数据结构学习笔记(八)图
文章目录
1. 前言
本系列笔记基于 清华大学出版社的《数据结构:用面向对象方法与C++语言描述》第二版进行学习。
2. 概念
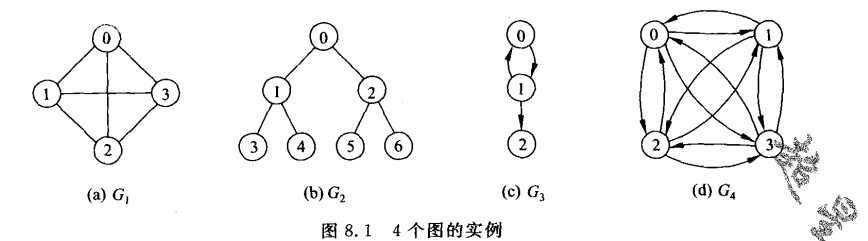
图分为有向图和无向图。顶点对<x,y>,有序图<x,y>和<y,x>是两条边,无序图<x,y>和<y,x>是一条边
3 图的存储结构
抽象类:
const int maxWeight = 100;
const int DefaultVertices = 30;
class Graph {
public:
Graph(int sz = DefaultVertices);
~Graph();
bool GraphEmpty()const {
if (numEdges == 0) return true;
else return false;
}
bool GraphFull()const {
if (numVertices == maxVertices ||
numEdges == maxVertices * (maxVertices - 1) / 2) return true;
else return false;
}
int NumberOfVertices() { return numVertices; } // 返回当前顶点数
int numberOfEdges() { return numEdges; } // 返回边数
virtual int getValue(int i); // 取顶点i的值,不合理返回0
virtual int getWeight(int v1, int v2); // 获取权值
virtual int getFirstNeighbor(int v); // 取顶点v的第一个邻接顶点
virtual int getNextNeighbor(int v, int w); // 取邻接顶点w的下一个邻接顶点
virtual bool insertVertex(const int vertex); // 插入一个顶点vertex
virtual bool insertEdge(int v1, int v2, int cost); // 插入边(v1,v2),权为cost
virtual bool removeVertex(int v); // 删去顶点v和所有与相关联边
virtual bool removeEdge(int v1, int v2); // 删去边
protected:
int maxVertices;
int numEdges;
int numVertices;
int getVertexPos(int vertex);
};
3.1 图的邻接矩阵表示
简单来说就是用矩阵表示邻接关系

看图很好理解(大学考试还考过
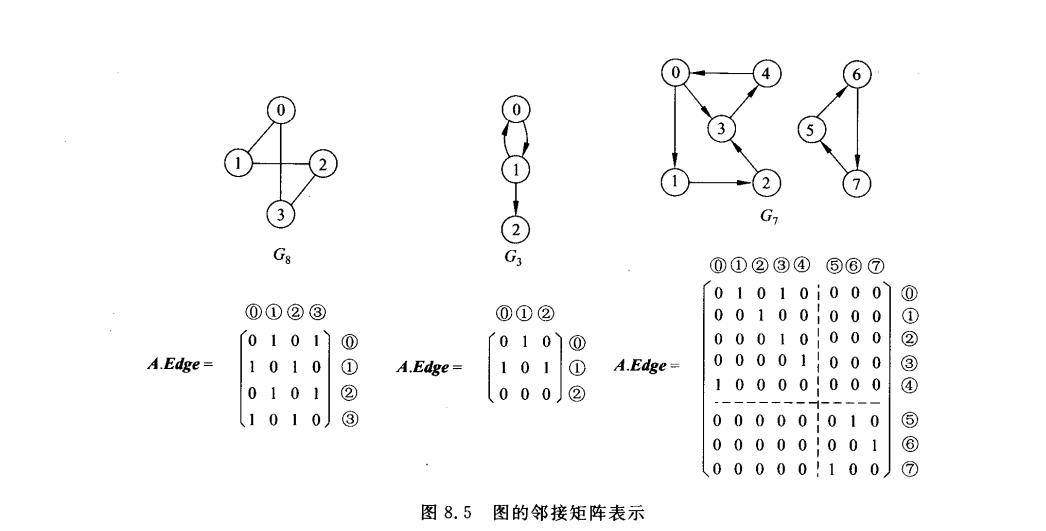
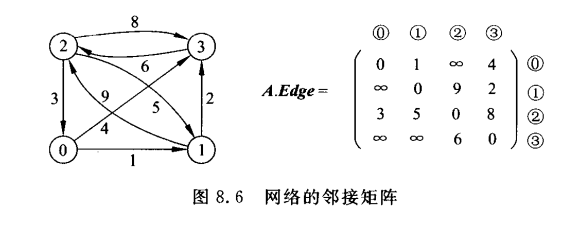
这是带权的:
#include <iostream>
using namespace std;
const int maxWeight = 100;
const int DefaultVertices = 30;
class Graph {
public:
Graph(int sz = DefaultVertices);
~Graph();
bool GraphEmpty()const {
if (numEdges == 0) return true;
else return false;
}
