yolov5旋转目标检测-遥感图像检测-无人机旋转目标检测-附代码和原理
发布时间:2023年12月28日
综述
为了解决旋转目标检测问题,研究者们提出了多种方法和算法。以下是一些常见的旋转目标检测方法:
- 基于滑动窗口的方法:在图像上以不同的尺度和角度滑动窗口,通过分类器判断窗口中是否存在目标。这种方法简单直观,但计算量大且效果依赖于窗口的尺度和角度设置。
- 基于特征提取的方法:利用图像特征提取技术,如SIFT、HOG、CNN等,获取目标的特征表示,再通过分类器进行目标检测。这种方法能够较好地处理目标的旋转变化,但对特征提取的准确性和鲁棒性有一定要求。
- 基于区域提取的方法:利用图像的局部区域信息进行目标检测,如Selective
Search、EdgeBoxes等。这种方法在目标的旋转变化下具有一定的鲁棒性,但对目标的形状和尺度变化敏感。 - 基于深度学习的方法:利用深度学习技术,如卷积神经网络(CNN)、循环神经网络(RNN)等,学习图像中目标的特征表示,并通过回归或分类模型实现目标检测。这种方法在旋转目标检测上取得了显著的效果提升,但需要大量的标注数据和计算资源。
简介
-
YOLOv5:YOLOv5是一种基于深度学习的目标检测算法,它采用了轻量级网络结构,具有较快的检测速度和较高的准确率。
-

-
旋转目标检测:传统的目标检测算法主要针对水平或垂直方向的目标,而在遥感图像和无人机应用中,目标常常以各种角度出现。因此,针对旋转目标的检测成为一个重要的研究方向。
-
遥感图像检测:遥感图像通常包含了大范围的地理信息,如建筑物、道路、农田等。利用YOLOv5进行遥感图像检测可以快速准确地识别出这些目标,从而帮助农业、城市规划等应用
-
无人机旋转目标检测:无人机在航拍过程中,由于姿态变化和目标运动,导致拍摄到的目标可能以各种角度存在。利用YOLOv5进行无人机旋转目标检测可以有效地识别出目标,并进行跟踪或其他后续处理。
-
数据集和训练:为了实现旋转目标检测,需要准备旋转目标的数据集,并对YOLOv5进行相应的调整和训练。数据集可以包含具有各种旋转角度的目标图像,并进行标注。
-
模型调优:针对旋转目标检测任务,可能需要对YOLOv5模型进行一些调优,例如增加网络层数、调整损失函数等,以提升检测准确率和鲁棒性。
代码安装
安装要求:
- Linux(建议使用);Windows(不建议使用,请参考此问题,如果您在生成utils/nms_rotated_ext.cpython-XX-XX-XX-XX.so方面遇到困难)
- Python 3.7+
- PyTorch ≥ 1.7
- CUDA 9.0或更高版本
我已经测试了以下操作系统和软件版本:
- 操作系统:Ubuntu 16.04/18.04
- CUDA:10.0/10.1/10.2/11.3
安装步骤:
a. 创建conda虚拟环境并激活,例如:
conda create -n Py39_Torch1.10_cu11.3 python=3.9 -y
source activate Py39_Torch1.10_cu11.3
b. 确保您的CUDA运行时API版本≤CUDA驱动程序版本。 (例如11.3 ≤ 11.4)
nvcc -V
nvidia-smi
c. 按照官方说明安装PyTorch和torchvision,确保cudatoolkit版本与CUDA运行时API版本相同,例如:
pip3 install torch==1.10.1+cu113 torchvision==0.11.2+cu113 torchaudio==0.10.1+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html
nvcc -V
python
import torch
torch.version.cuda
exit()
pip install -r requirements.txt
cd utils/nms_rotated
python setup.py develop #或"pip install -v -e ."
运行demo
Usage:
$ python path/to/detect.py --weights yolov5_rotate.pt --source 0 # webcam
img.jpg # image
vid.mp4 # video
path/ # directory
path/*.jpg # glob
'https://youtu.be/Zgi9g1ksQHc' # YouTube
'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
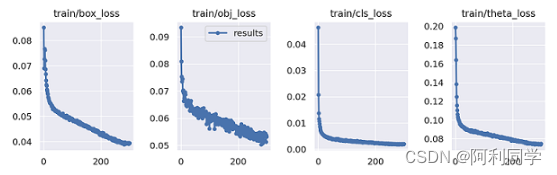
结果展示

结论
选择毕业设计课题需要考虑以下几个因素:
- 兴趣和专业方向:选择自己感兴趣并且符合自己专业方向的课题,可以让你更加投入和热情地完成毕业设计,并提升自己相关领域的技能。
- 实用性和社会需求:选择具有实用性和社会需求的课题,可以使你的毕业设计有更大的实际意义和应用前景。
- 研究难度和可行性:选择既有一定的研究难度,但又具备可行性和实现可能性的课题,可以保证你能够完成毕业设计,并取得较好的成果。
代码获取、论文指导、作业帮助、毕设达标——qq1309399183
- 资源和指导教师:选择具有充足资源和提供指导支持的课题,可以让你在毕业设计中得到更好的实践和研究经验,并且顺利完成毕业设计
文章来源:https://blog.csdn.net/ALiLiLiYa/article/details/135274751
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- const的基础用法
- 太强了!MySQL、Oracle、PostgreSQL 数据库备份拿来就用的 Shell 脚本!
- LINUX——动/静态库
- php中常用的几个安全函数
- 【Qt之模型视图】3. 视图类及使用
- Vulnhub靶机:FunBox 5
- 基于SpringBoot的教学辅助系统
- CPU算力分配 - 华为OD统一考试
- Postman接口自动化测试之——批量执行(集合操作)
- 销售升级:电话机器人、电销、外呼、回拨打造高效转化链!