ROS学习记录:使用RViz观测激光雷达传感器数据
发布时间:2024年01月01日
一、使用Ctrl+Alt+T打开终端
二、输入 cd ~/catkin_ws1/ 进入工作空间
三、输入source ./devel/setup.bash
四、输入:
roslaunch wpr_simulation wpb_simple.launch
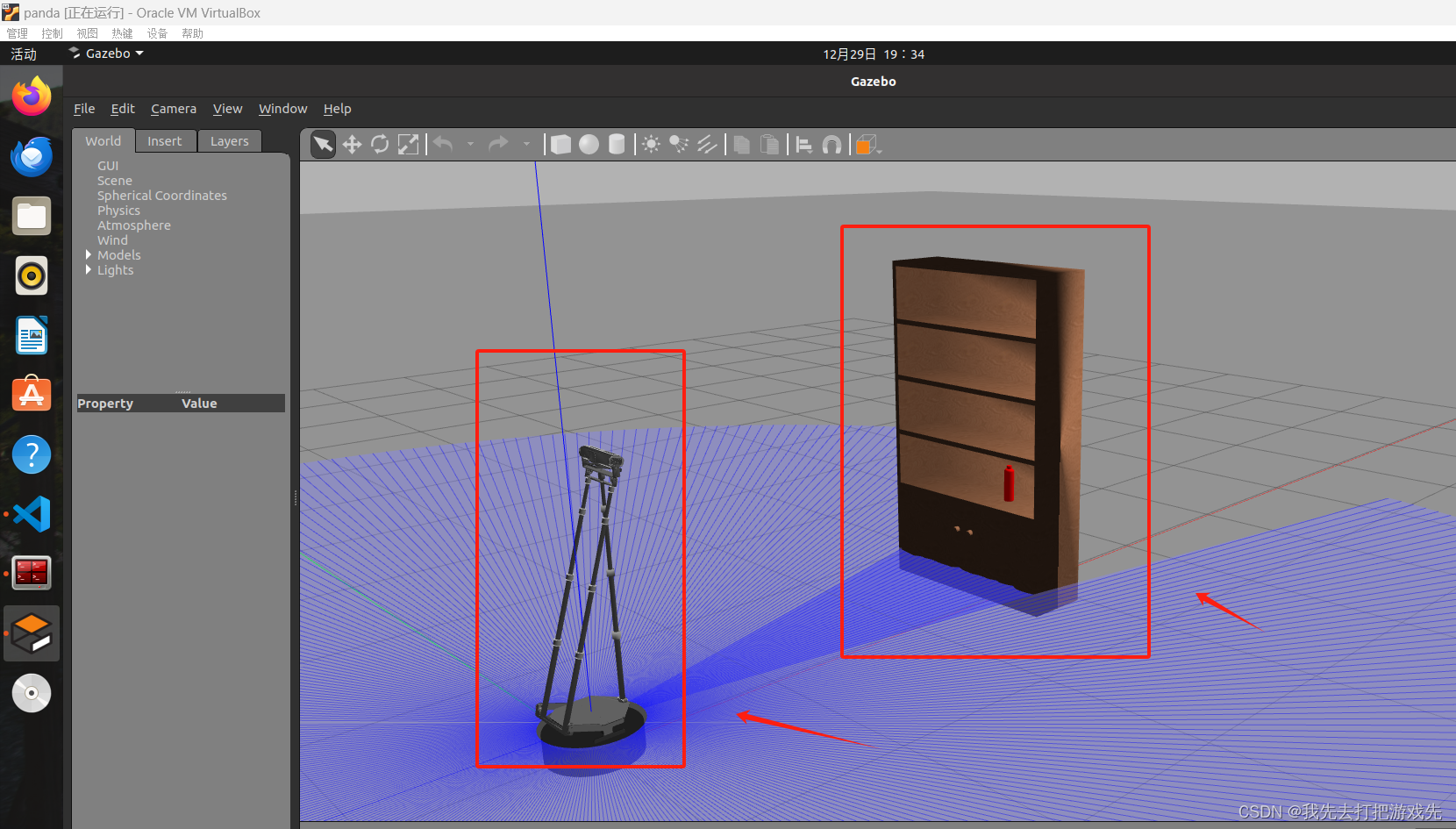
打开机器人仿真环境
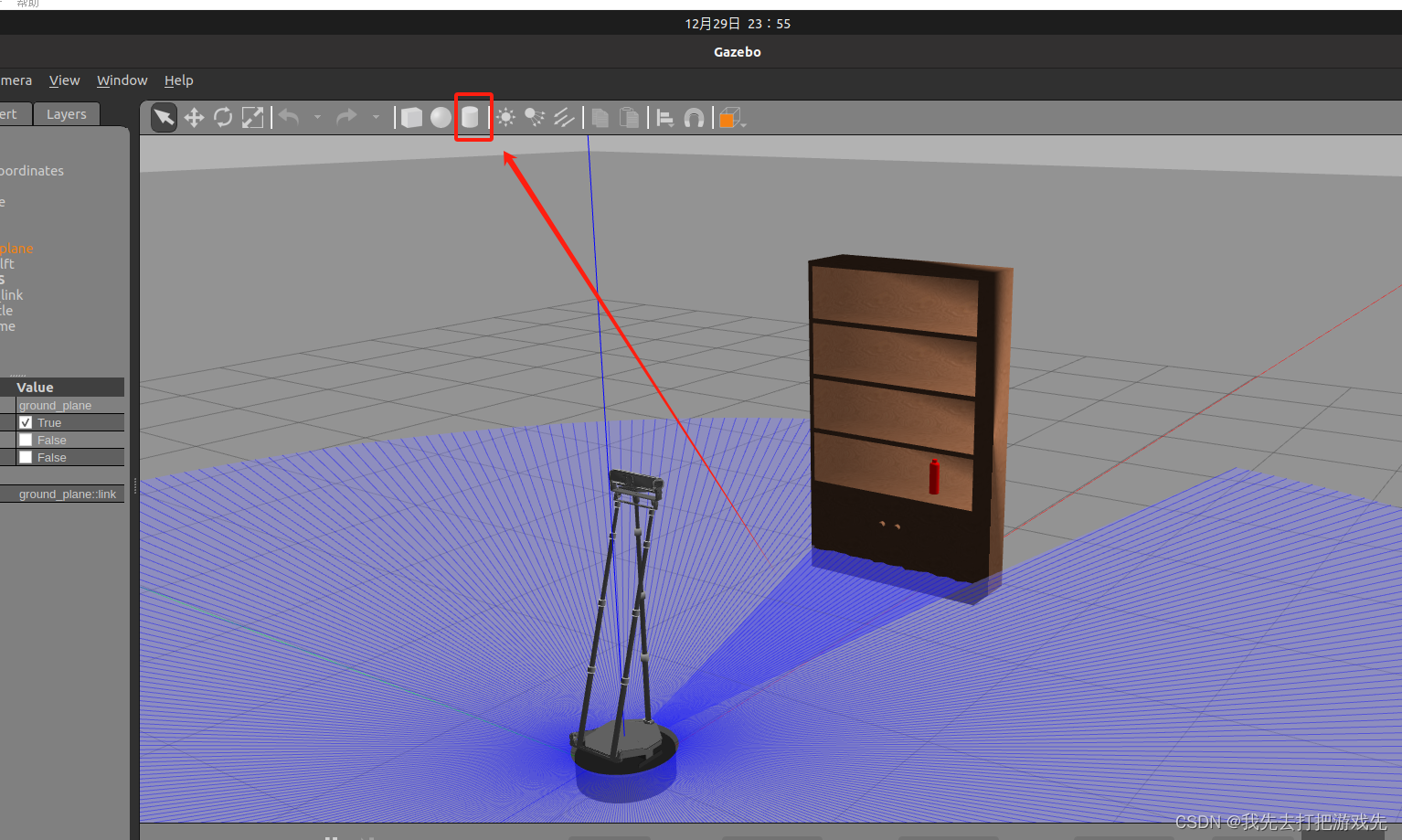
五、这是机器人仿真环境,里面机器人和书柜
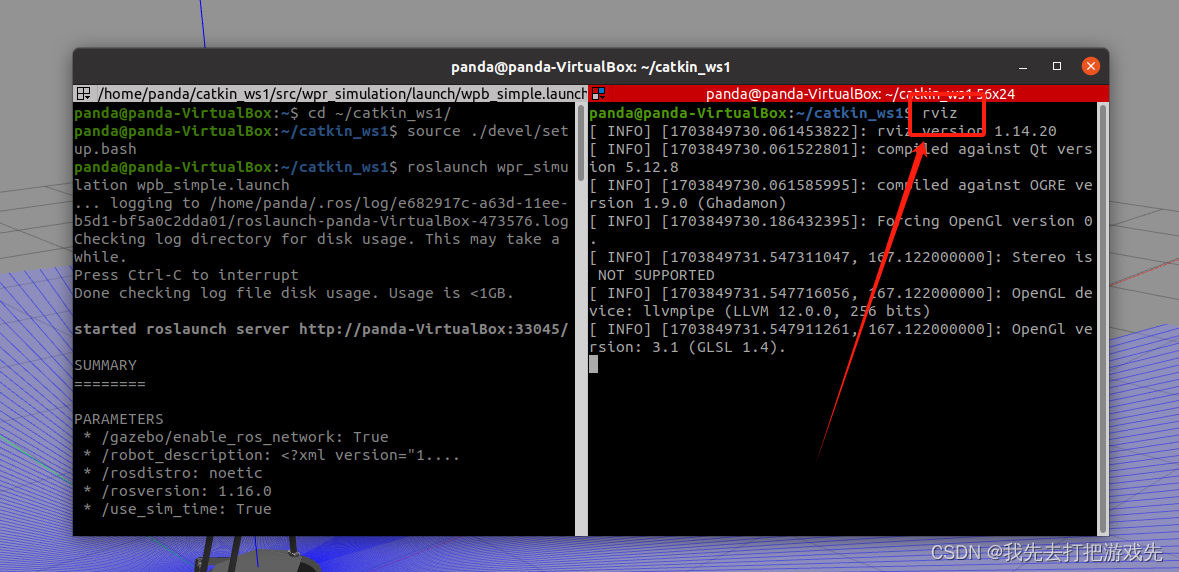
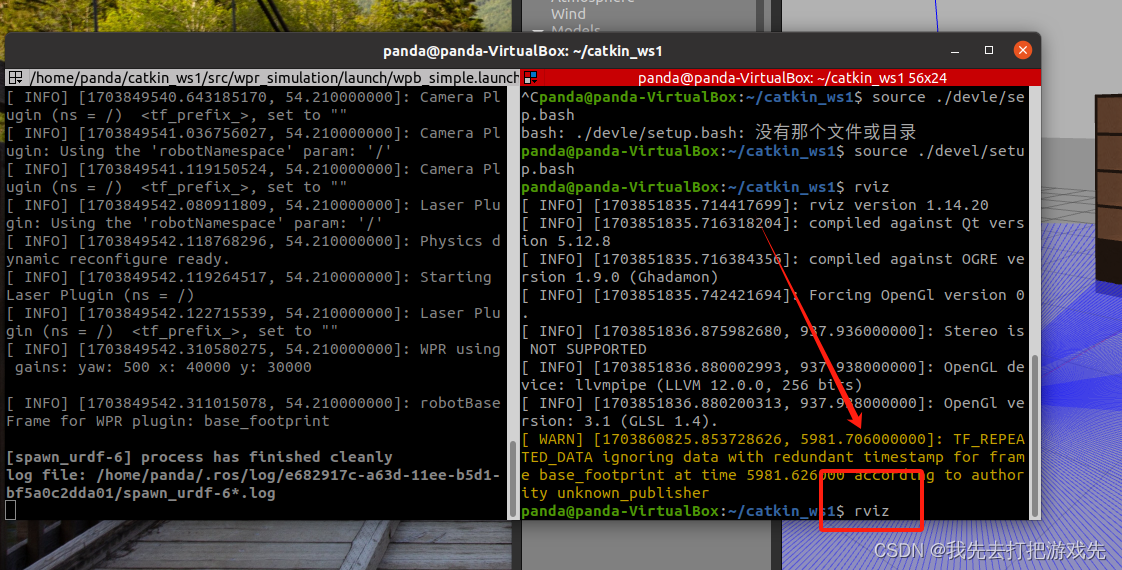