bool GraphFull()const {
if (numVertices == maxVertices ||
numEdges == maxVertices * (maxVertices - 1) / 2) return true;
else return false;
}
int NumberOfVertices() { return numVertices; } // 返回当前顶点数
int numberOfEdges() { return numEdges; } // 返回边数
virtual int getValue(int i); // 取顶点i的值,不合理返回0
virtual int getWeight(int v1, int v2); // 获取权值
virtual int getFirstNeighbor(int v); // 取顶点v的第一个邻接顶点
virtual int getNextNeighbor(int v, int w); // 取邻接顶点w的下一个邻接顶点
virtual bool insertVertex(const int vertex); // 插入一个顶点vertex
virtual bool insertEdge(int v1, int v2, int cost); // 插入边(v1,v2),权为cost
virtual bool removeVertex(int v); // 删去顶点v和所有与相关联边
virtual bool removeEdge(int v1, int v2); // 删去边
protected:
int maxVertices;
int numEdges;
int numVertices;
int getVertexPos(int vertex);
};
class Graphmtx :public Graph{
friend istream& operator>>(istream& in, Graphmtx& G);
friend ostream& operator<<(ostream& out, Graphmtx& G);
public:
Graphmtx(int sz = DefaultVertices);
~Graphmtx() { delete[]VerticesList; delete[]Edge; }
int getValue(int i) {
return i >= 0 && i <= numVertices ? VerticesList[i] : NULL;
}
int getWeigh(int v1, int v2) {
return v1 != -1 && v2 != -1 ? Edge[v1][v2] : 0;
}
int getFirstNeighbor(int v); // 取v的第一个邻接顶点
int getNextNeighbor(int v, int w); // 取v的邻接顶点w的下一个邻接顶点
bool insertVertex(const int vertex); // 插入vertex
bool insertEdge(int v1, int v2, int cost); // 插入v(v1,v2),权值为cost
bool removeVertex(int v); // 删除v和与其连接的所有v
bool removeEdge(int v1, int v2); // 在图中删去边(v1,v2)
private:
int* VerticesList;
int** Edge; // 邻接矩阵
int getVertexPos(int vertex) {
