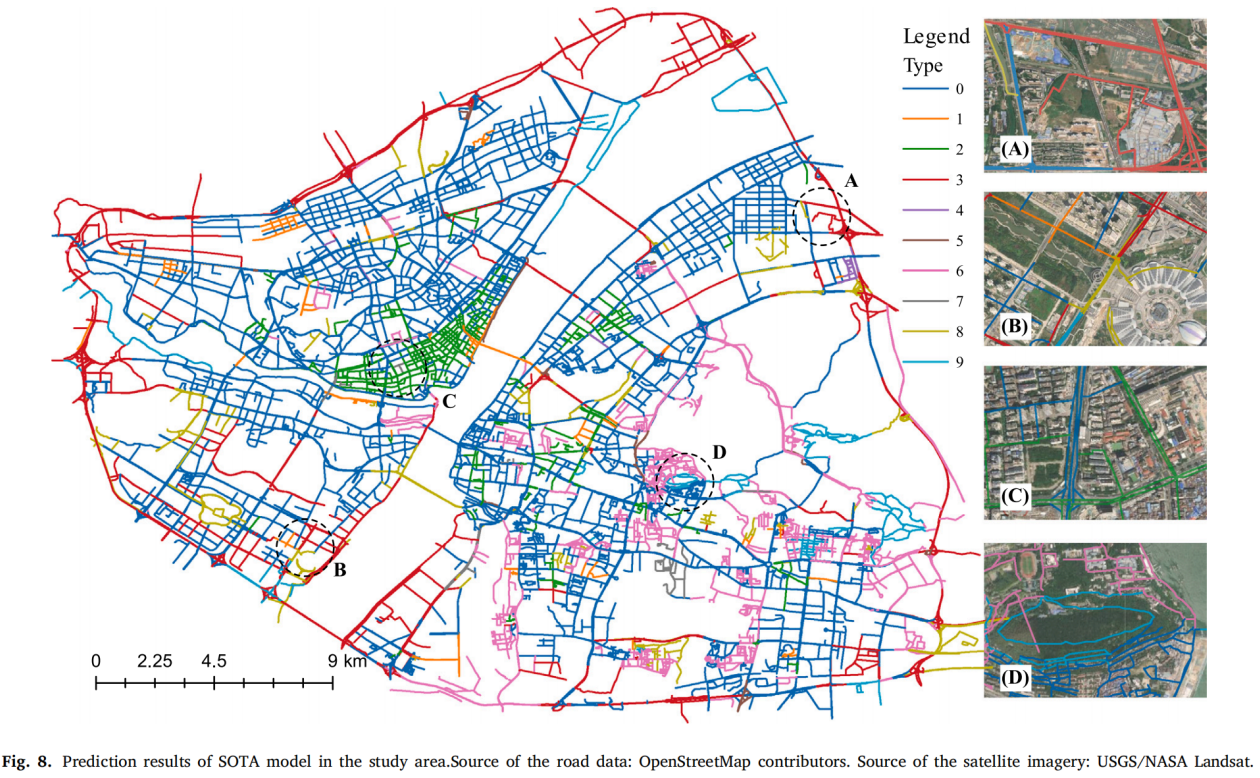
最高准确率的模型9的预测结果如图8所示。可以看到,预测结果在细粒度上生成,标签0到9分别是住宅、商务办公、商业服务、工业、交通站点、行政、教育、医疗、体育文化、公园绿地。如图8子图所示,街道是城市的“末梢”,我们的模型可以在两条街道之间的短距离内识别实际且不同的功能。与使用建筑物足迹或TAZ作为空间单元相比,我们可以定位更丰富的结果,也擅长探索同一区域的多种功能。
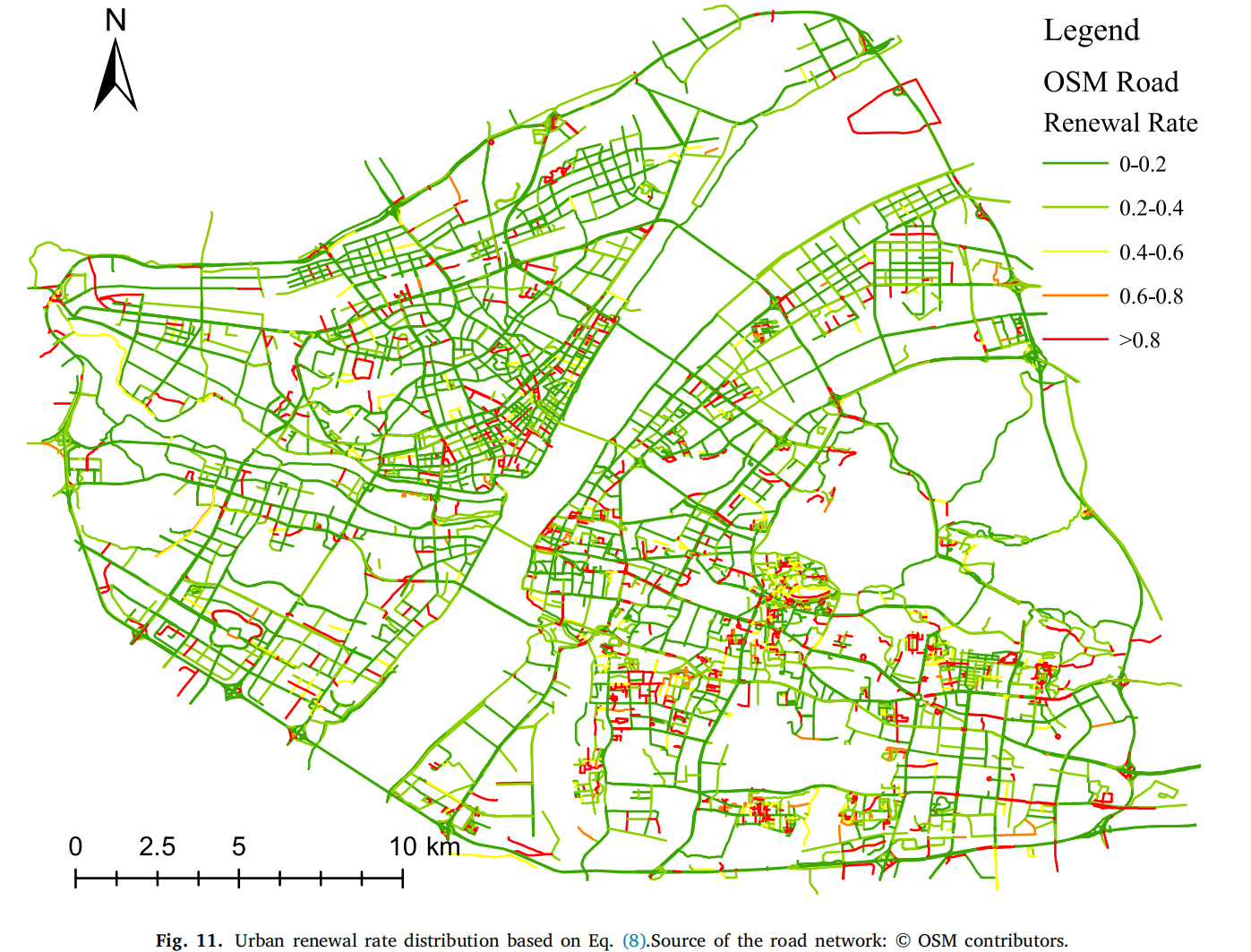
基于步骤2中不同数据生成的街道嵌入,我们基于等式计算街道更新率如公式8所示,用于分析近年来城市功能的演变趋势。