六、再开一个终端,输入rviz,回车后打开RViz(注意!打开rviz前,在这个新打开的终端先输入source ./devel/setup.bash 先记得source一下,不然后面可能会报错)
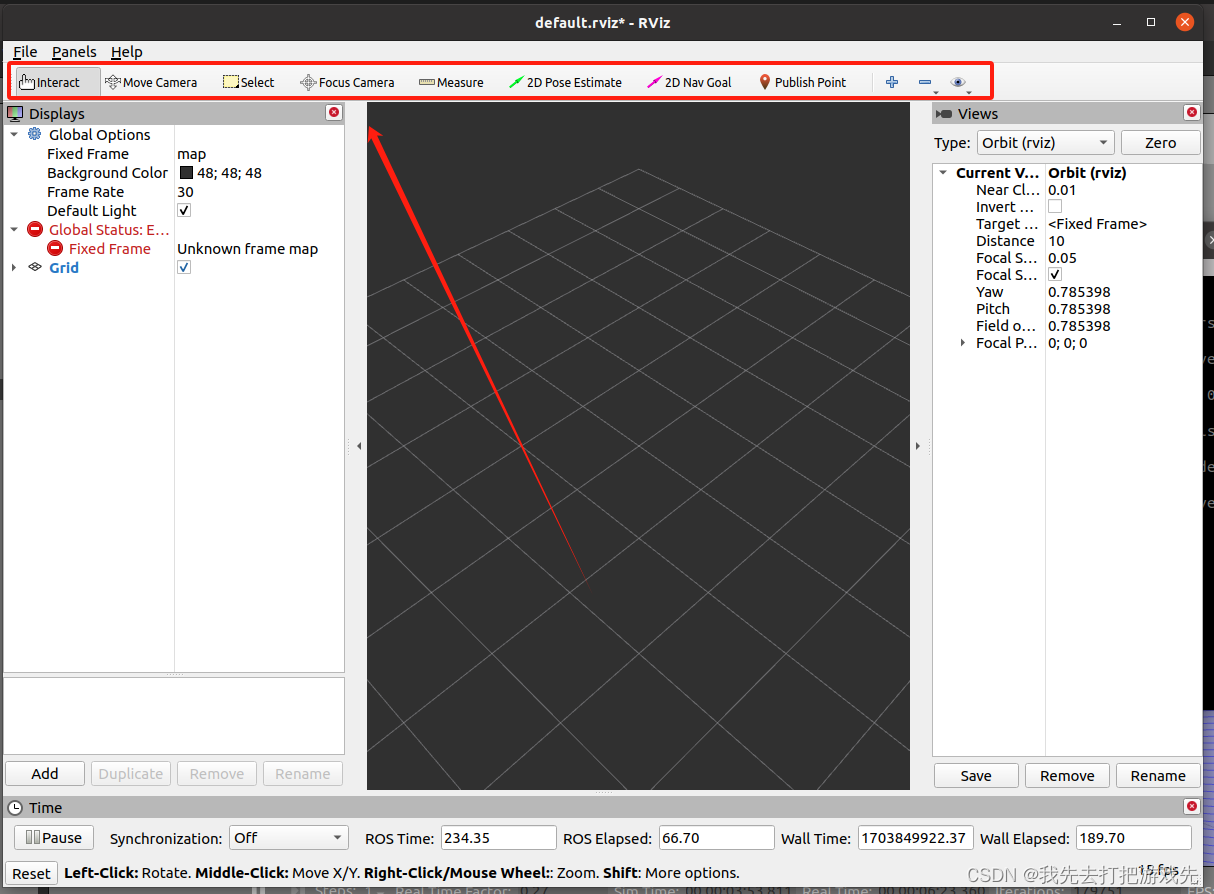
七、这个就是RViz的主界面
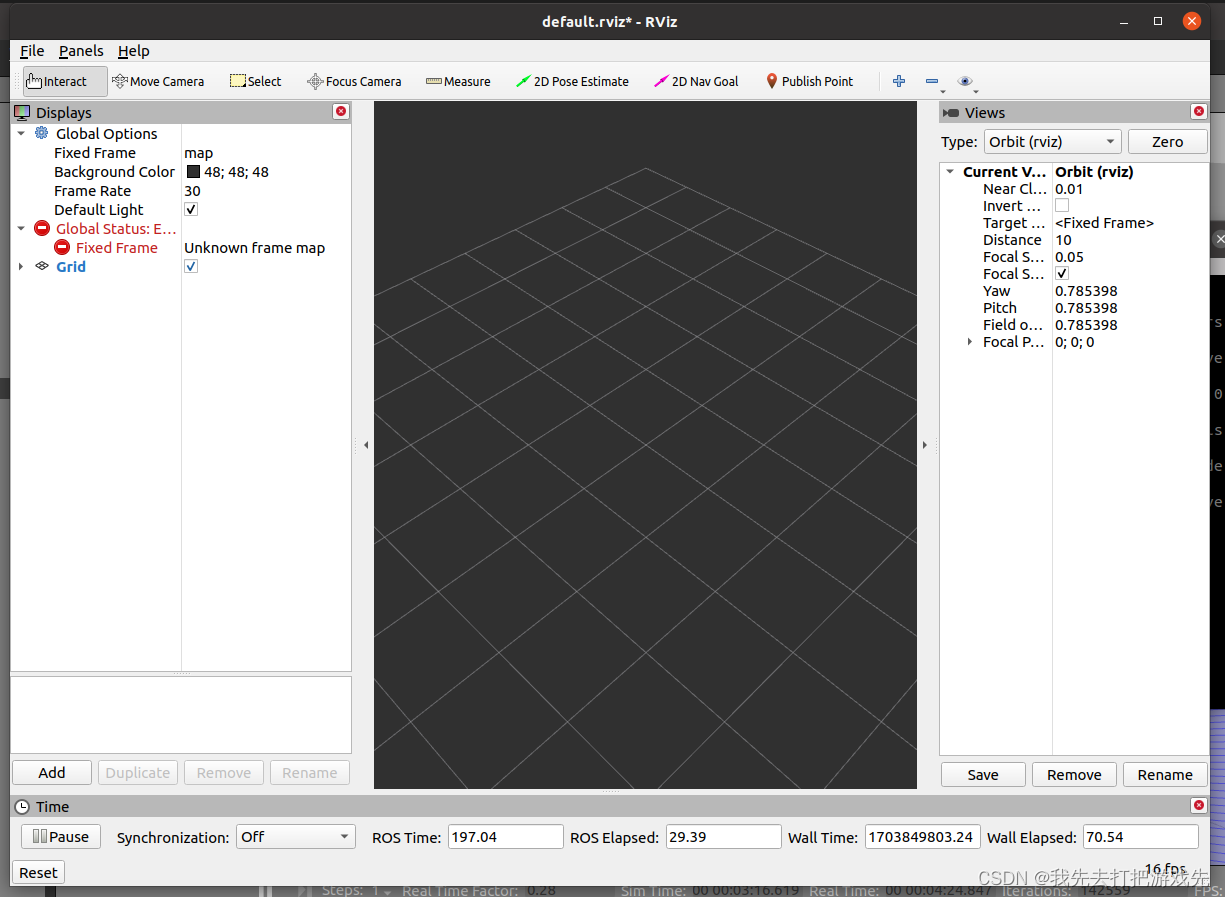
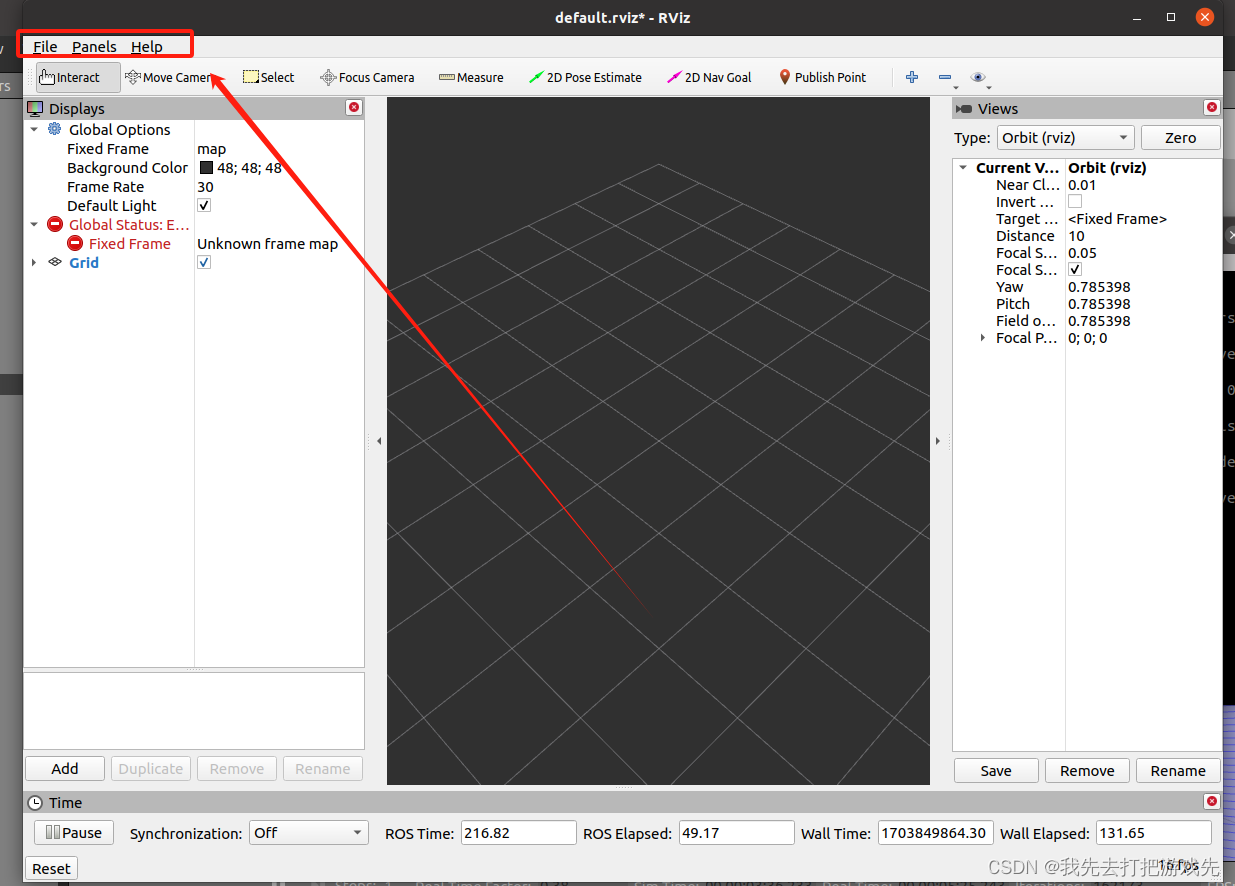
八、最上面是菜单栏
九、这里是工具栏,一部分常用的操作会以按钮的形式排列在这上面
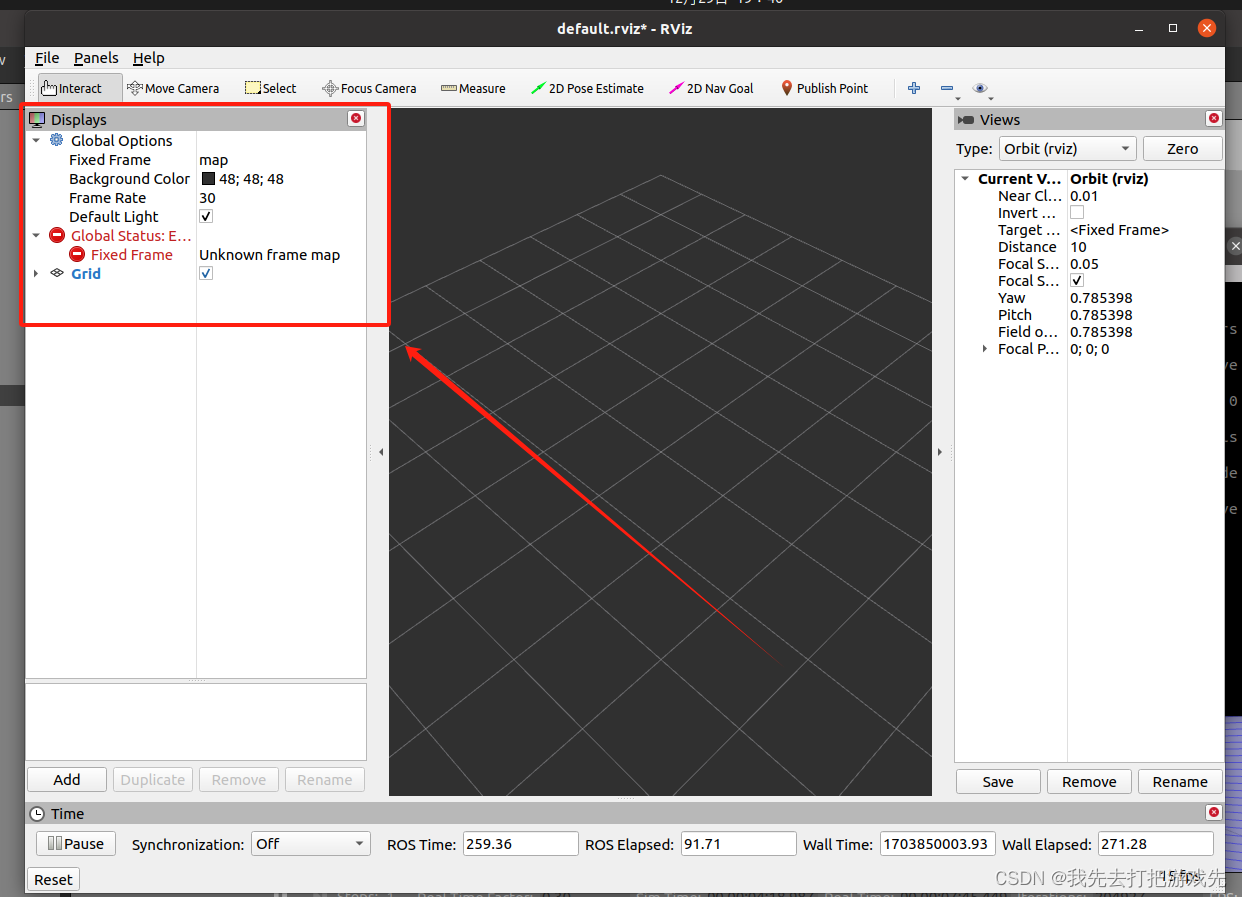
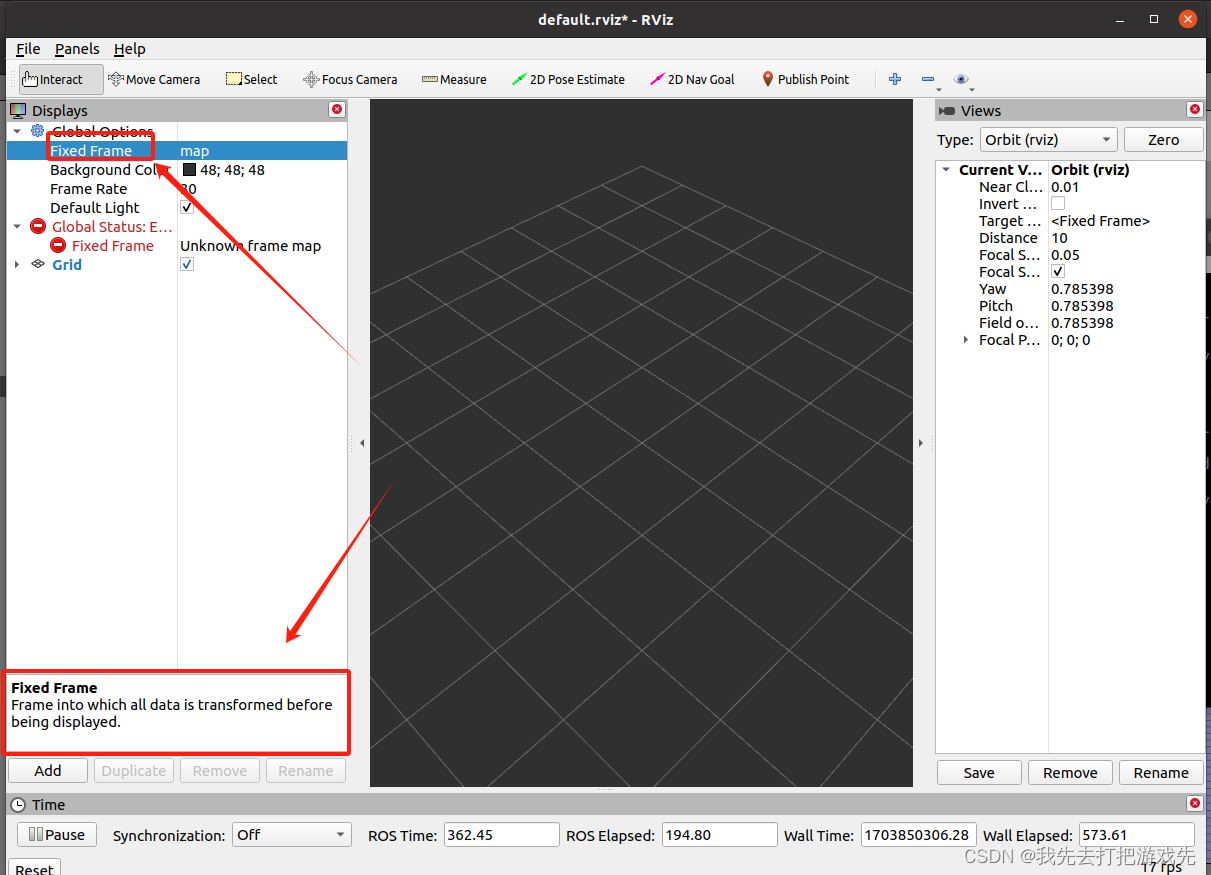
十、这是可视化项目的列表
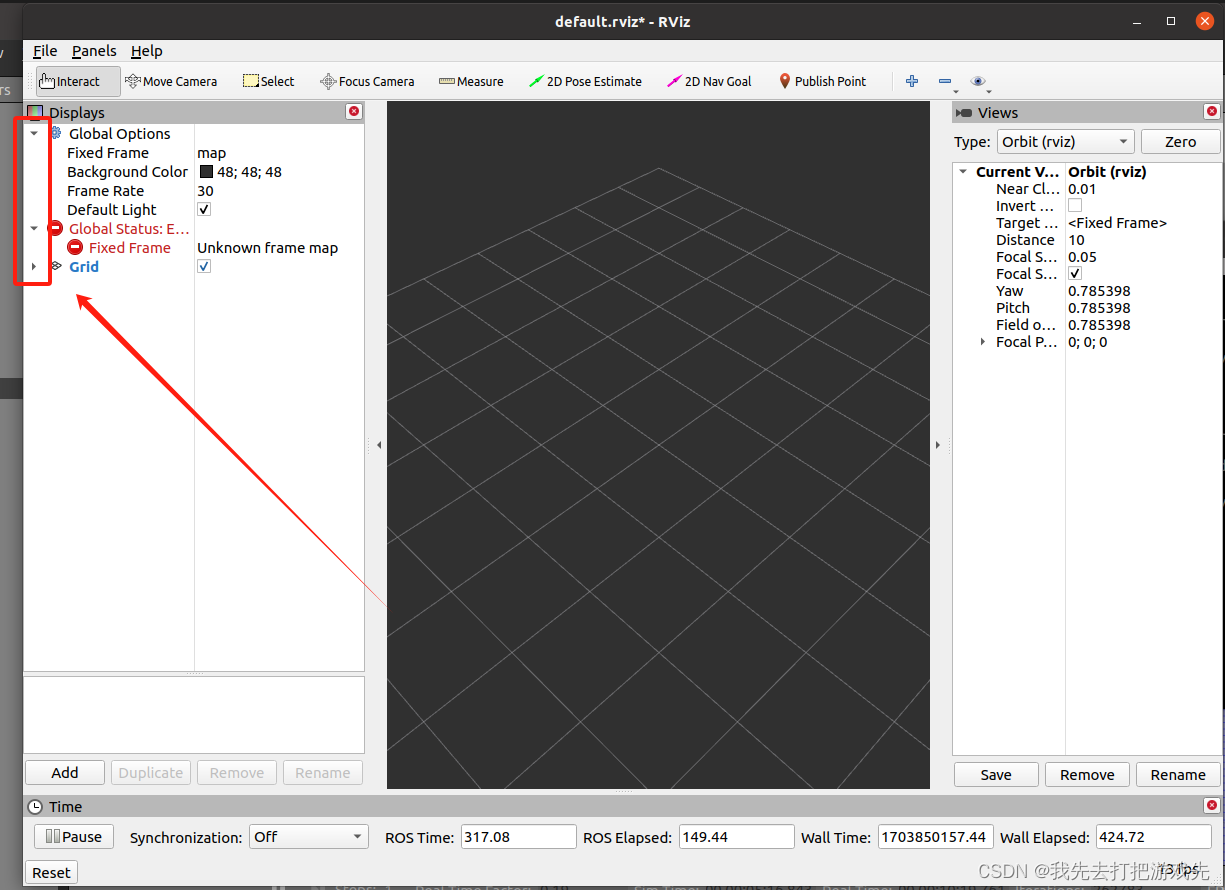
十一、带三角小箭头的是可视化项目的名称