for (int i = 0; i < numVertices; i++)
if (VerticesList[i] == vertex) return i;
return -1;
}
};
int main()
{
std::cout << "Hello World!\n";
}
Graphmtx::Graphmtx(int sz)
{
maxVertices = sz;
numVertices = 0;
numEdges = 0;
int i;
int j;
VerticesList = new int[maxVertices];
Edge = (int**) new int* [maxVertices];
for (i = 0; i < maxVertices; i++) {
Edge[i] = new int[maxVertices];
}
for (i = 0; i < maxVertices; i++)
for (j = 0; j < maxVertices; j++)
Edge[i][j] = (i == j) ? 0 : maxWeight;
}
int Graphmtx::getFirstNeighbor(int v)
{
if (v != -1) {
for (int col = 0; col < numVertices; col++) {
if (Edge[v][col] > 0 && Edge[v][col] < maxWeight) return col;
}
}
return -1;
}
int Graphmtx::getNextNeighbor(int v, int w)
{
// 这个函数是为了获得v的已存在邻接顶点的下一个结点,
// 就相当于屏蔽掉w结点和W之前的结点
if (v != -1 && w != -1) {
for (int col = w + 1; col <= numVertices; col++)
if (Edge[v][col] > 0 && Edge[v][col] < maxWeight) return col;
}
return -1;
}
bool Graphmtx::insertVertex(const int vertex)
{
if (numVertices == maxVertices) return false;
VerticesList[numVertices++] = vertex;
return true;
}
bool Graphmtx::insertEdge(int v1, int v2, int cost)
{
if (v1 > -1 && v1<numVertices && v2>-1
&& v2 < numVertices && Edge[v1][v2] == maxWeight) {
Edge[v1][v2] = Edge[v2][v1] = cost;
numEdges++;
return true;
}
return false;
}
bool Graphmtx::removeVertex(int v)
{
if (v < 0 && v >= numVertices) return false;
if (numVertices == 1) return false;
int i, j;
VerticesList[v] = VerticesList[numVertices - 1];
for (i = 0; i < numVertices; i++) { // 减去与v相关联的边个数
if (Edge[i][v] > 0 && Edge[i][v] < maxWeight) numEdges--;