在图11中,大部分地区,特别是城市的主要道路,变化较小。同时,一些地区发生了显著变化(更新率> 0.8)。此外,我们在表5中绘制了总体城市函数转移矩阵。
转移矩阵如表5所示

街道语义知识图谱构建
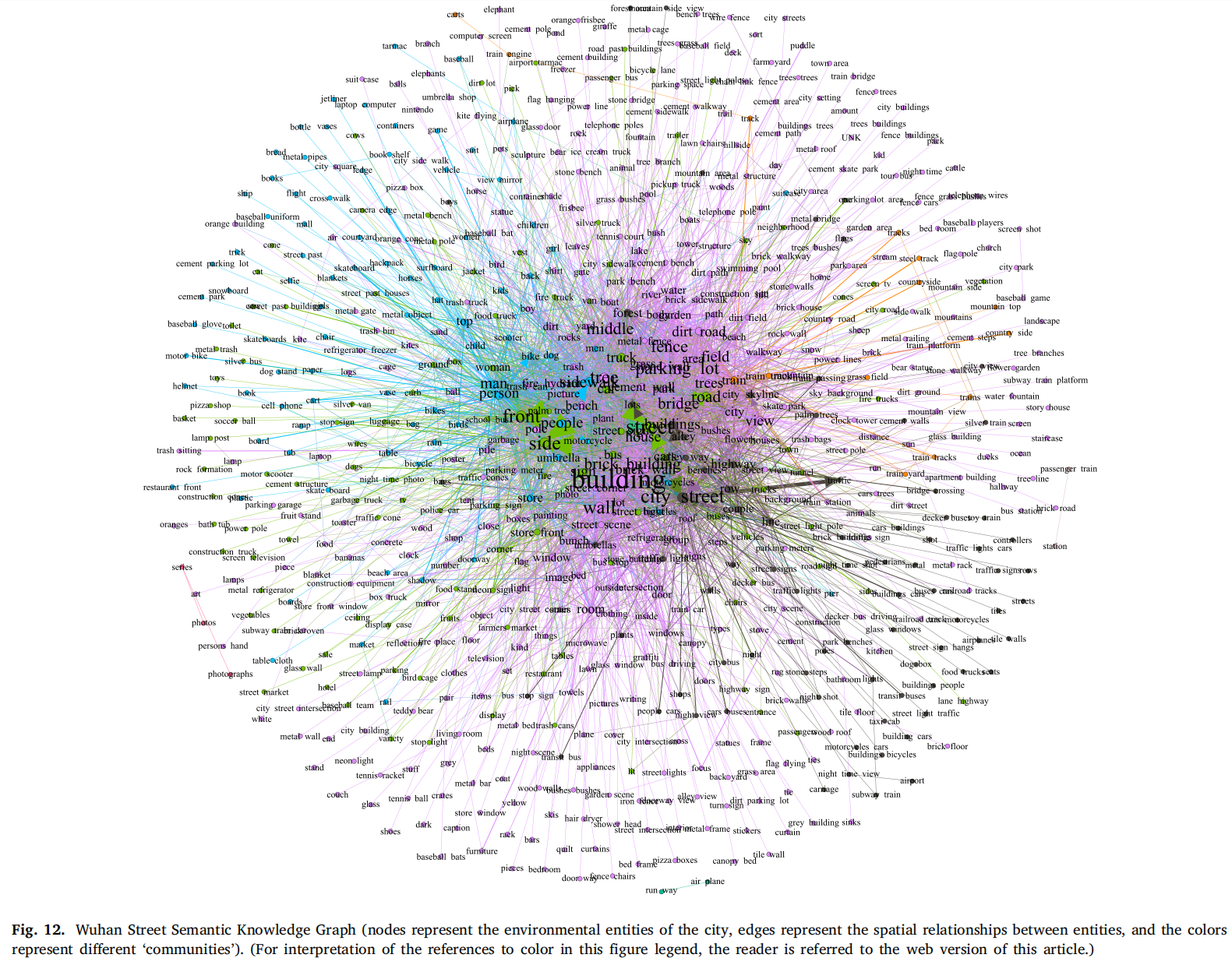
我们对所有场景执行类似的计算,得到了75,628个城市知识三元组。基于这些知识三元组,我们生成了武汉所有街道的语义知识图,如图12所示。它包括707个城市环境实体和4,371个空间位置关系。较大的节点表示实体的出现频率较高,边的粗细表示相关关系的强度。之后,我们的基于图的社区检测方法(Louvain方法)将这些实体和关系划分为多个社区,社区内的实体与社区外的实体相比,更频繁地共现,我们在这里不进行深入解释。