十二、这些是可视化项目参数的设置
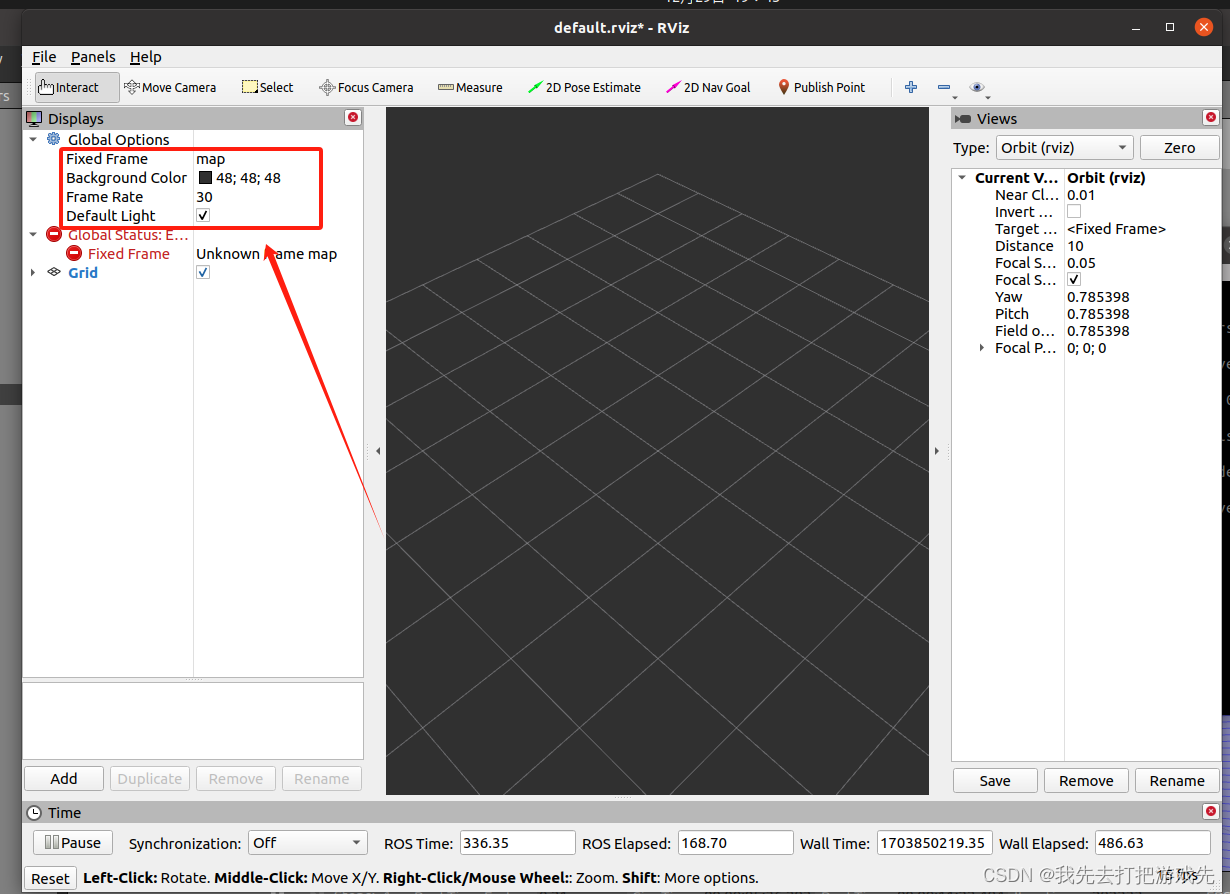
十三、当我们点击某个参数的时候,左下角的小方框会显示这个参数的简单解释
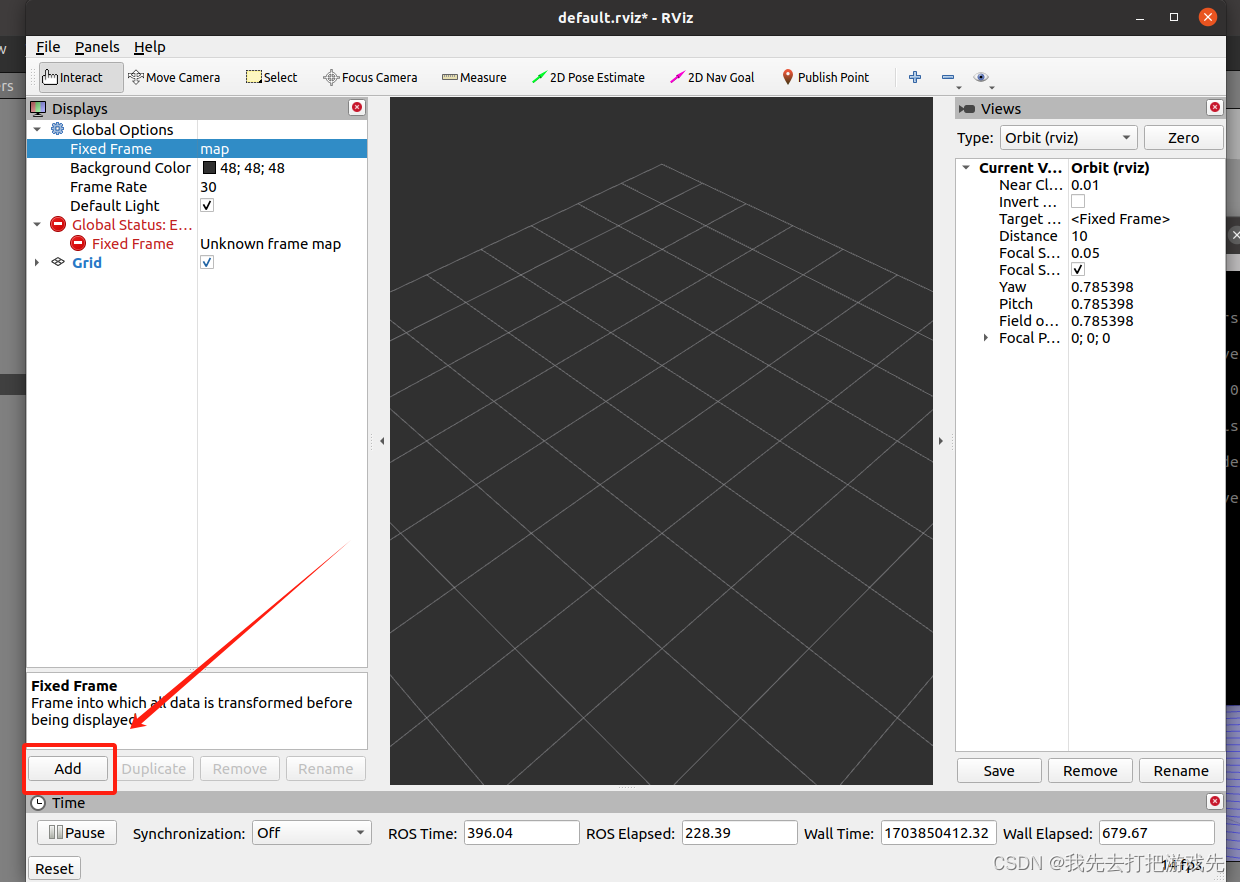
十四、这个是添加可视化项目的按钮
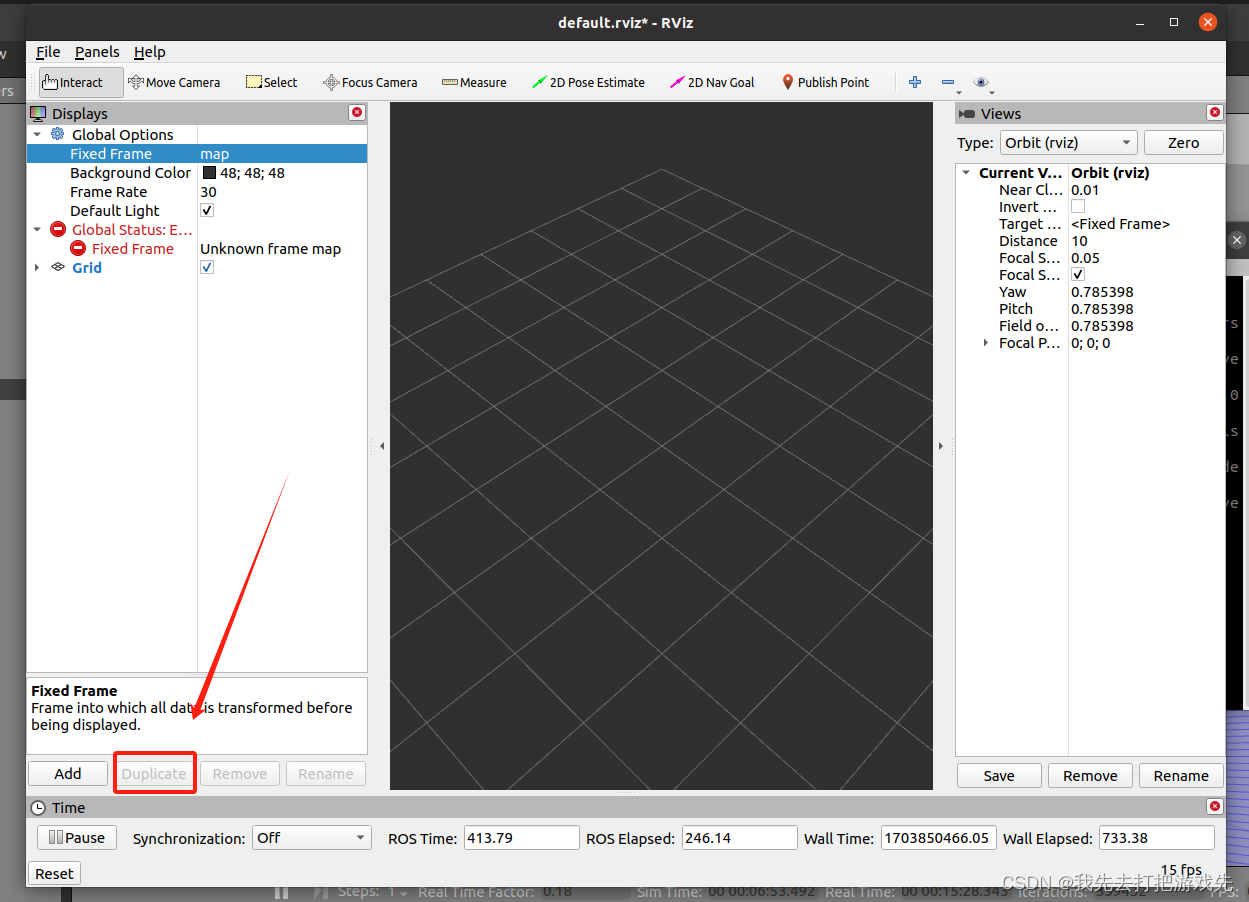
十五、这个是复制可视化项目按钮
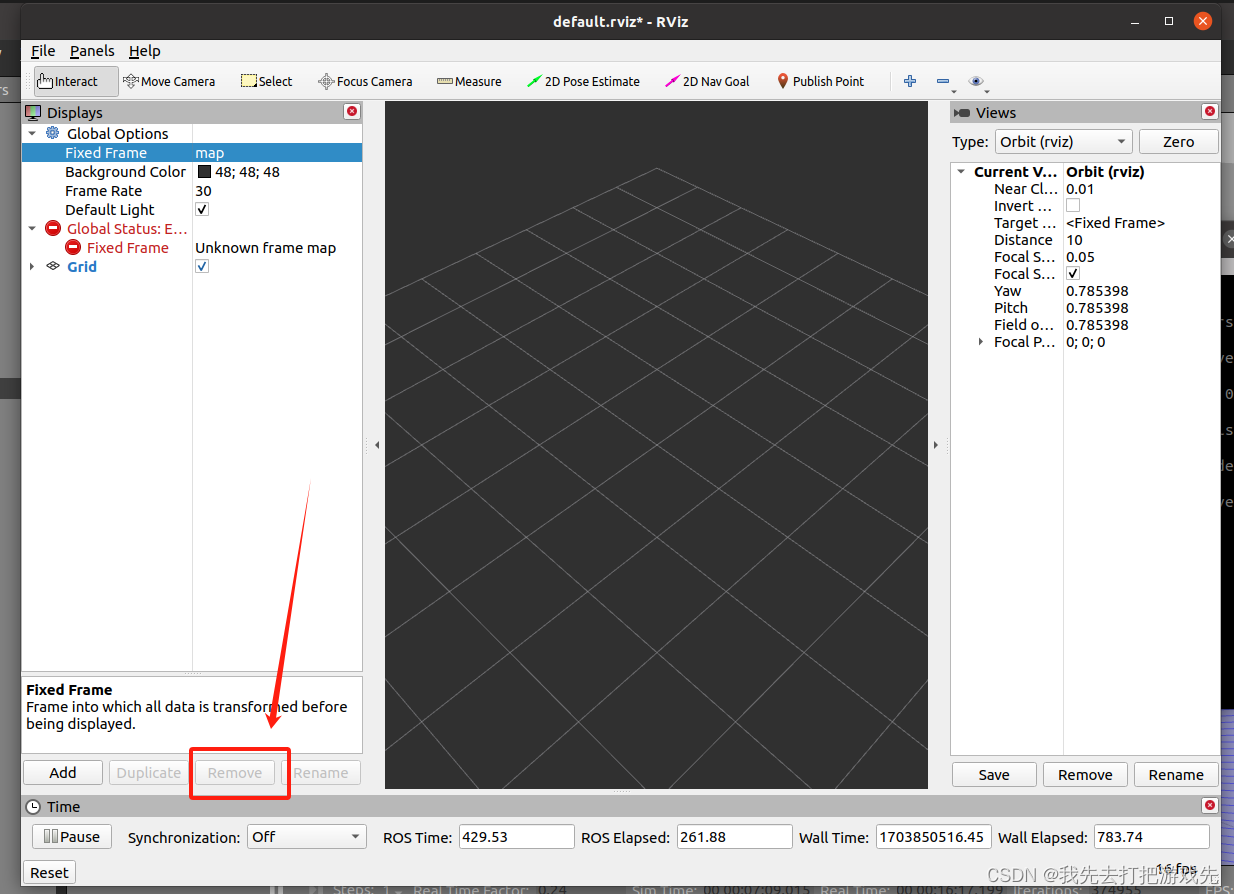
十六、这个是移除可视化项目按钮
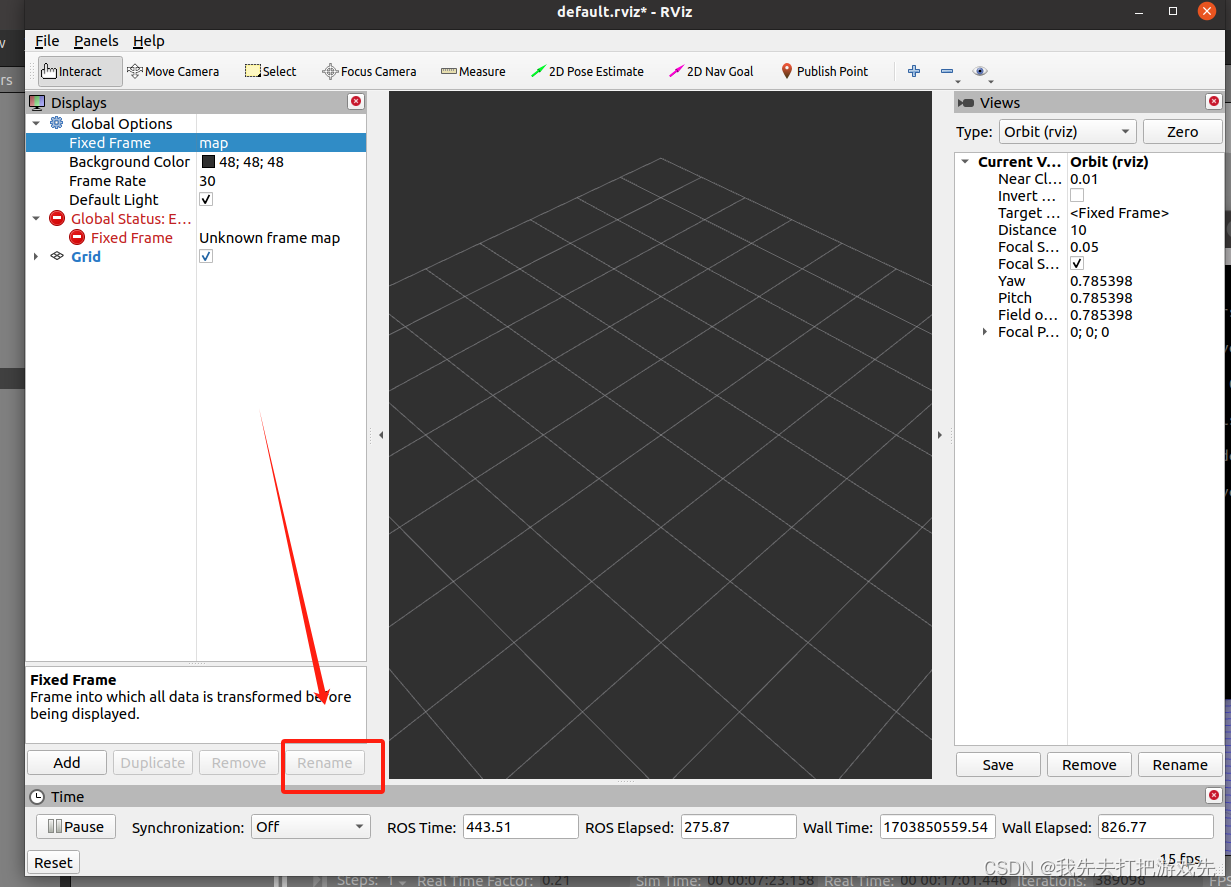
十七、这个是重命名可视化项目按钮
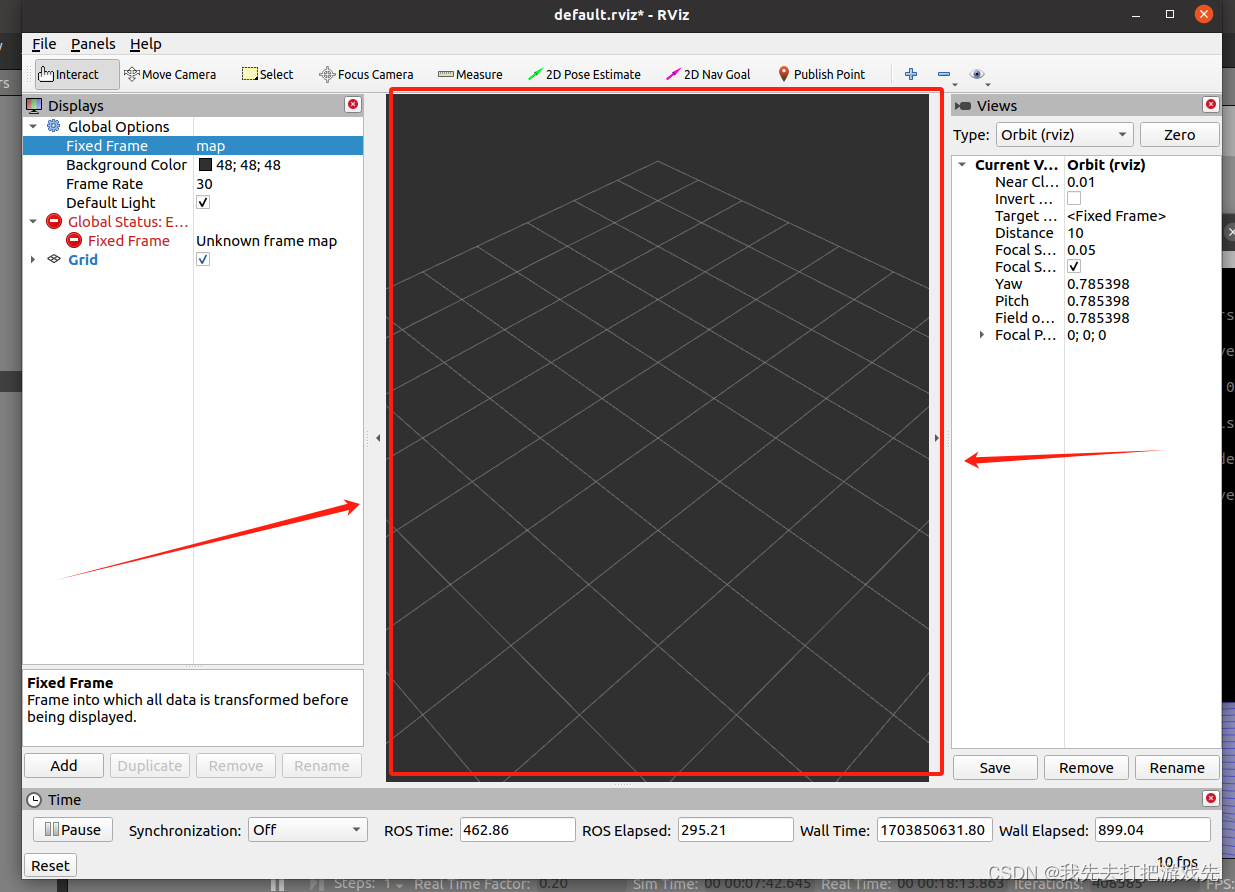