}
for (i = 0; i < numVertices; i++) {
Edge[i][v] = Edge[i][numVertices - 1]; // 用最后一列填补第v列,然后删除最后一列
}
numVertices--;
for (j = 0; j < numVertices; j++) {
Edge[v][j] = Edge[numVertices][j]; // 用最后一行填补第v行,然后
}
return true;
}
bool Graphmtx::removeEdge(int v1, int v2)
{
if (v1 > -1 && v1<numVertices && v2>-1 && v2 < numVertices
&& Edge[v1][v2] >0 && Edge[v1][v2] < maxWeight) {
Edge[v1][v2] = Edge[v2][v1] = maxWeight;
numEdges--;
return true;
}
return false;
}
3.2 图的邻接表表示
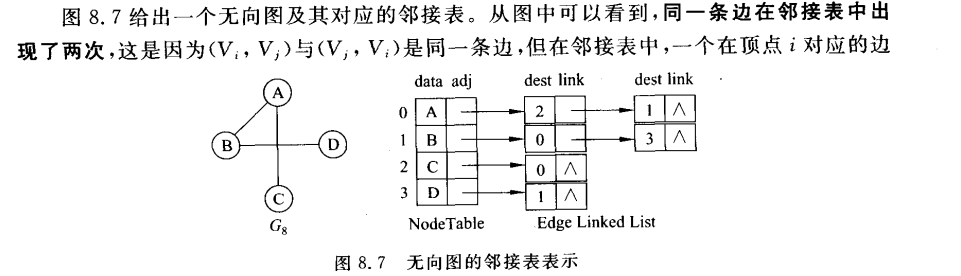
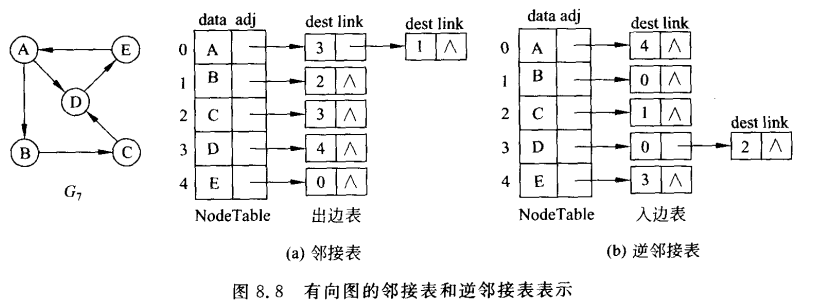
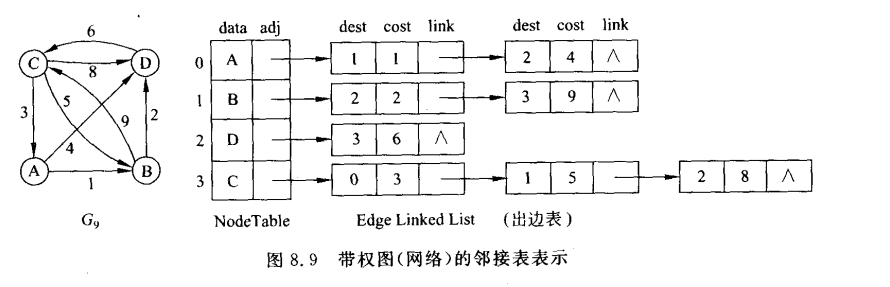
也很好理解
#include <iostream>
using namespace std;
const int maxWeight = 100;
const int DefaultVertices = 30;
class Graph {
public:
Graph(int sz = DefaultVertices);
~Graph();
bool GraphEmpty()const {
if (numEdges == 0) return true;
else return false;
}
bool GraphFull()const {
if (numVertices == maxVertices ||
numEdges == maxVertices * (maxVertices - 1) / 2) return true;
else return false;
}
int NumberOfVertices() { return numVertices; } // 返回当前顶点数
int numberOfEdges() { return numEdges; } // 返回边数
virtual int getValue(int i); // 取顶点i的值,不合理返回0
virtual int getWeight(int v1, int v2); // 获取权值
virtual int getFirstNeighbor(int v); // 取顶点v的第一个邻接顶点
virtual int getNextNeighbor(int v, int w); // 取邻接顶点w的下一个邻接顶点
virtual bool insertVertex(const int vertex); // 插入一个顶点vertex
virtual bool insertEdge(int v1, int v2, int cost); // 插入边(v1,v2),权为cost
virtual bool removeVertex(int v); // 删去顶点v和所有与相关联边
virtual bool removeEdge(int v1, int v2); // 删去边
protected:
int maxVertices;
int numEdges;
int numVertices;
int getVertexPos(int vertex);
};
struct Edge {
int dest; // 边的另一顶点位置
int cost; // 权值
Edge* link; // 下一条边链
Edge(){}
Edge(int num,int weight):dest(num),cost(weight),link(NULL){}
bool operator != (Edge& R)const {
return (dest != R.dest) ? true : false;
}
};
struct Vertex {
int data;
Edge* adj; // 边链表的头指针
};
class GraphLnk :public Graph {
public:
GraphLnk(int sz = DefaultVertices);
~GraphLnk();
int getValue(int i) {
return (i > 0 && i < numVertices) ? NodeTable[i].data : 0;
}
int getWeight(int v1, int v2);
bool insertVertex(const int& vertex);
bool removeVertex(int v);
bool insertEdge(int v1, int v2, int cost);
bool removeEdge(int v1, int v2);
int getFirstNeighbor(int v);
int getNextNeighbor(int v, int w);
private:
Vertex* NodeTable; // 顶点表
int getVertexPos(const int vertex) {
for (int i = 0; i < numVertices; i++)
if (NodeTable[i].data == vertex) return i;
return -1;
}
};
int main()
{
std::cout << "Hello World!\n";
}
GraphLnk::GraphLnk(int sz)
{
maxVertices = sz;
numVertices = 0;
numEdges = 0;
NodeTable = new Vertex[maxVertices];
if (NodeTable == NULL) { cout << "error when allocate memory!"; exit(1); }
for (int i = 0; i < maxVertices; i++)
NodeTable[i].adj = NULL;
}
GraphLnk::~GraphLnk()
{
for (int i = 0; i < numVertices; i++) {
Edge* p = NodeTable[i].adj;
while (p != NULL) {
NodeTable[i].adj = p->link;
delete p;
p = NodeTable[i].adj;
}
delete[]NodeTable;
}
}
int GraphLnk::getWeight(int v1, int v2)
{
if (v1 != -1 && v2 != -1) {
Edge* p = NodeTable[v1].adj;
while (p != NULL && p->dest != v2)
