基于机器视觉的车牌检测-边缘检测因子的选择
发布时间:2024年01月07日
车牌检测概述
车牌识别在检测报警、汽车出入登记、交通违法违章以及移动电子警察方面应用广泛。车牌识别过程为:首先通过摄像头获取包含车牌的彩色图像;然后进行车牌边缘检测,先粗略定位到车牌位置,再精细定位;最后根据我国车牌的样式,第一个汉字代表省份,第二个大写英文字母是代表地市,后面5个数字与字母混合,利用字符分割和模板匹配实现车牌识别。
边缘检测因子的选择
边缘检测算子有Sobel、Prewitt、Canny算子的特点
Sobel 算子是主要利用边缘检测的一阶导数算子计算图像灰度函数的近似梯度,在图像的任何一点使用此算子,将会产生对应的梯度。
Prewitt算子具有噪声抑制的优势。由于该算子中引入了类似局部平均的运算方式,因此对噪声具有平滑作用,能在一定程度上消除噪声的影响并去掉部分伪边缘。
Sobel、Prewitt等算子存在以下两点不足:第一,没有充分利用边缘的梯度方向;第二,二值图仅通过简单的单阈值处理得到。
Canny 边缘检测在噪声抑制和边缘检测之间寻求较好的平衡,表达式近似于高斯函数的一阶导数。Canny 边缘检测算子对加性噪声的边缘检测为最优。

a)原图 b) 高斯滤波后图像 c)梯度处理后的图像d)非极大值抑制方法处理后图像 e)边缘检测结果?
车牌识别原理?
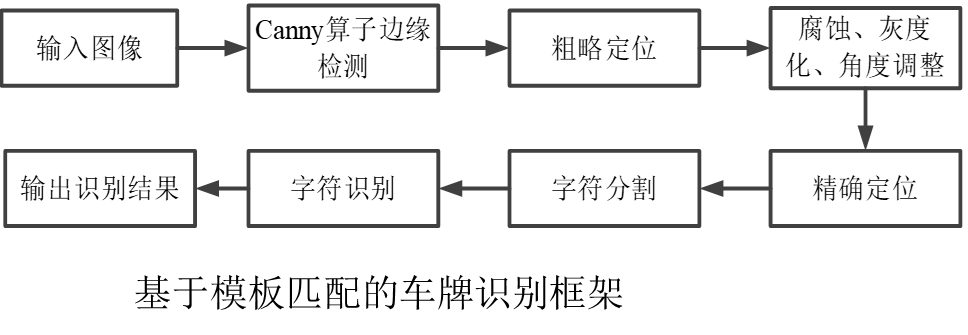
在车牌识别过程中,先对车牌进行Canny算子边缘检测、粗略定位的腐蚀与灰度化、精确定位字符,对分割后的字符进行模板匹配,最后识别出车牌号。其中主要包括五大内容:边缘检测算子的选择、粗略定位、车牌图像倾斜矫正、字符分割方法以及字符识别。
文章来源:https://blog.csdn.net/qq_20660115/article/details/135444344
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Python+Requests+PyTest+Excel+Allure 接口自动化测试实战
- 【Java】转义字符
- XTdrone运行ego需打开多个终端 麻烦 一键启动脚本
- 程序员必备的数据库知识 2:Join 算法
- 插入排序:直接插入排序 希尔排序
- 第五章、控制语句
- html中的form表单以及相关控件input、文本域、下拉select等等的详细解释 ,点赞加关注持续更新~
- 全景叙事定位 Towards Real-Time Panoptic Narrative Grounding by an End-to-End Grounding Network 论文阅读笔记
- 【无标题】
- 机器学习算法(12) — 集成技术(Boosting — Xgboost 分类)