十八、RViz中间的区域是各种图形和图像显示的窗口,机器人和传感器数据都会显示在这个窗口里,这是一个三维显示窗口,我们现在看到的栅格,就是RViz为我们定义好的地面基准,也就是Z值为0的平面
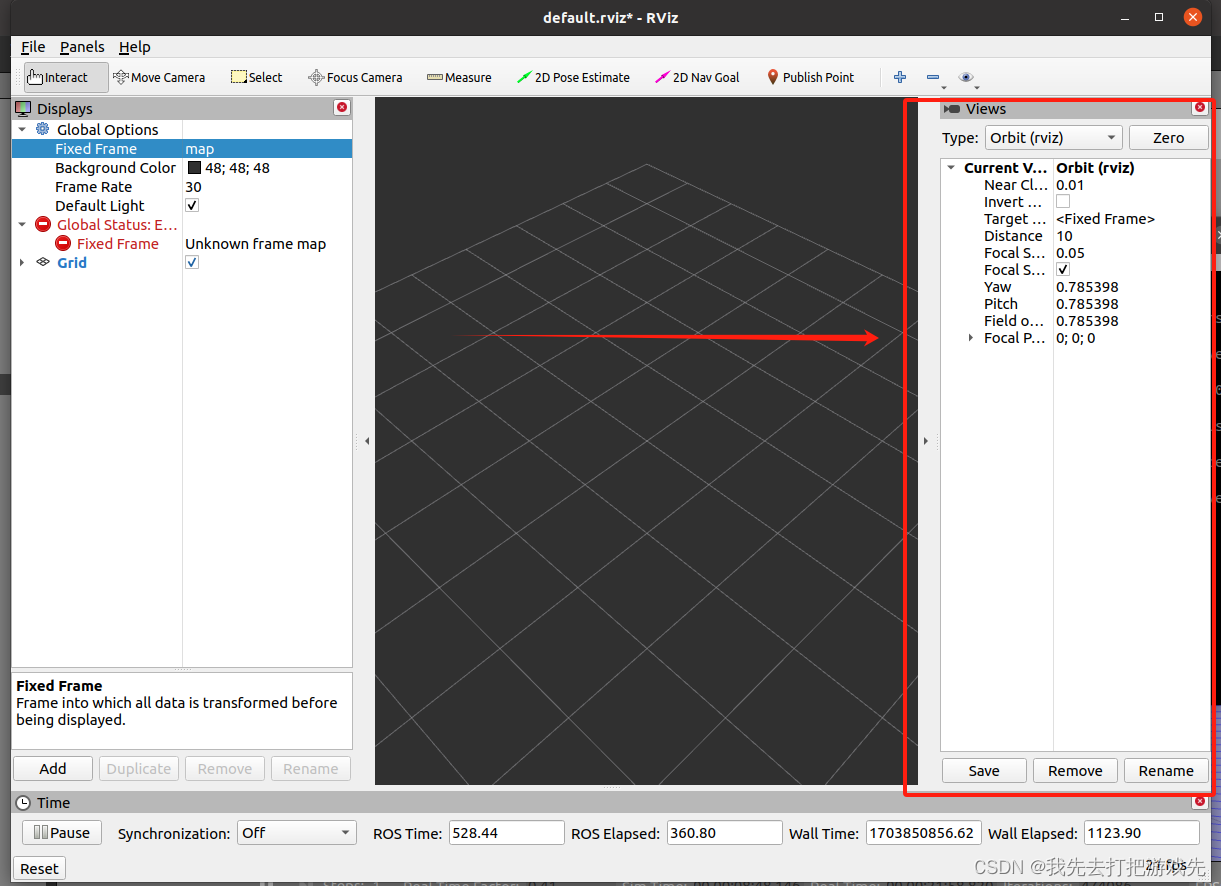
十九、这是对中间显示窗口的视角位置的数值进行调整的窗口,但是一般我们用鼠标拖动来调整视角,所以这个窗口很少用到
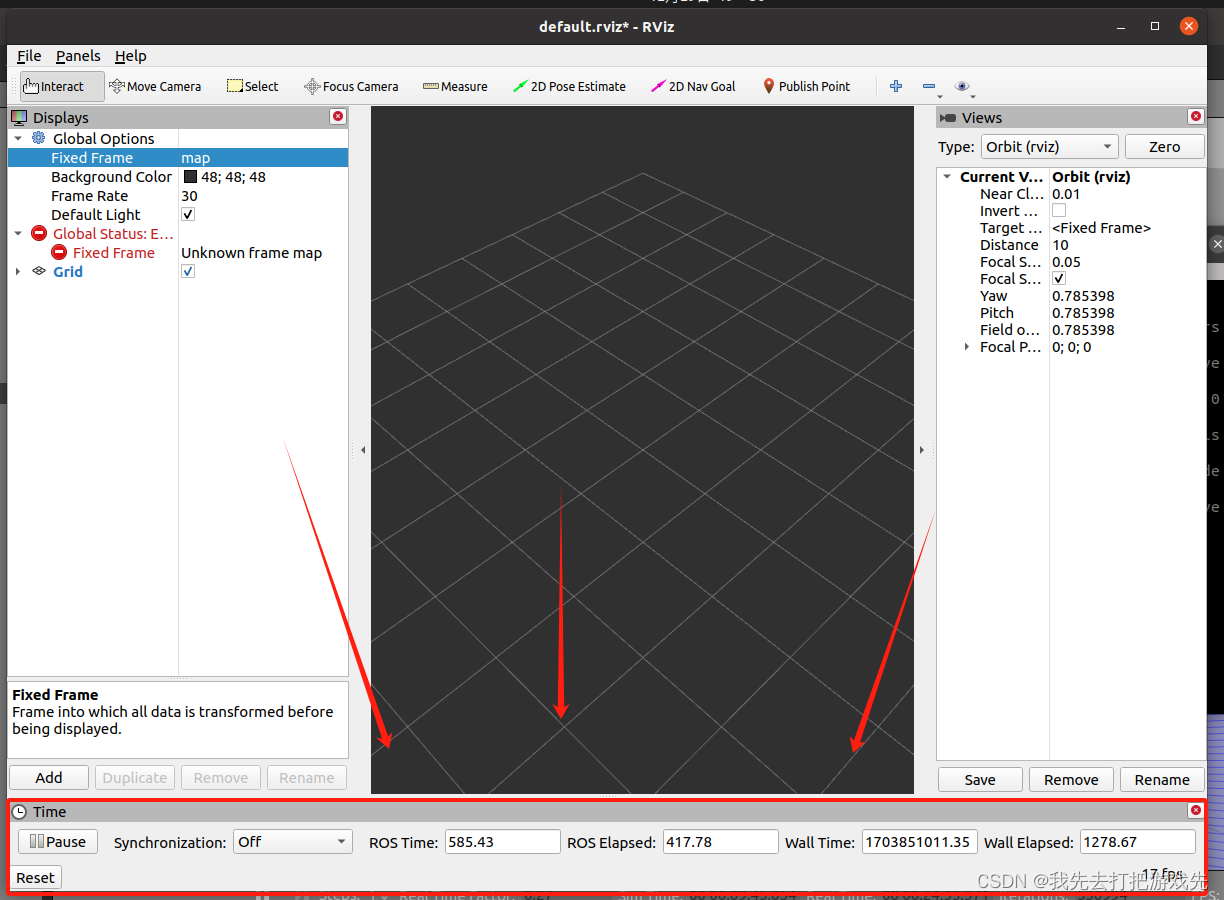
二十、这里是状态栏,主要显示的是ROS的一些状态数值,比如运行时间、鼠标操作的提示、三维渲染帧率等等
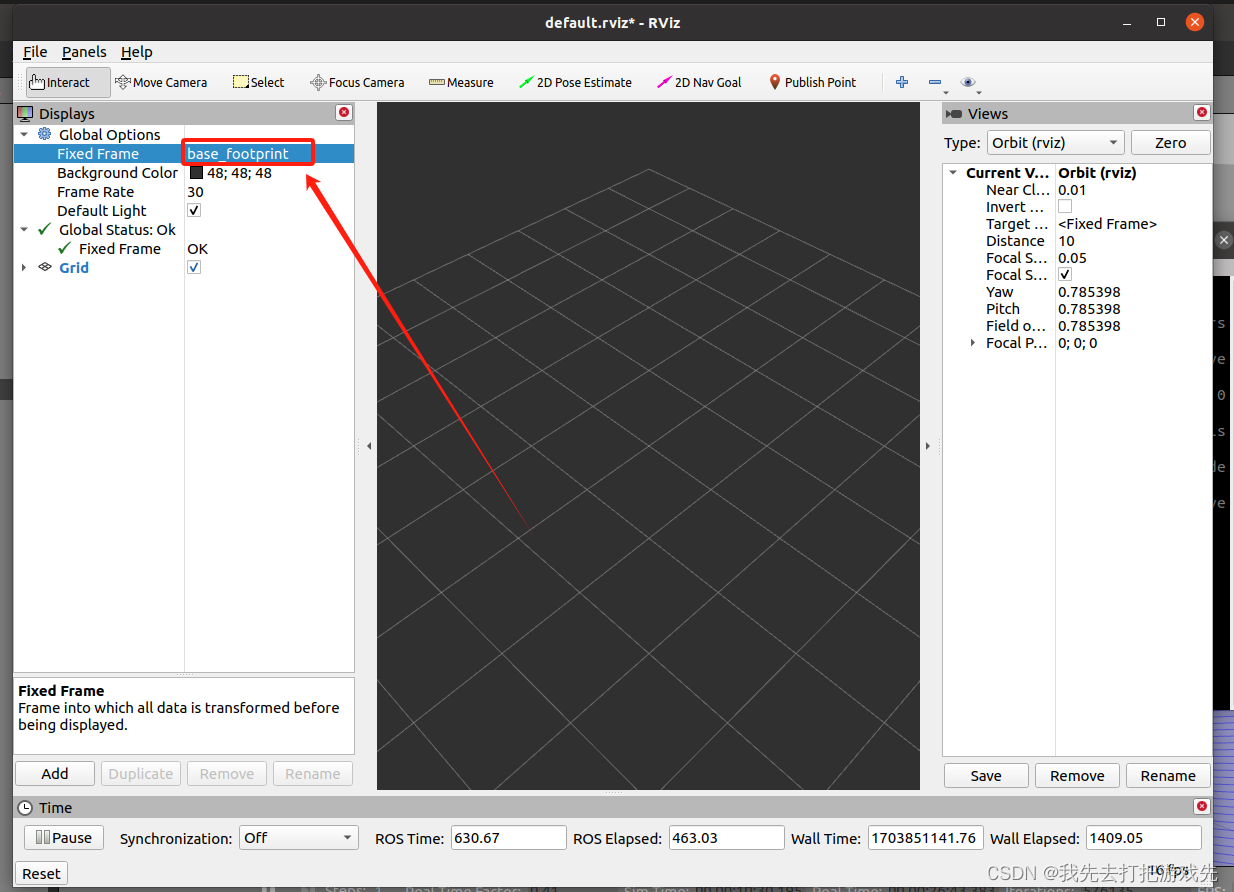
二十一、将Fixed Frame 修改成 base_footprint
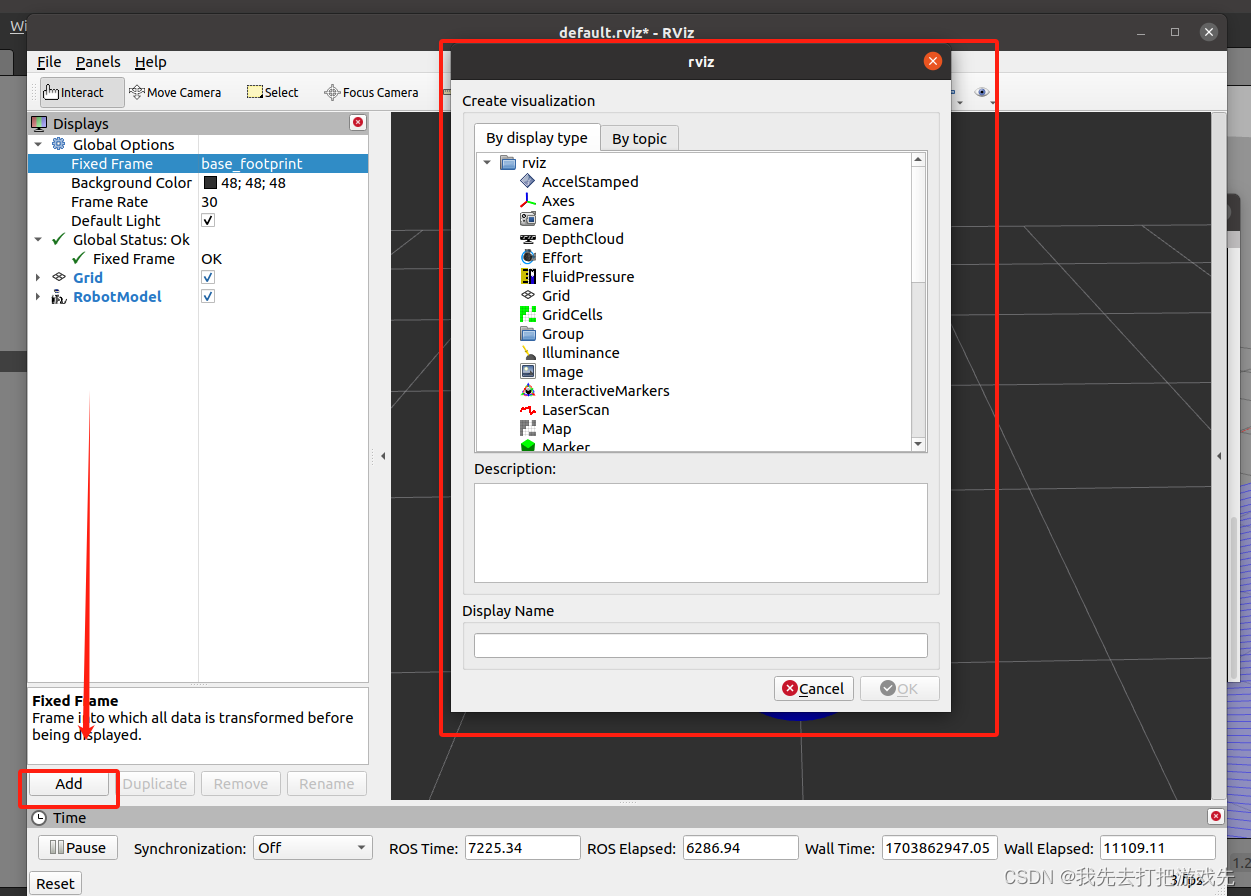
二十二、点击Add按钮,然后会弹出一个新窗口