p = p->link;
if (p != NULL) return p->cost;
}
return 0;
}
bool GraphLnk::insertVertex(const int& vertex)
{
if (numVertices == maxVertices) return false;
NodeTable[numVertices].data = vertex;
numVertices++;
return true;
}
bool GraphLnk::removeVertex(int v)
{
if (numVertices == 1 || v < 0 || v >= numVertices) return false;
Edge* p, * s, * t;
int i, k;
while (NodeTable[v].adj != NULL) {
p = NodeTable[v].adj; // 找到目标结点
k = p->dest;
s = NodeTable[k].adj;
t = NULL;
while (s != NULL && s->dest != v) { // 找到对称结点
t = s;
s = s->link;
}
if (s != NULL) {
if (t == NULL) NodeTable[k].adj = s->link; // 删除对称存放的边结点
else t->link = s->link;
delete s;
}
NodeTable[v].adj = p->link;
delete p;
numEdges--;
}
numVertices--;
NodeTable[v].data = NodeTable[numVertices].data;
p = NodeTable[v].adj = NodeTable[numVertices].adj;
while (p != NULL) {
s = NodeTable[p->dest].adj;
while (s != NULL)
if (s->dest == numVertices) { s->dest = v; break; }
else s = s->link;
}
return true;
}
bool GraphLnk::insertEdge(int v1, int v2, int cost)
{
if (v1 >= 0 && v1 < numVertices && v2 >= 0 && v2 < numVertices) {
Edge* q;
Edge* p = NodeTable[v1].adj; // 找到v1
while (p != NULL && p->dest != v2)
p = p->link; // 需按照邻接顶点v2
if (p != NULL) return false;
p = new Edge;
q = new Edge;
// 创建新结点v2,连接到v1的表
p->dest = v2;
p->cost = cost;
p->link = NodeTable[v1].adj; // 找到v2
NodeTable[v1].adj = p; // 连接到v2的表
q->dest = v1;
q->cost = cost;
q->link = NodeTable[v2].adj;
NodeTable[v2].adj = q;
numEdges++; // 存在表头
return true;
}
return false;
}
bool GraphLnk::removeEdge(int v1, int v2)
{
if (v1 != -1 && v2 != -1) {
