[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4
发布时间:2024年01月19日
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-3+4
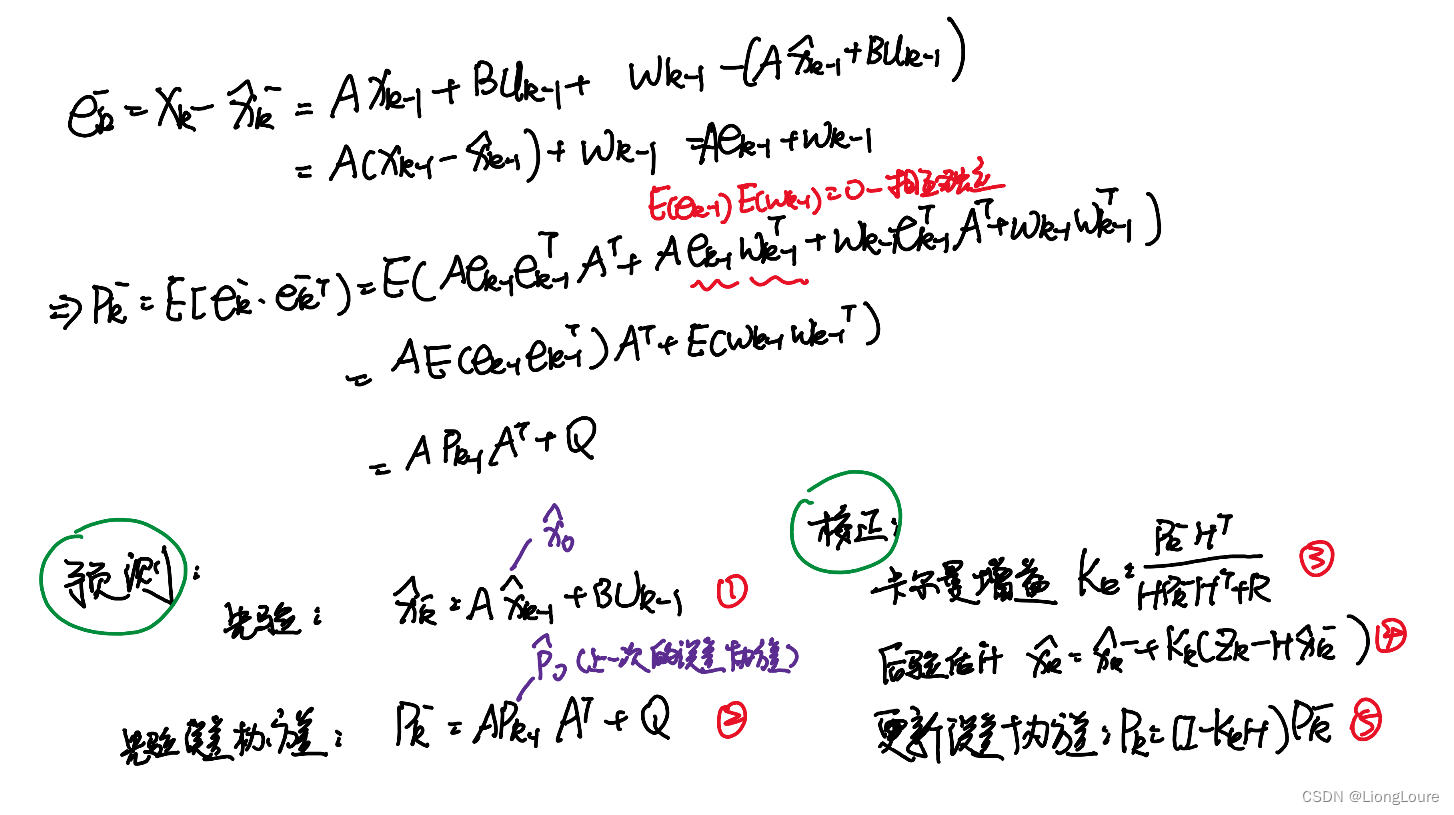