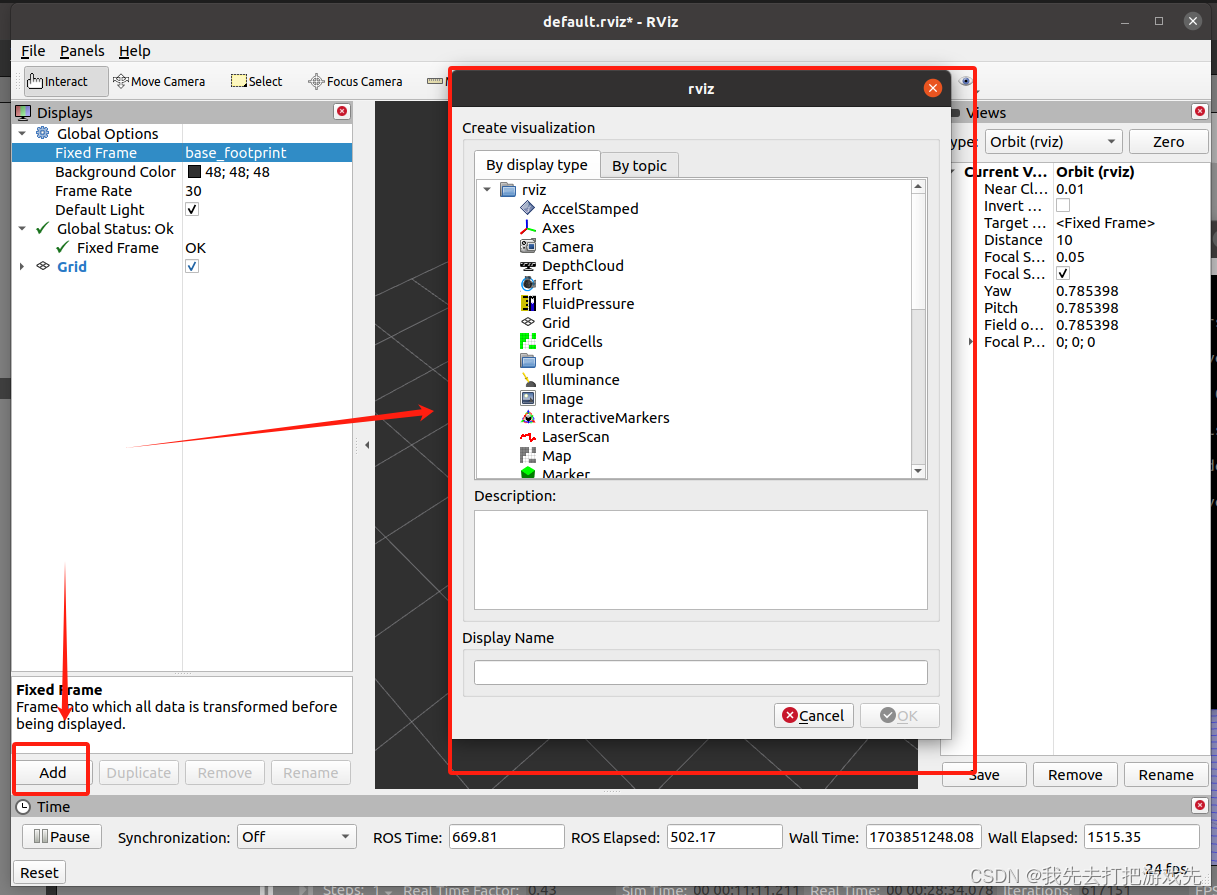
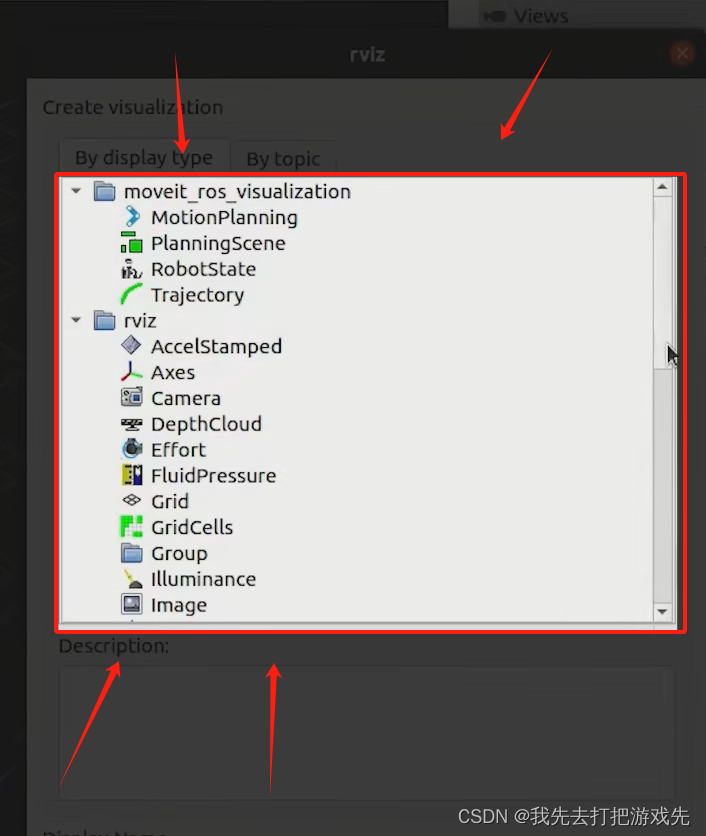
二十三、这一栏是RViz能显示的数据类型的列表
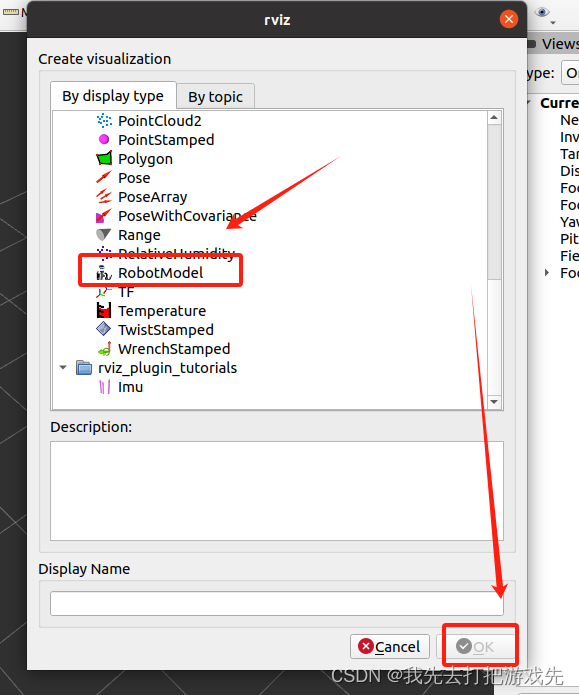
二十四、往下翻,找到RobotModel,选中它后点击OK
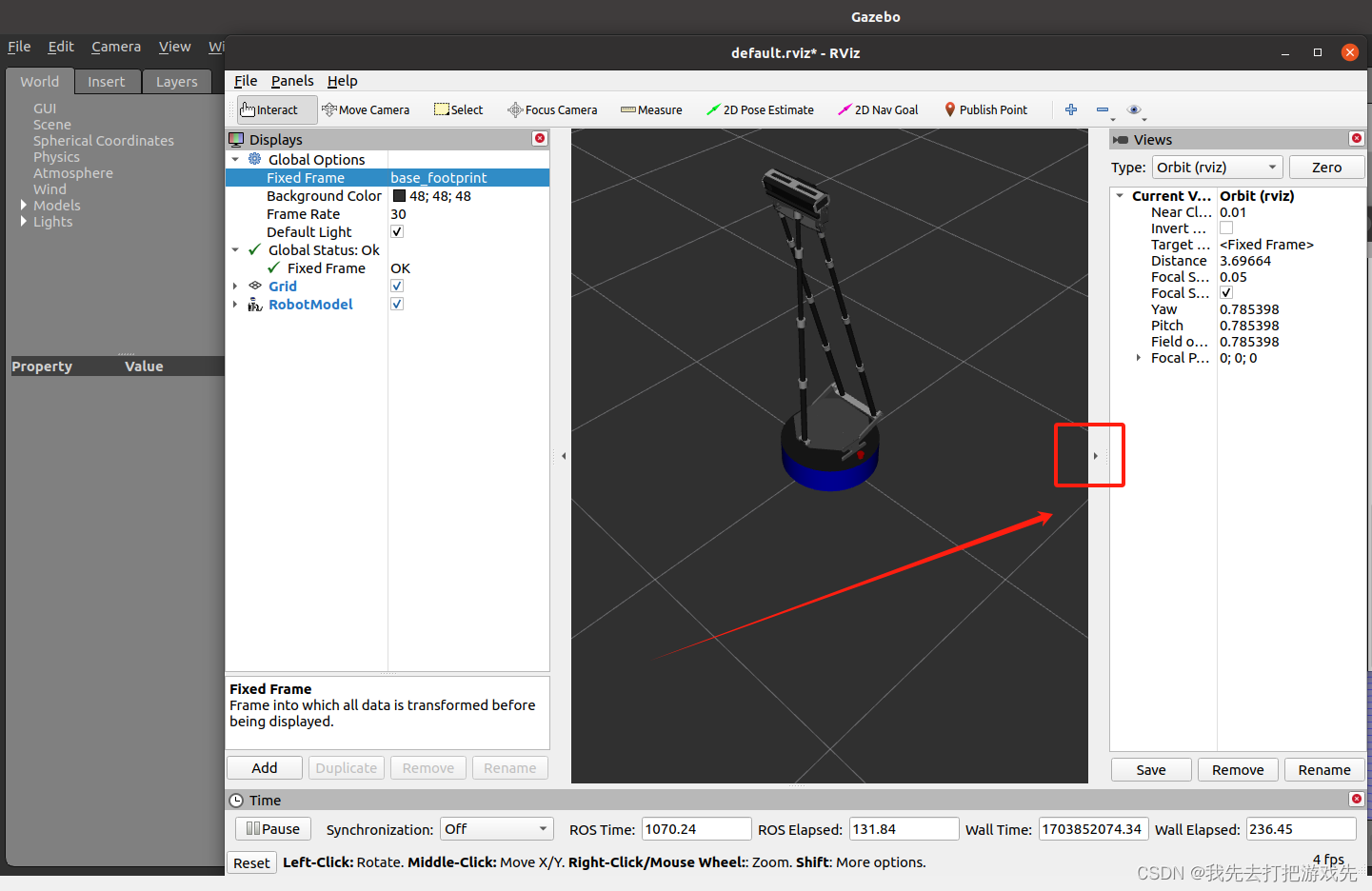
二十五、我们的机器人模型就出来了
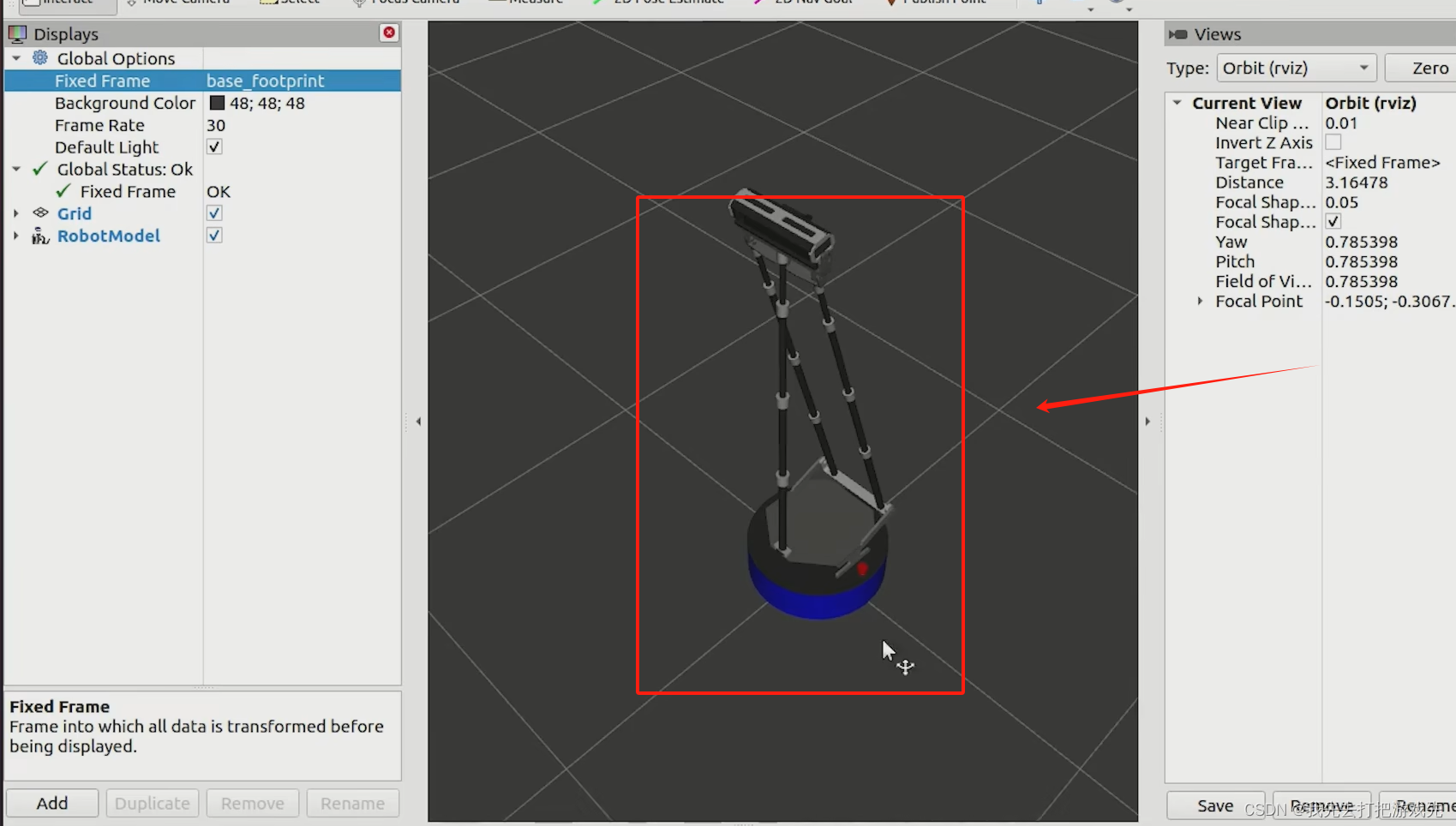
二十六、点击这里可以隐藏右边窗口
二十七、点击左下角Add添加一条激光雷达的显示条目
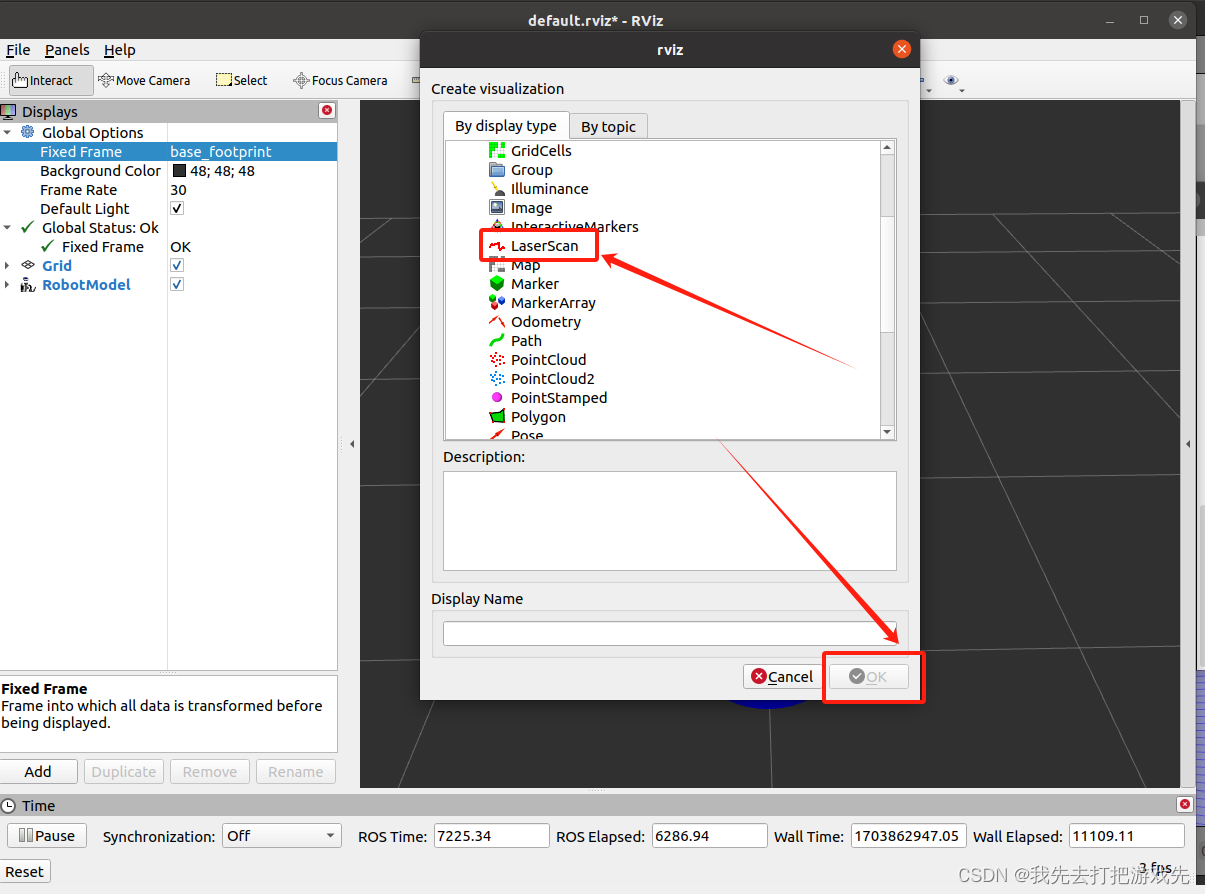
二十八、找到这个LaseScan选中后点击OK.