Edge* p = NodeTable[v1].adj;
Edge* q = NULL;
Edge* s = p;
while (p != NULL && p->dest != v2) {
q = p;
p = p->link; // 找到被删的边
}
if (p != NULL) {
if (p == s) NodeTable[v1].adj = p->link; // 被删边是首结点
else q->link = p->link; // 重新连接
delete p;
}
else return false;
p = NodeTable[v2].adj; // 删除v2对应的边
q = NULL;
s = p;
while (p->dest != v1) {
q = p;
p = p->link;
}
if (p == s) NodeTable[v2].adj = p->link;
else q->link = p->link;
delete p;
return true;
}
return false;
}
int GraphLnk::getFirstNeighbor(int v)
{
if (v != -1) {
Edge* p = NodeTable[v].adj;
if (p != NULL) return p->dest;
}
return -1;
}
int GraphLnk::getNextNeighbor(int v, int w)
{
if (v != -1) {
Edge* p = NodeTable[v].adj;
while (p != NULL && p->dest != w) p = p->link;
if (p != NULL && p->link != NULL)
return p->link->dest;
}
return -1;
}
搞不懂可以取看单链表
4. 图的遍历
给每个顶点加一个标志位visited,避免重复访问
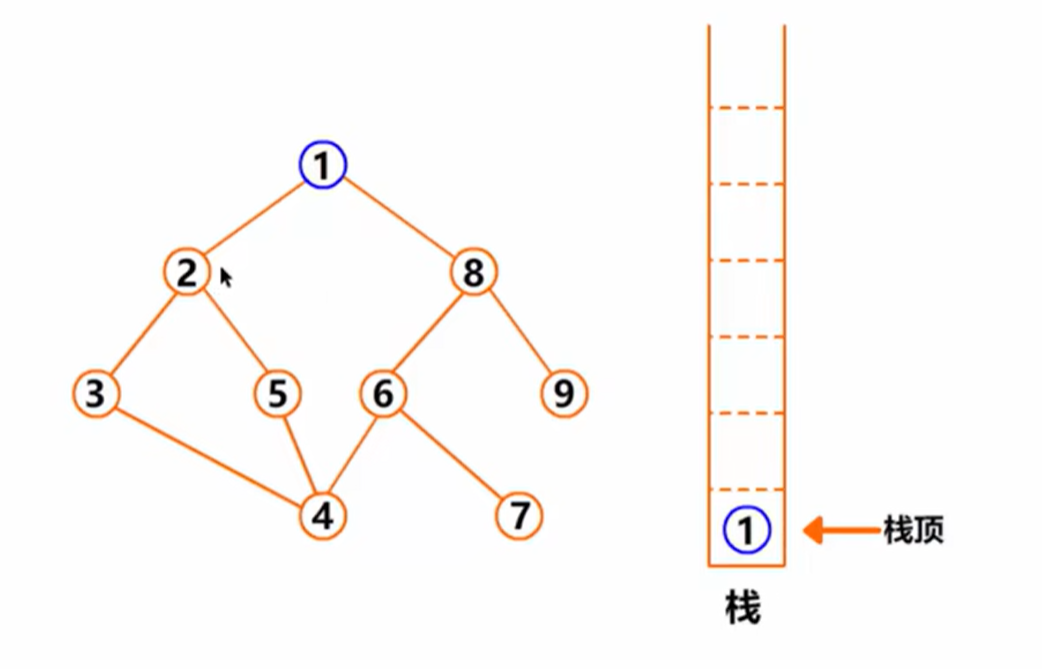
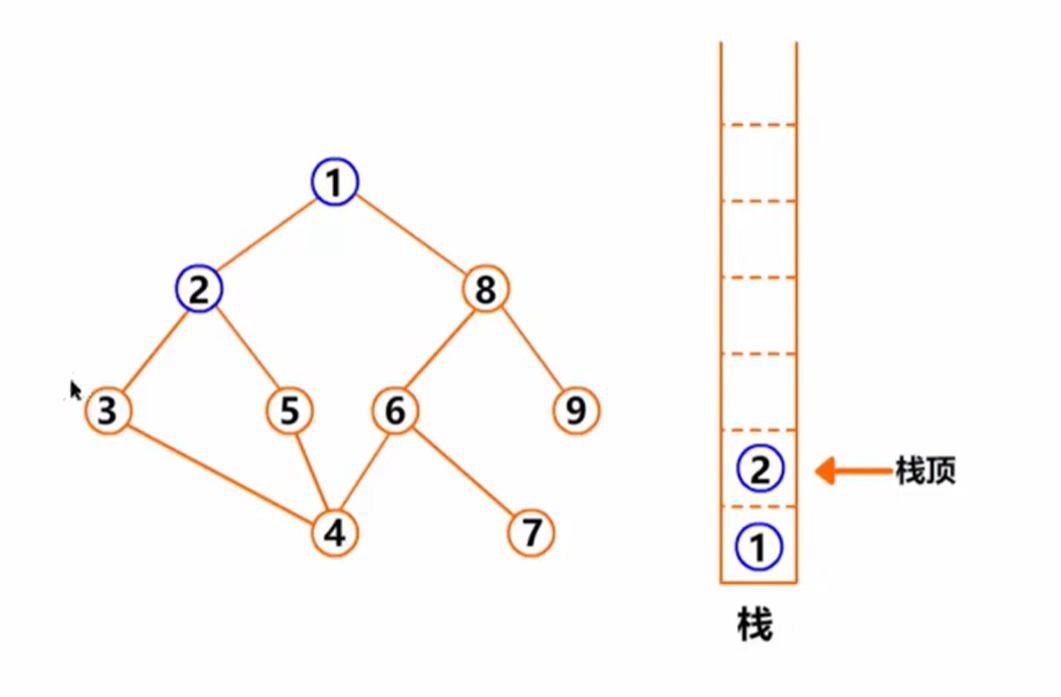
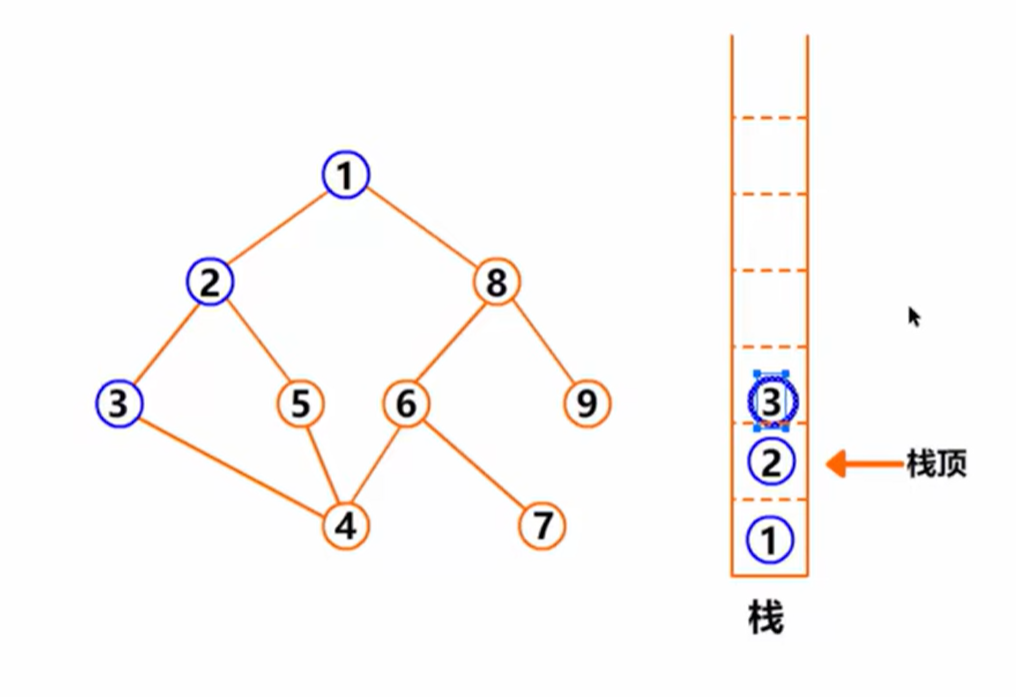
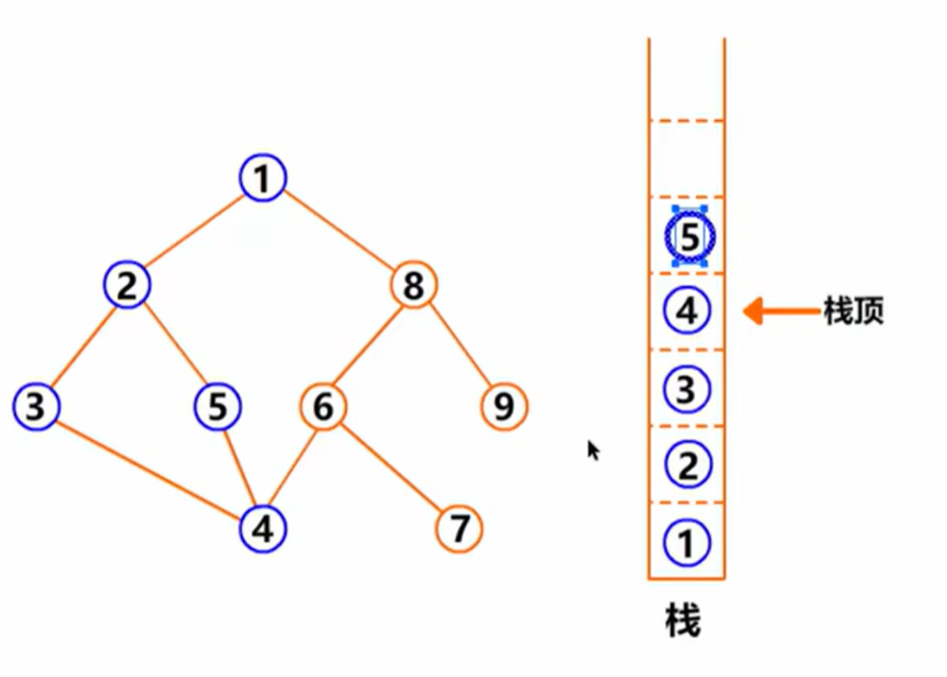
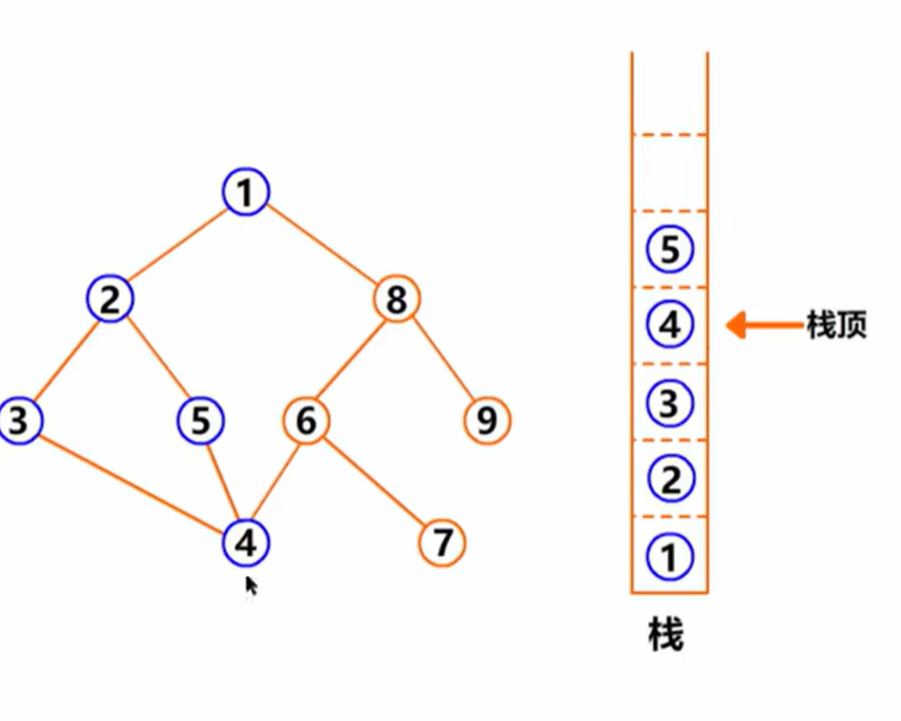
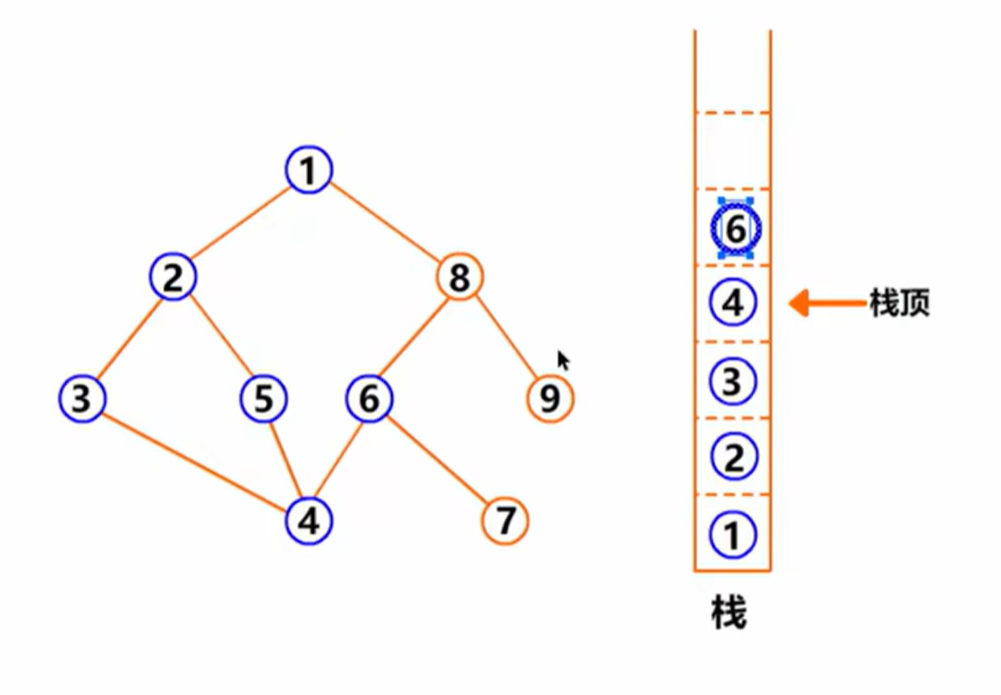
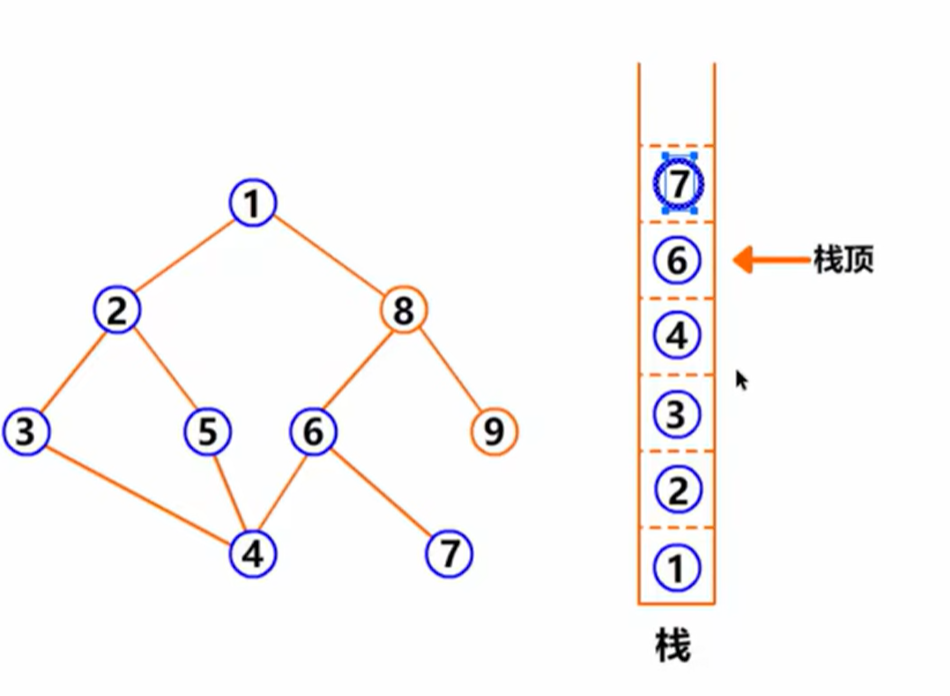
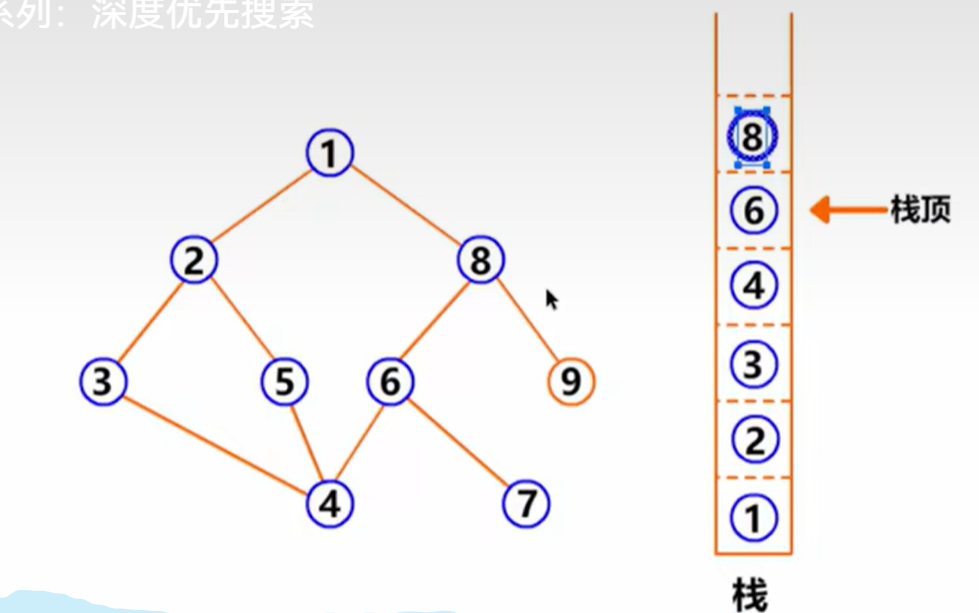
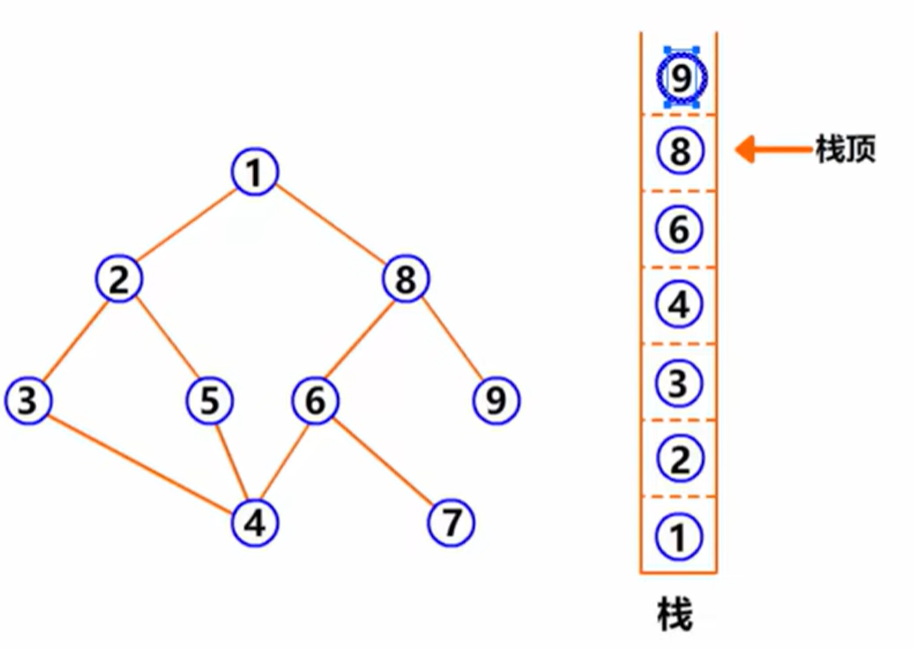
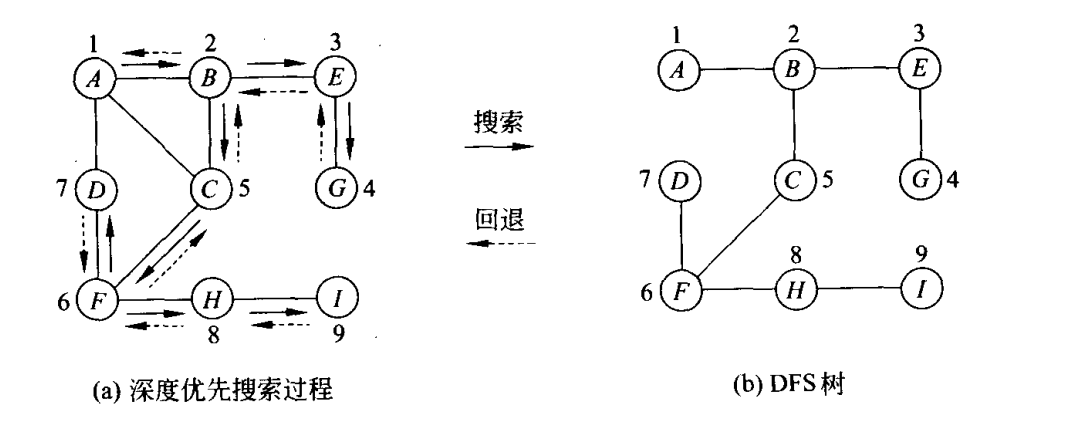
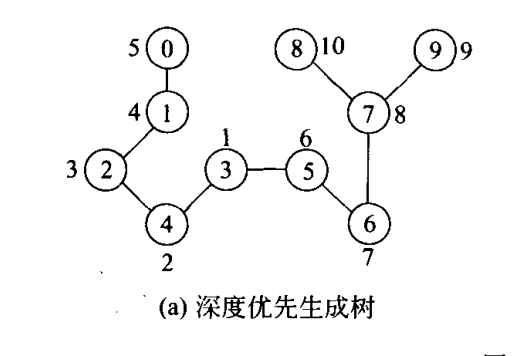
4.1 深度优先搜索
一条路走到底,如果走不动,就返回上一个状态(结点)搜索这个状态的其他结点,如果邻接结点都被访问过了,再返回上一个节点进行搜索

void DFS(Graph& G, int v, bool visited[]) {
cout << G.getValue(v) <<endl;
visited[v] = true;
int w = G.getFirstNeighbor(v); // 前三部处理开始,也就是顶点的V
while (w != -1) {