3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
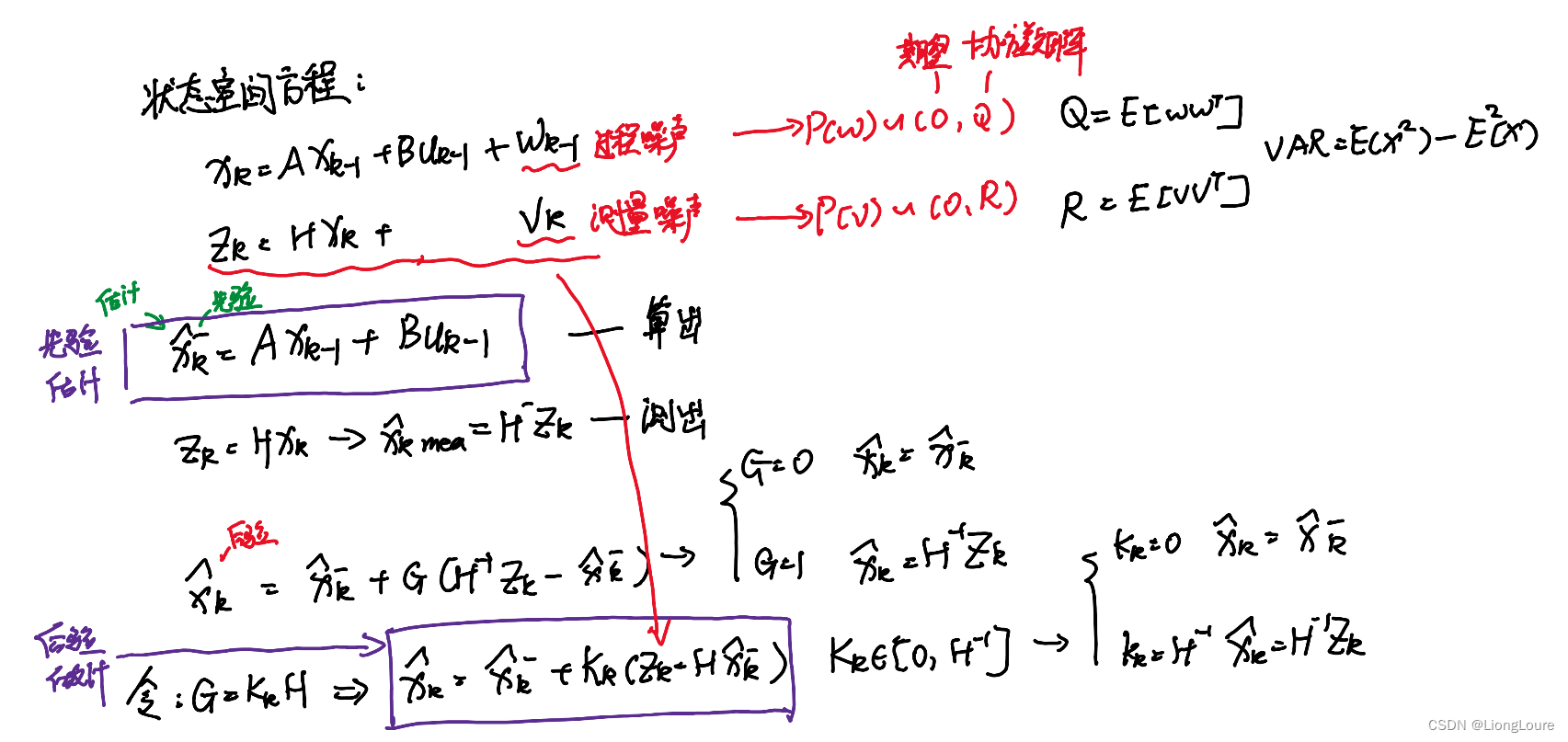
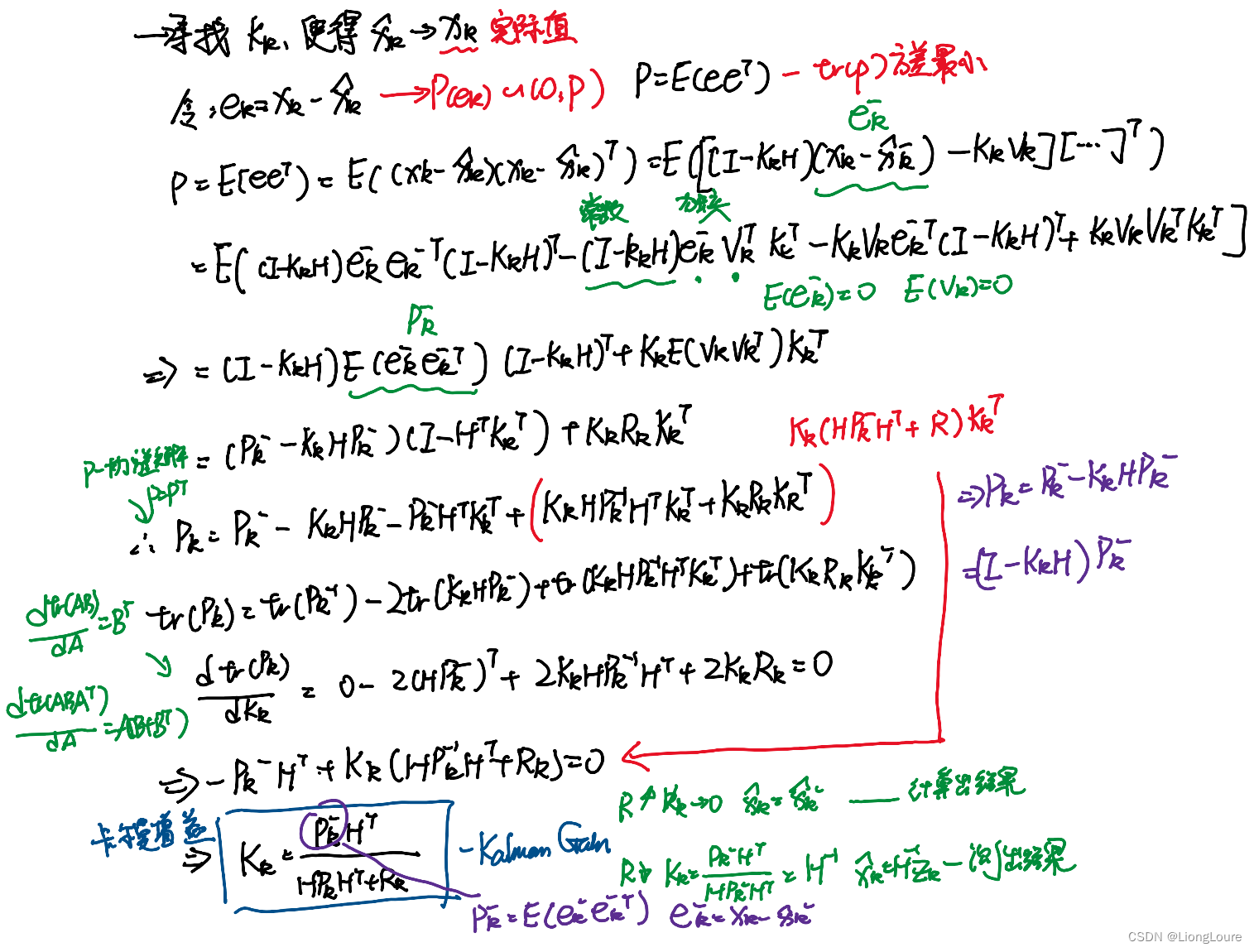
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
文章来源:https://blog.csdn.net/LiongLoure/article/details/135670752
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章