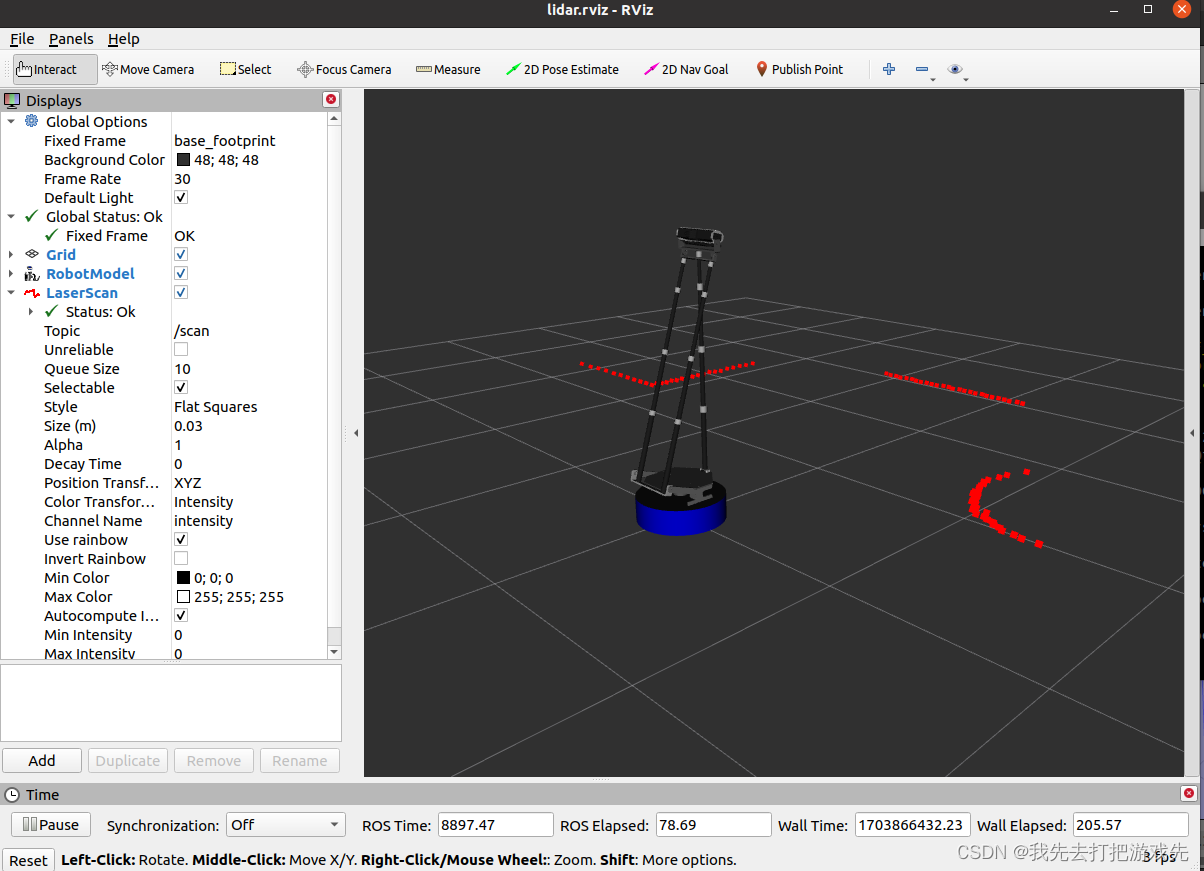
二十九、在Topic选着激光雷达的话题名称为/scan
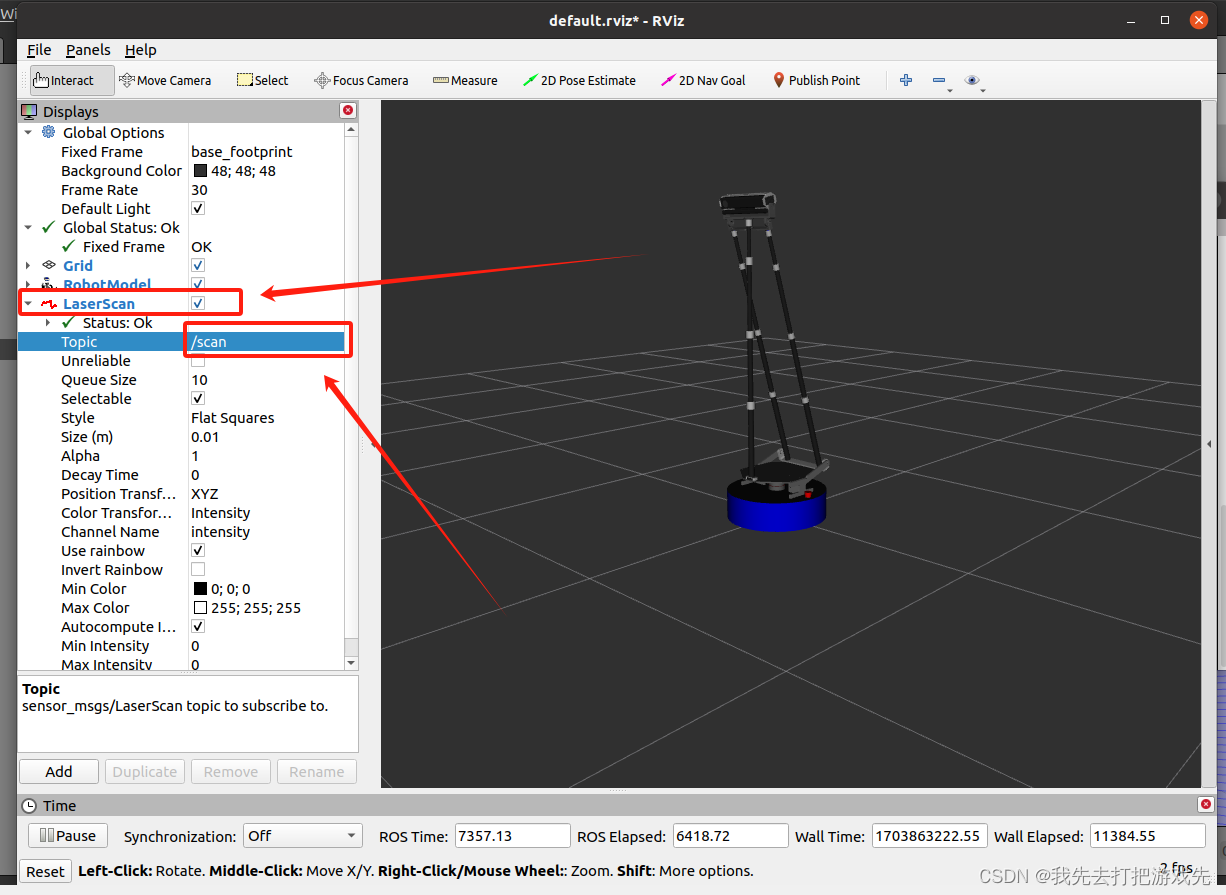
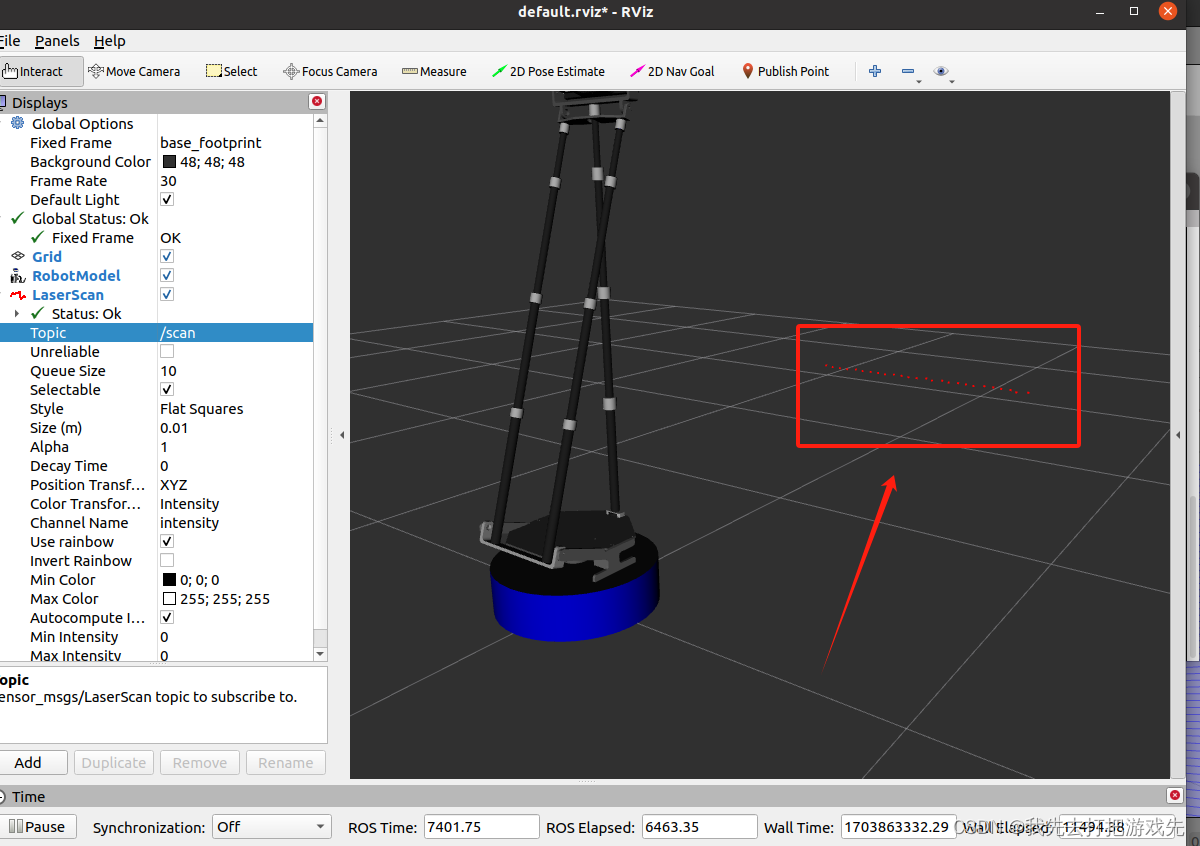
三十、可以看到机器人前方出现了一排细细的小红点
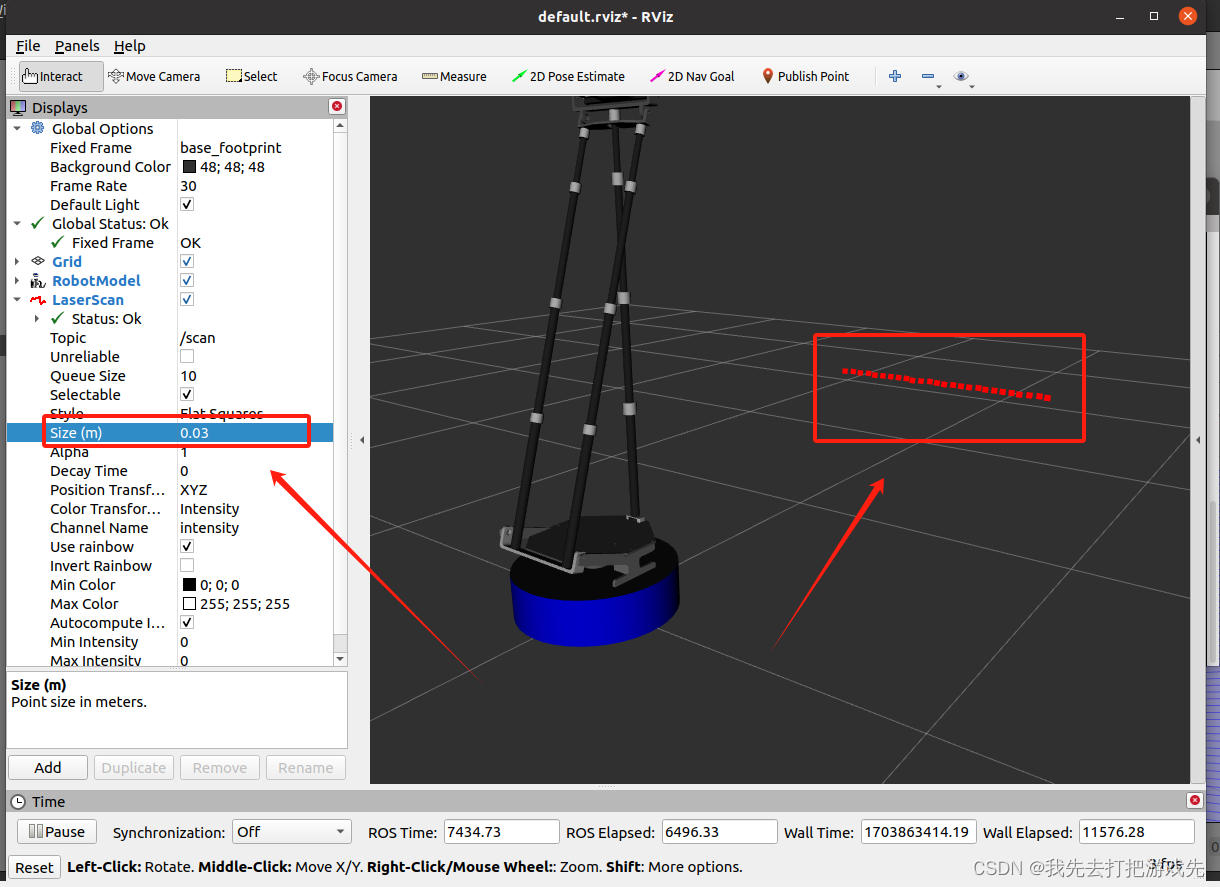
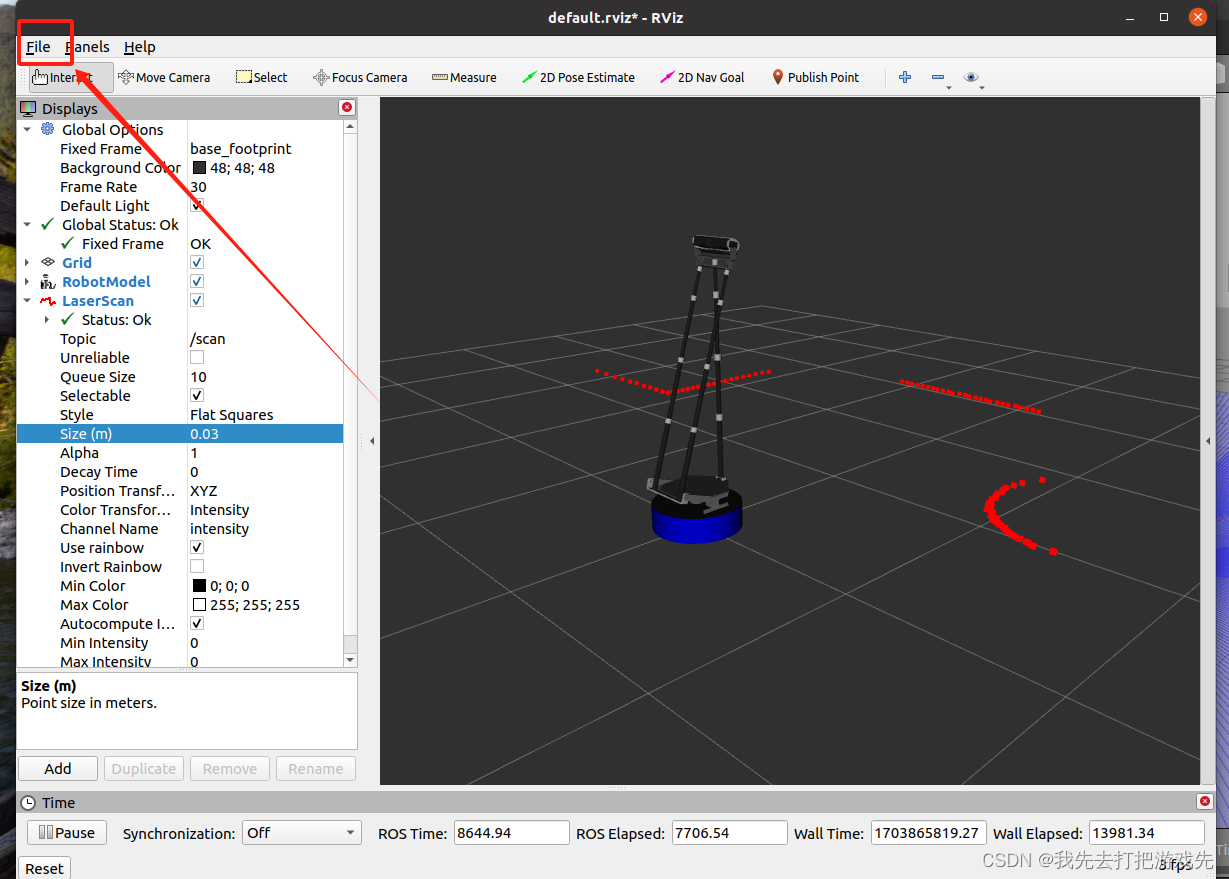
三十一、将Size改成0.03,这样小红点就变大了,我们观看更方便些
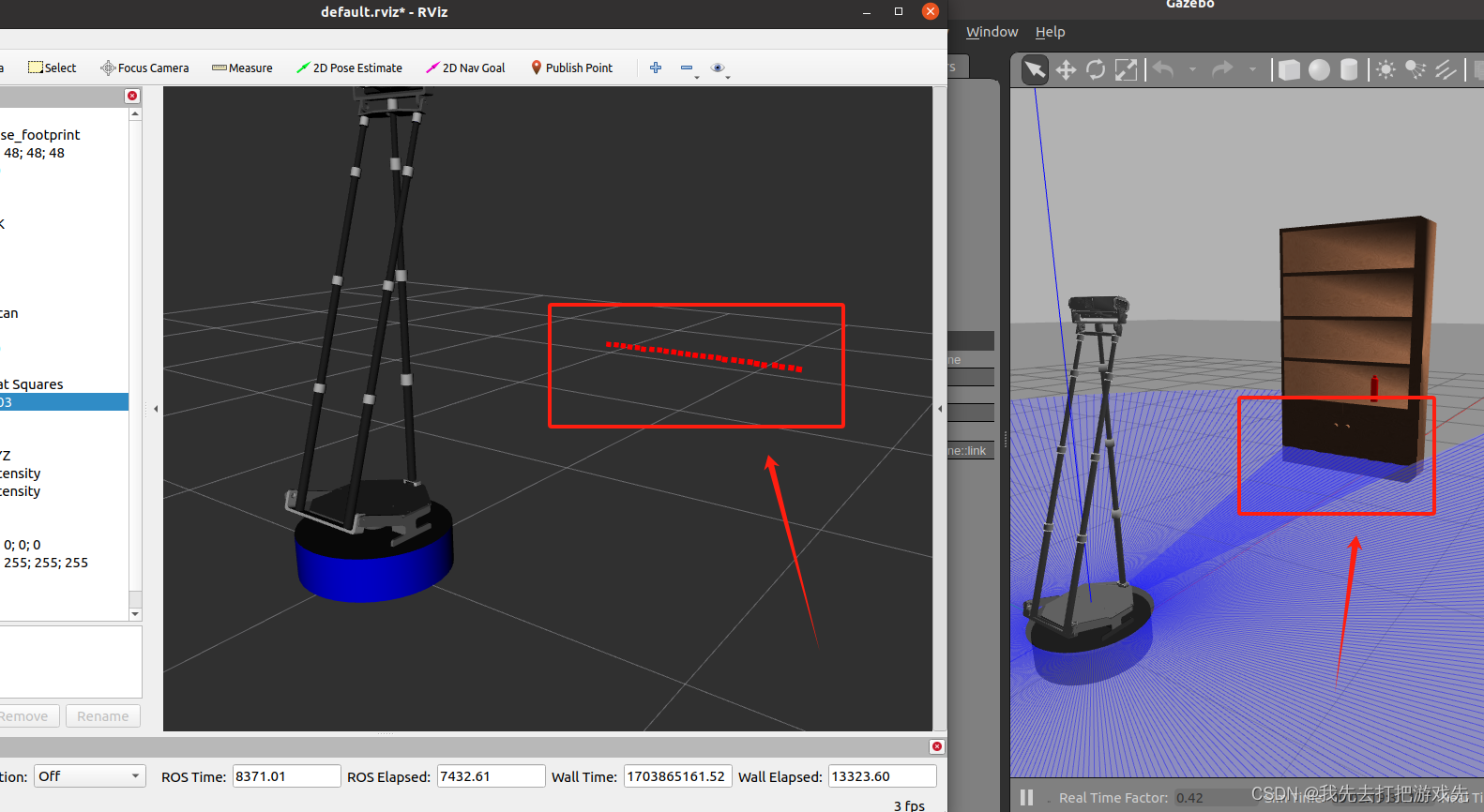
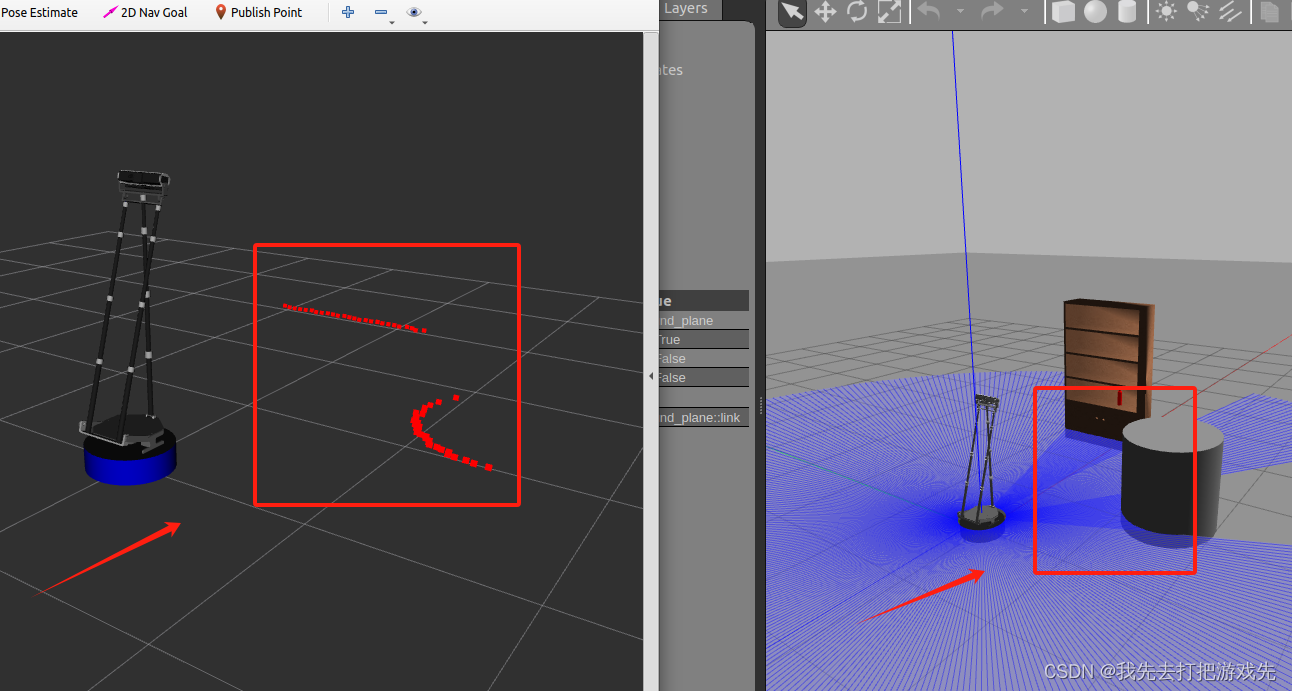
三十二、现在看到的是右侧Gazebo仿真机器人发送给左侧RViz显示的激光雷达数据
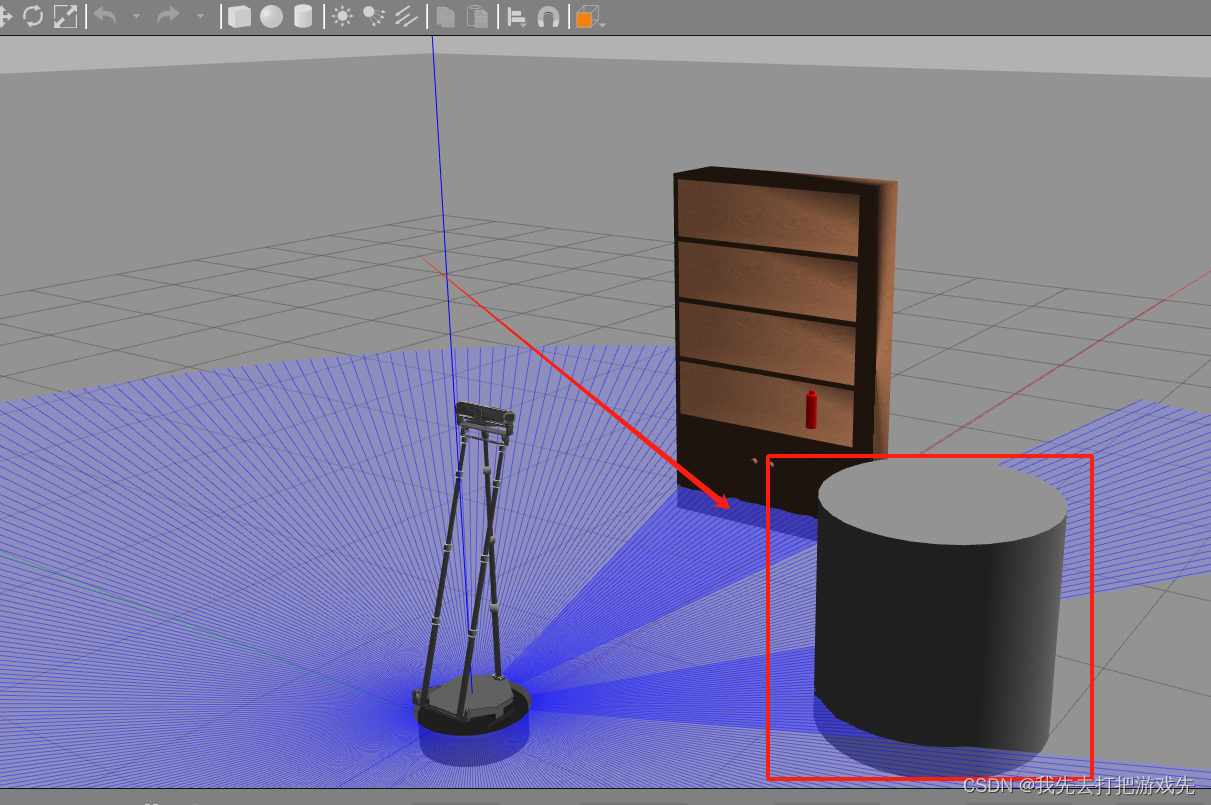
三十三、点击圆柱体
三十四、找个地方放置圆柱体
三十五、可以看到左侧RViz里同步显示出了圆柱轮廓的红色点阵