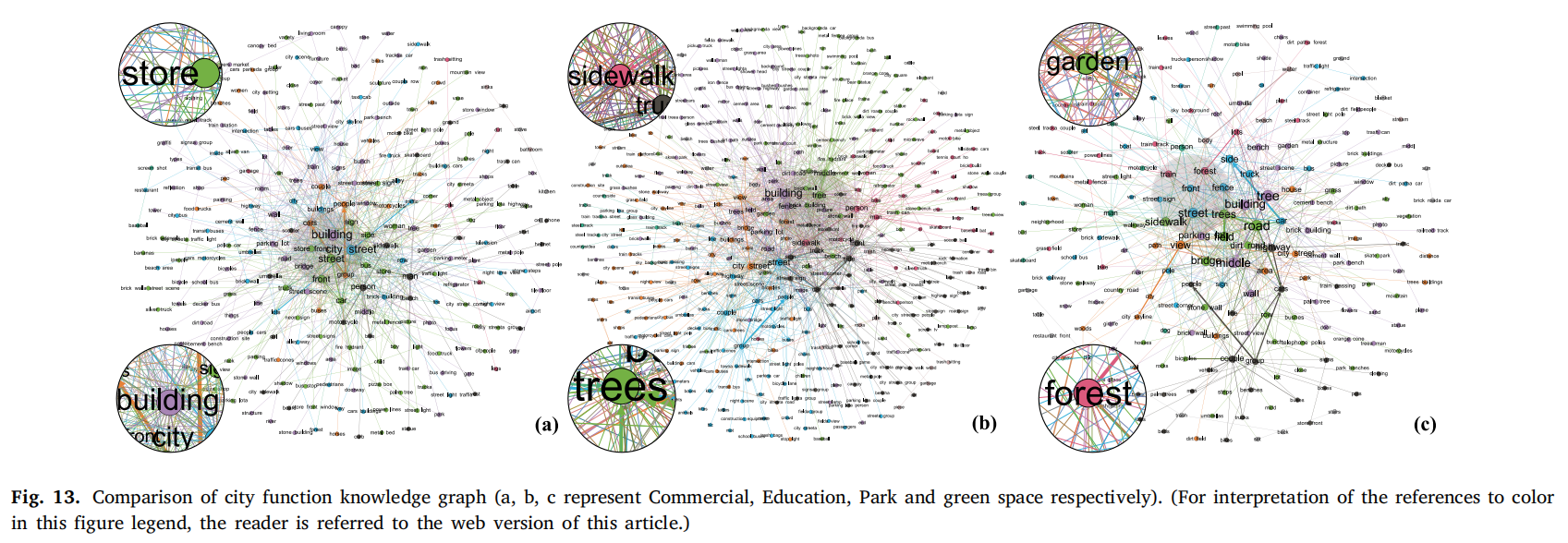
几个特定城市功能知识图谱的对比
讨论和小结
在本文中,我们提出了一种纯视觉方案,用于感知城市街道的功能,它整合了城市知识和道路网络拓扑,能够融合多源图像以生成空间单元的整体表示。我们还融入了时间信息,并整合历史街道图像,计算城市时空变化、更新率和城市功能转变矩阵。优势如下:
- 只要图片能够显示地方的实际状况,就可以在计算中包含街景和其他近感图像,并生成语义表示(城市说明)。
- 研究单元不仅仅局限于街道尺度,还可以推广到其他尺度,即使是一个小的采样点或一个区域。不同尺度之间仅在语义描述文本的长度和空间拓扑关系的长度上有所不同。
- 由于城市中充满了人类活动的足迹,近感图像可以深入城市,实时反馈 “人”、“车”和“物”的原始形状和颜色信息。相比之下,城市空间中的遥感图像很难具有如此高的空间和时间分辨率。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- LeetCode.2865. 美丽塔 I
- 经济危机下,我们普通人如何翻身?2024创业新风口,适合普通人的创业项目
- 科技顶天,市场立地 。璞华科技“顶天立地”的成长之路
- APT(高级持久性威胁)组织
- 使用Docker一键部署Uptime Kuma,并将监控服务映射至公网访问
- PLM项目管理系统是什么? PLM项目管理系统的优势
- 【江科大】STM32:中断系统(理论)
- 51单片机汇编指令表--STC宏晶MCU
- 机器学习实践
- android 自定义键盘长按弹窗