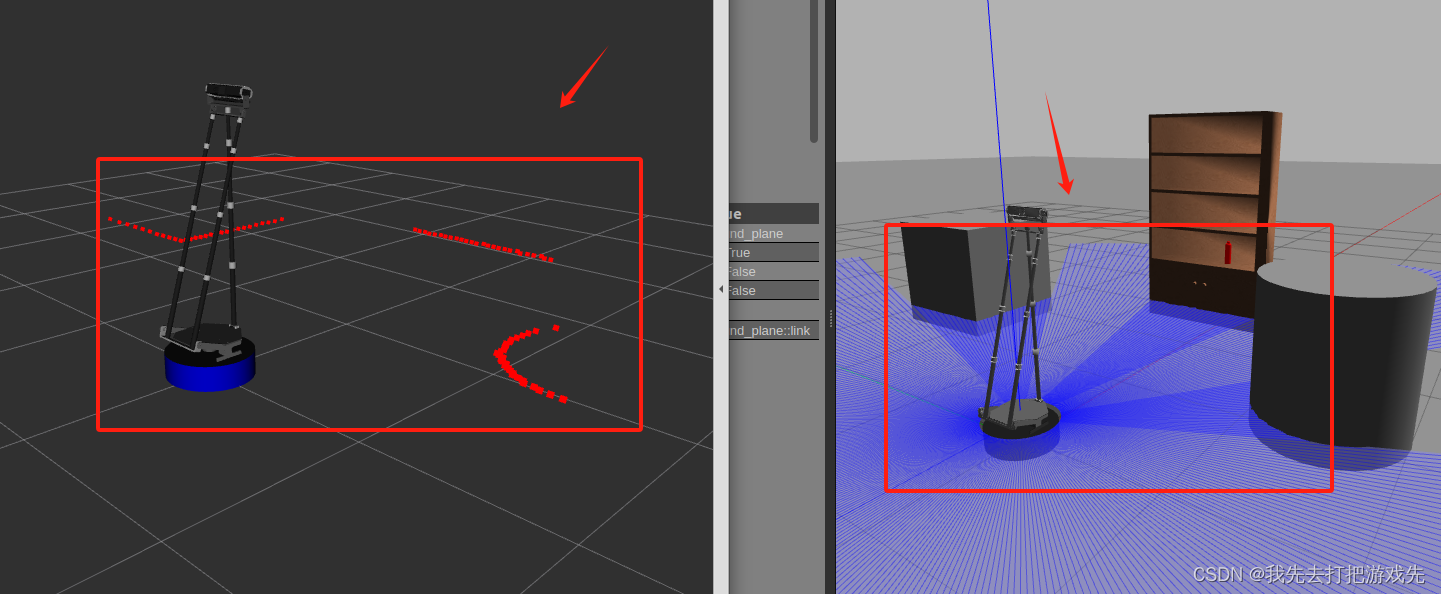
三十六、再来个立方体,也能同步显示
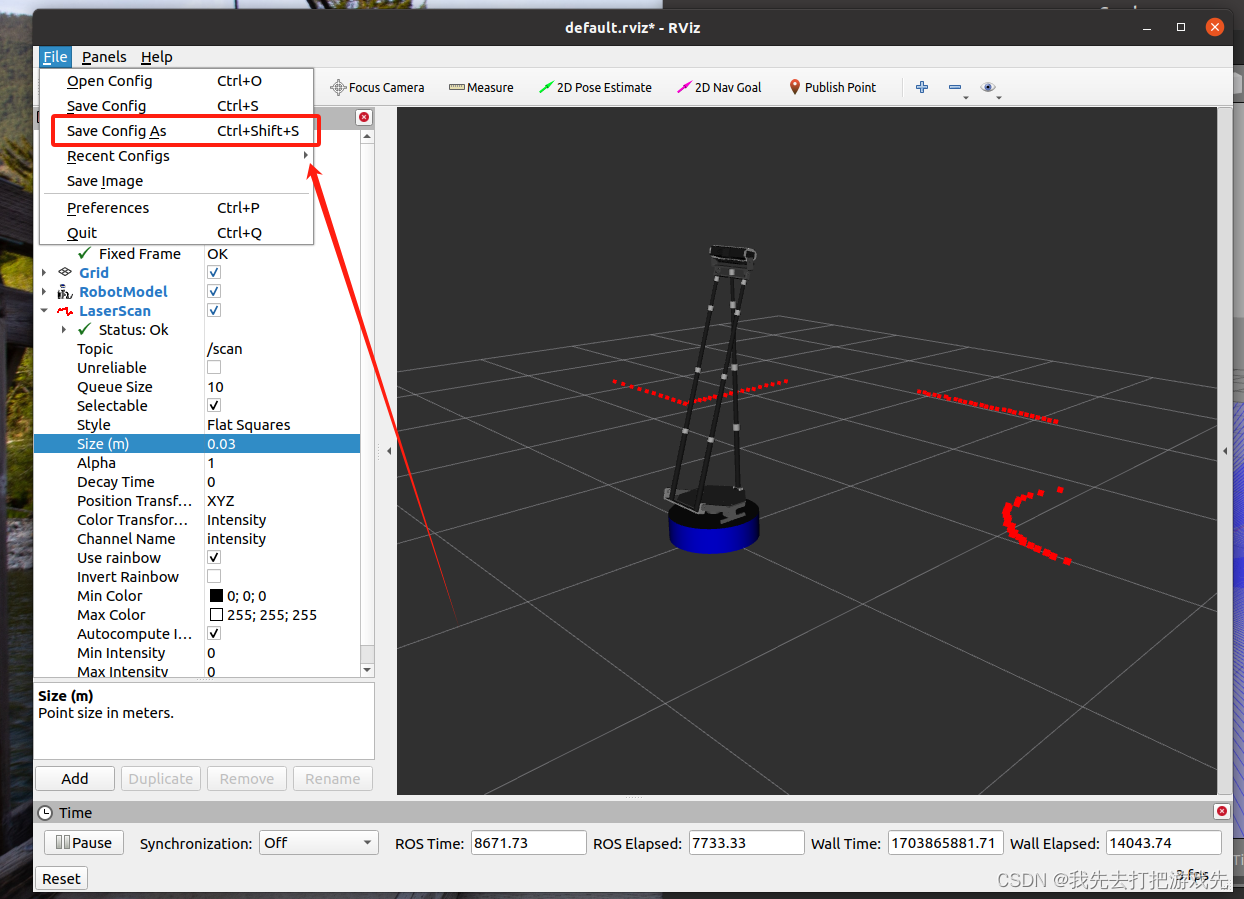
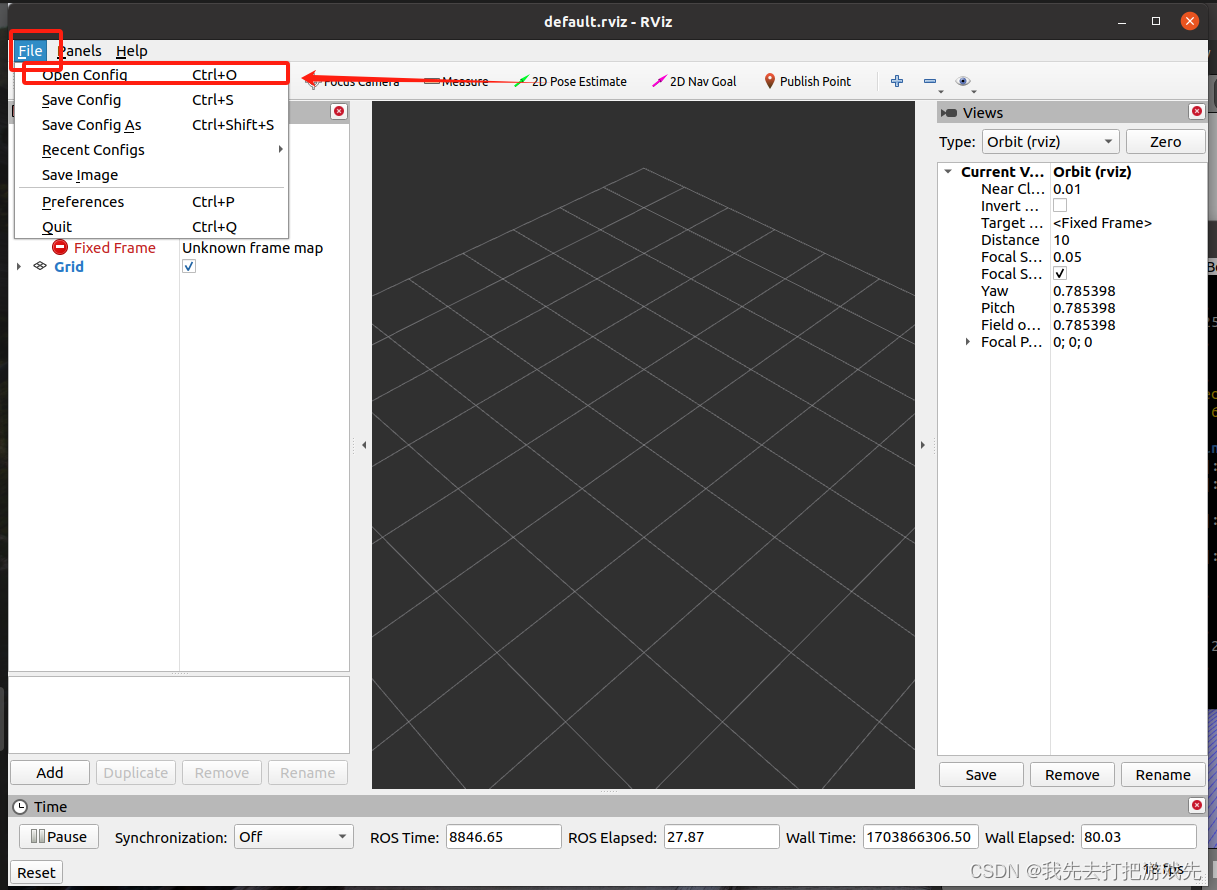
三十七、我们可以把RViz的当前配置保存下来,这样就不用每次都手动配置了,点击File菜单
三十八、选择Save Config As
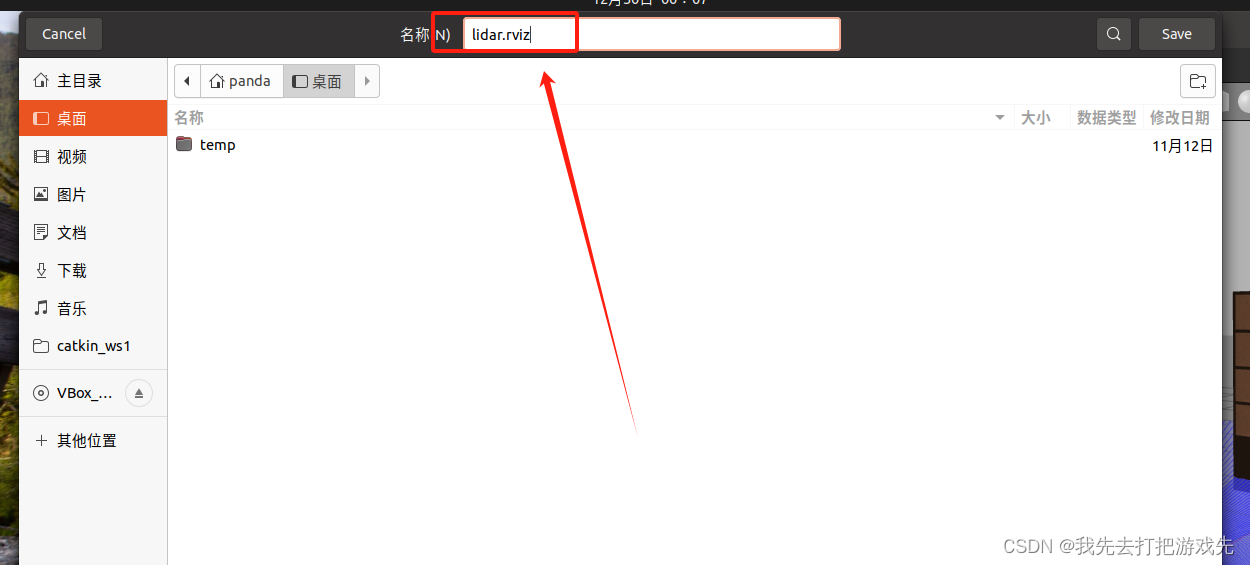
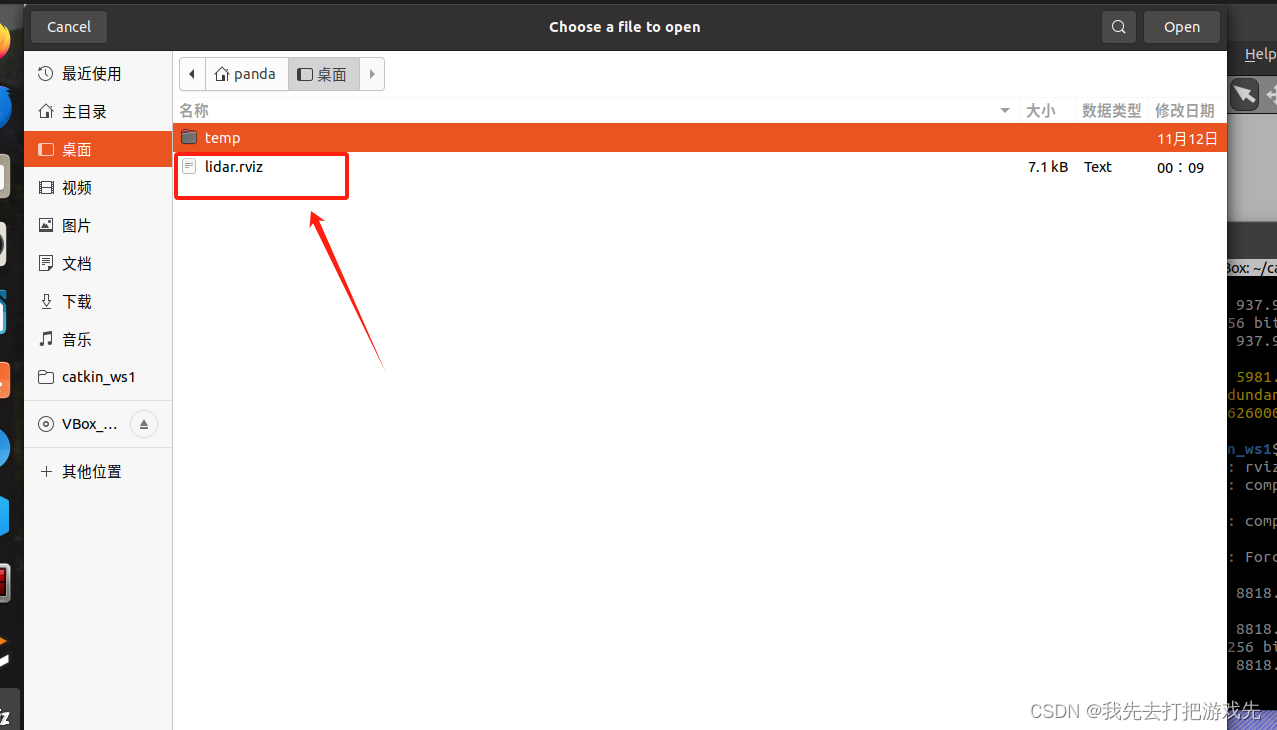
三十九、找个目录保存它,文件名为lidar.rviz,然后点击Save
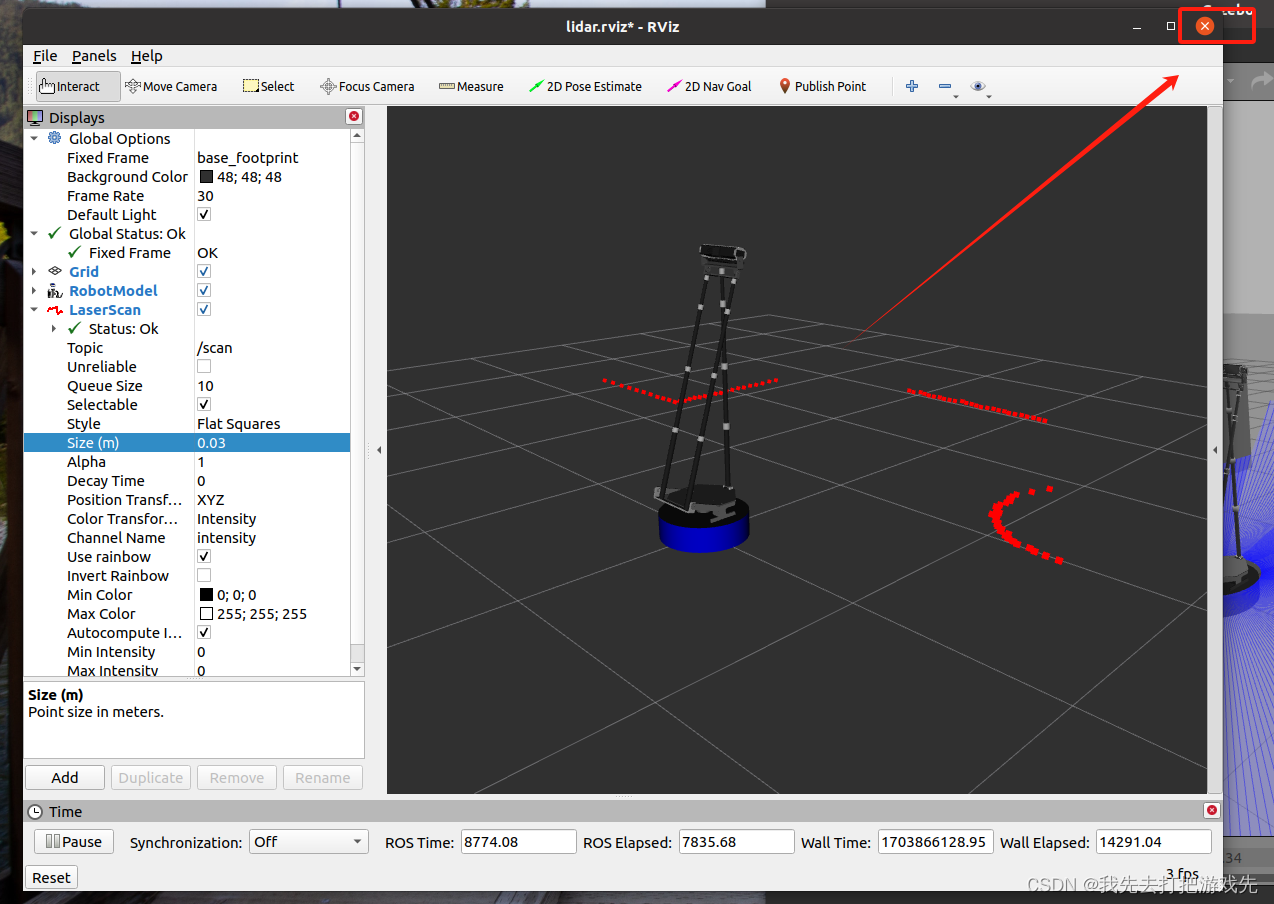
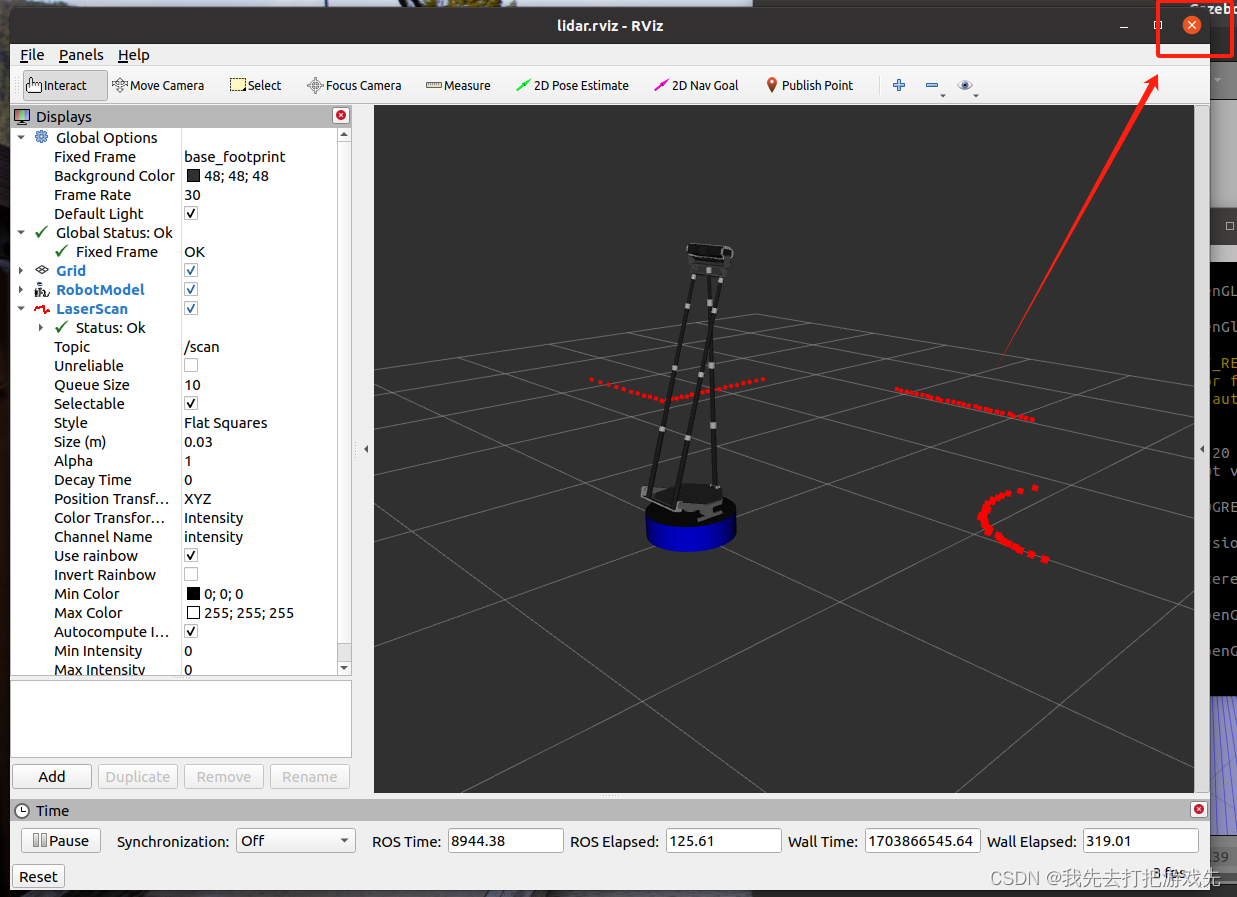
四十、我们把rviz关闭
四十一、然后再在终端输入rviz打开
四十二、点击Open Config
四十三、找到刚刚前面保存的文件进行打开
四十四、这样前面配置过参数就不用重新配了
四十五、关掉rviz
四十六、除了上述手动操作,还可以在launch文件里自动加载rviz配置文件,在终端中输入roslaunch wpr_simulation wpb_rviz.launch
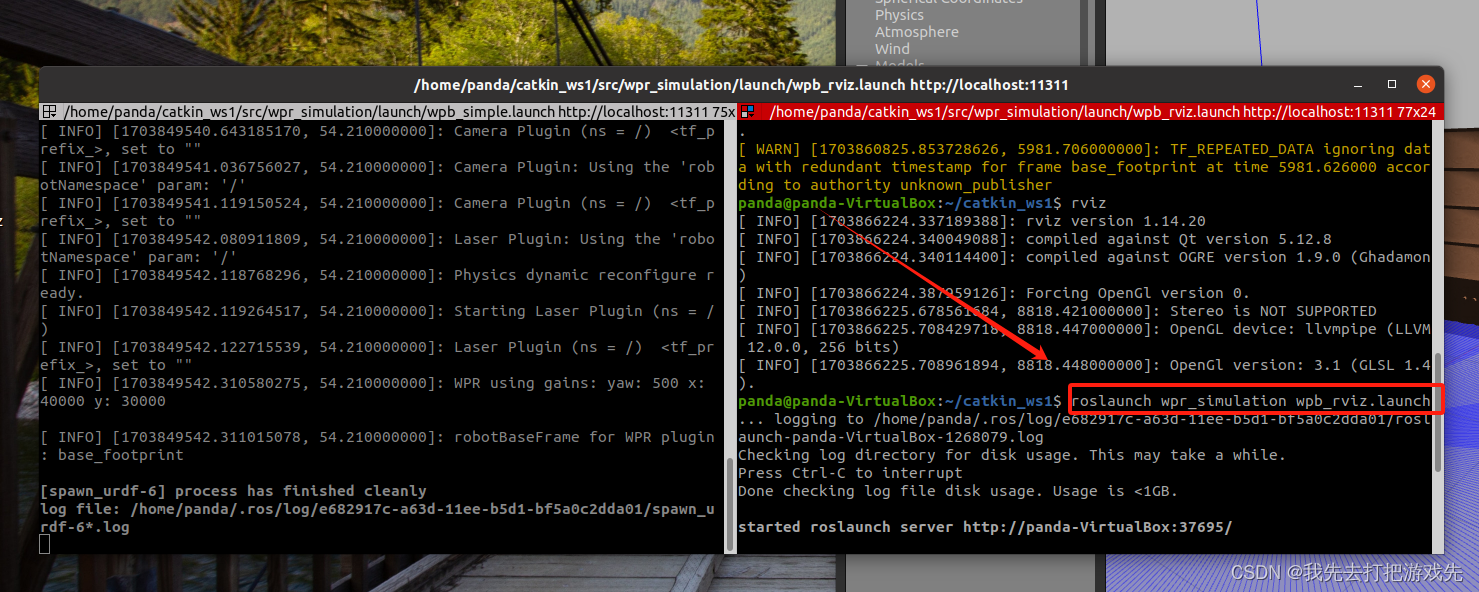
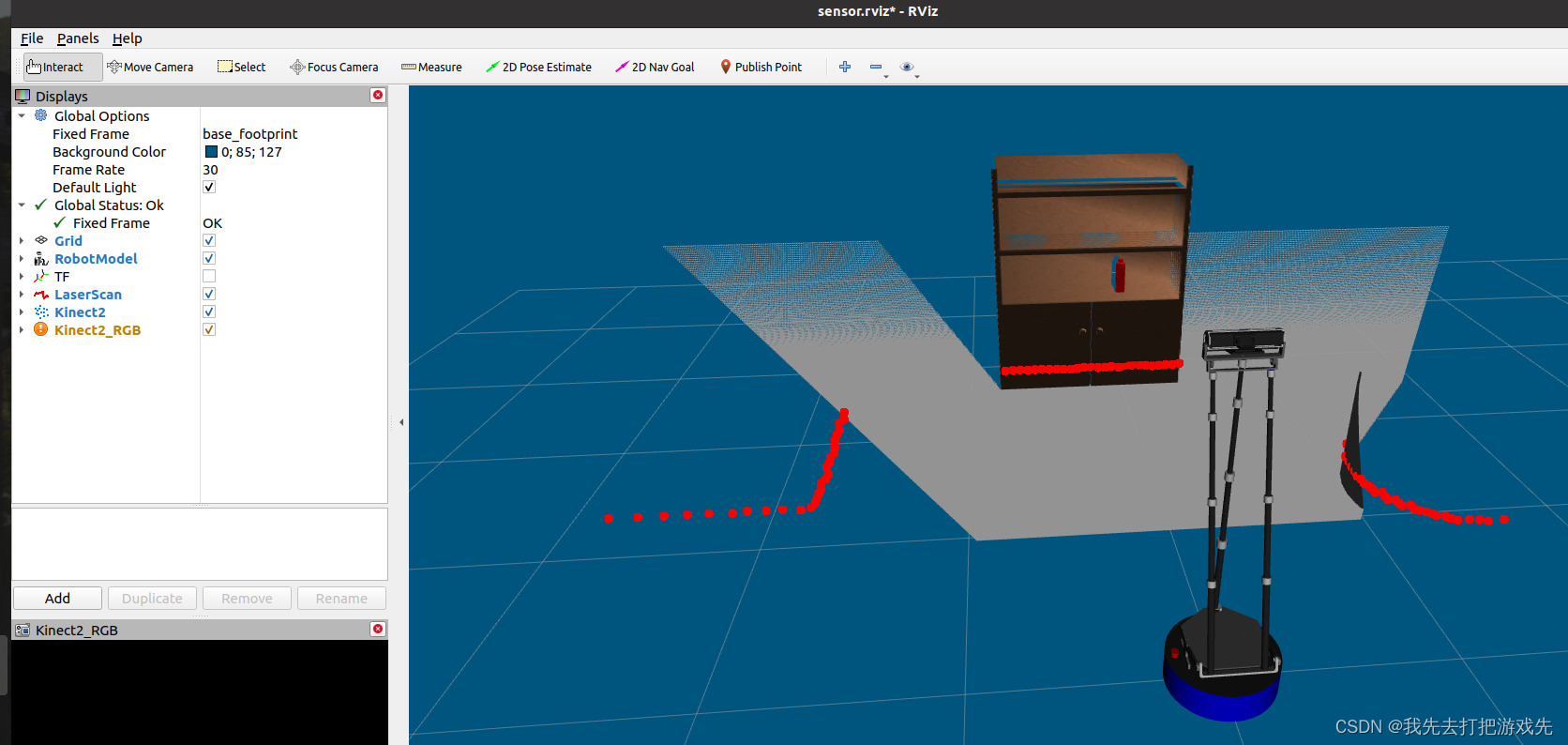
四十七、这就出现一个配置好的rviz界面
文章来源:https://blog.csdn.net/qq_52251819/article/details/135297371
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- 二分图的最大权匹配
- VT中使用27服务解锁的两种方法
- C/C++ 函数如何使用指针来处理数组
- K8S学习指南(10)-k8s中为pod分配CPU和内存资源
- 鸿蒙开发系列教程(一)--环境安装
- 力扣刷题记录(12)LeetCode:45、1005、135、860
- 嵌入式——RTC闹钟Alarm
- 自研基于Unitest与Pytest二次封装框架企业级项目实战(附项目源码下载)
- Python将txt转化为csv文件的pandas方法
- 【深度学习:数据增强】计算机视觉中数据增强的完整指南