if (visited[w] == false) DFS(G, w, visited); // 如果没被访问过,则对这个顶点进行广度搜索
w = G.getNextNeighbor(v, w); // 如果被访问过,则寻找下一个邻接顶点,然后循环
}
}
void DFS(Graph& G, const int v) {
// 从顶点v出发,对图G进行深度优先遍历
int loc;
int n = G.NumberOfVertices();
bool* visited = new bool[n];
for (int i = 0; i < n; i++) visited[i] = false;
loc = G.getVertexPos(v);
DFS(G, loc, visited);
delete[]visited;
}
4.2 广度优先遍历
广度优先相当于一下子把这个结点的所有邻接结点都访问了,然后找邻接结点的结点
void BFS(Graph& G, const int v) {
int w, n = G.NumberOfVertices();
bool* visited = new bool[n];
for (int i = 0; i < n; i++) visited[i] = false;
int loc = G.getVertexPos(v);
cout << G.getValue(loc) << endl; // 获得首个结点
visited[loc] = true;
Queue Q;
Q.EnQueue(loc); // 顶点进队列
while (!Q.IsEmpty()) {
Q.DeQueue(loc);
w = G.getFirstNeighbor(loc);
while (w != -1) {
if (visited[w] == false) {
cout << G.getValue(w) << "endl";
visited[w] = true;
Q.EnQueue(w);
}
w = G.getNextNeighbor(loc, w);
}
delete[]visited;
}
}
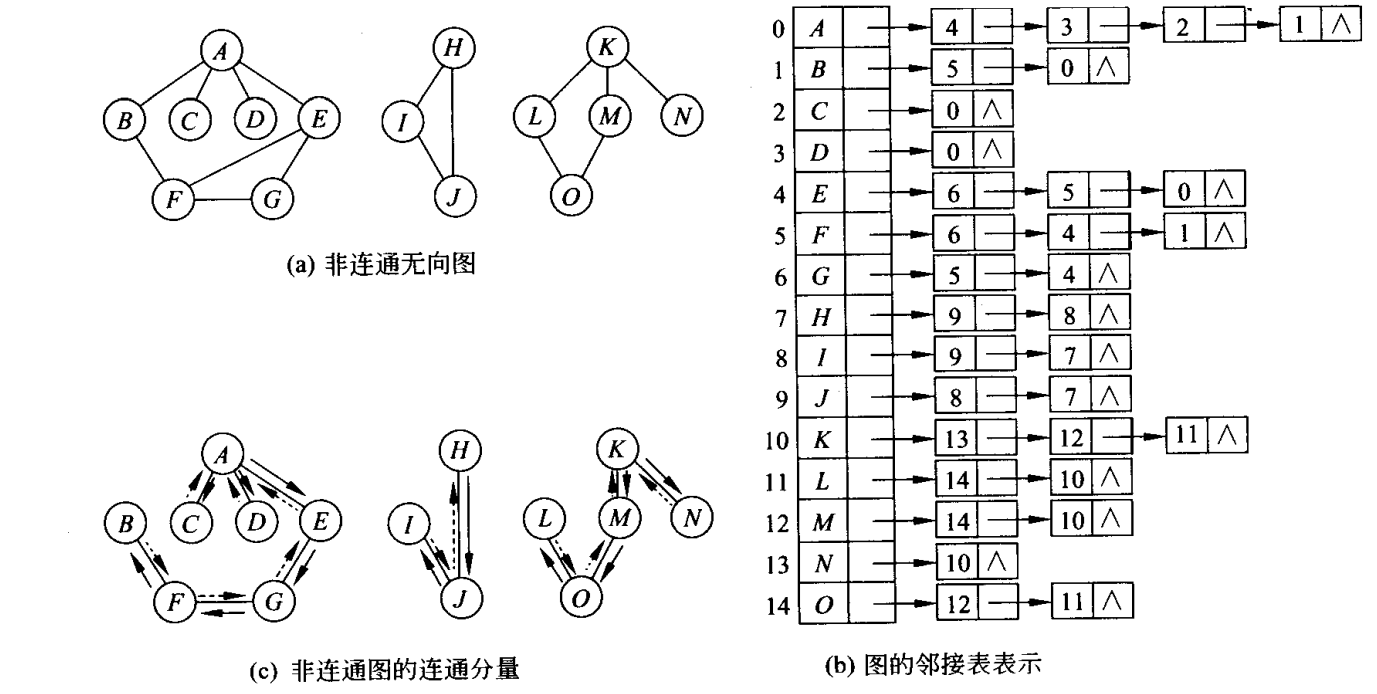
5 连通分量
顶点访问他结点,最多结点的路径上的结点构成连通分量。
void Components(Graph& G) {
int n = G.NumberOfVertices();
bool* visited = new bool[n];
for (int i = 0; i < n; i++) visited[i] = false;
for(int i=0;i<n;i++)
if (visited[i] == false) {
DFS(G, i, visited);
OutputNewComponent(); // 输出连通分量
}
delete[] visited;
}
用DFS遍历的话,很容易得到连通分量。
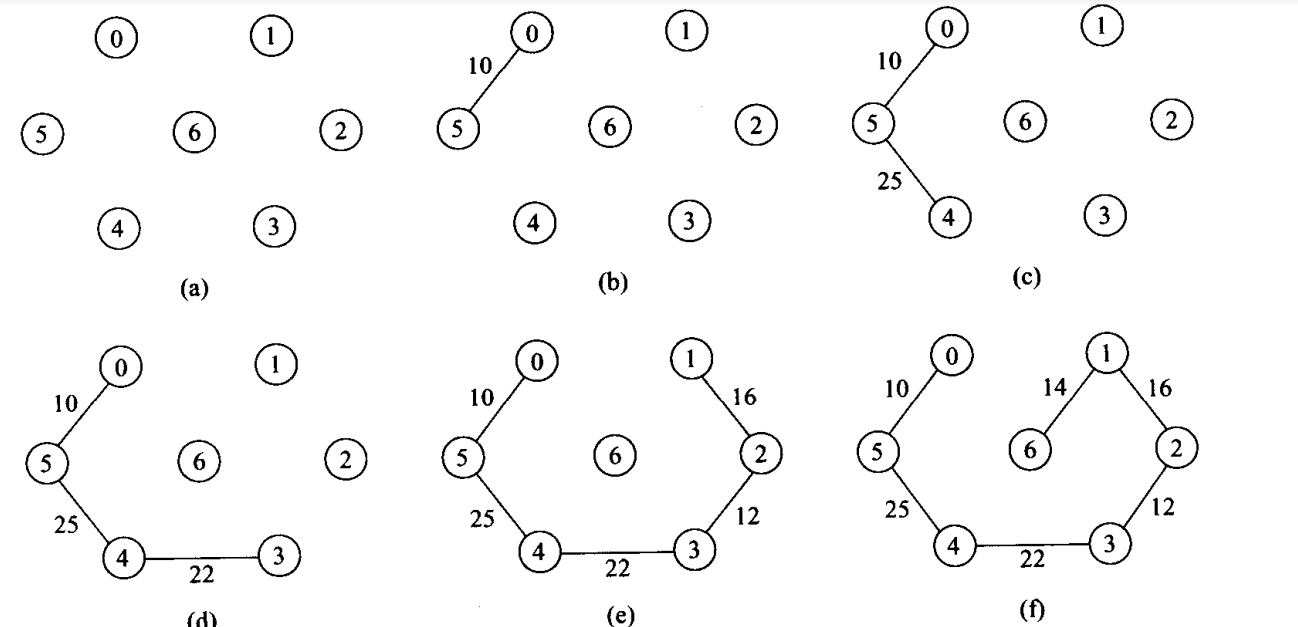
6 最小生成树
用DFS和BFS访问所有结点产生的边。树不能有环
图的生成树删去任何一条边,生成树就不再连接,引入新边后能恰好生成一个回路。对带权图而言,不同生成树所带有的权值不同。

6.1 Kruskal 算法
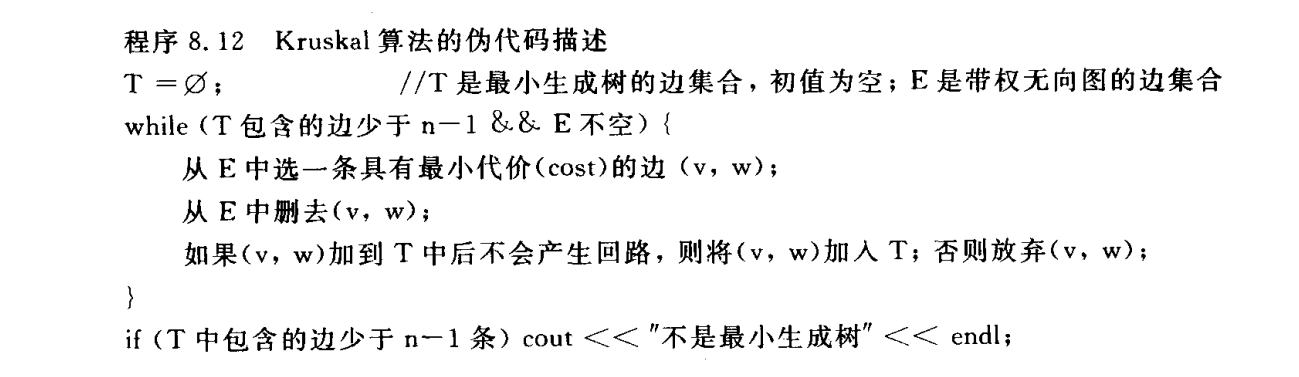
就选权值最小的边,直到边=结点数-1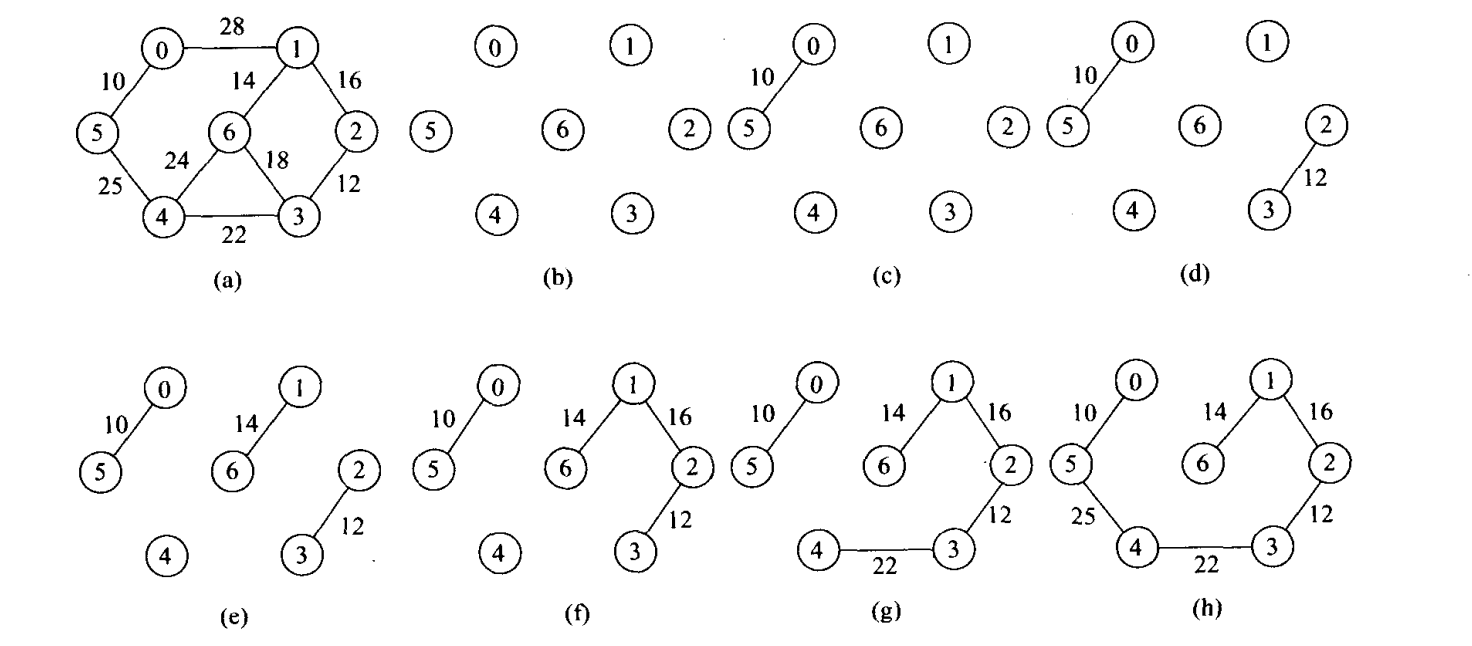
6.2 实现

void Kruskal(Graph& G, MinSpanTree& MST) {
MSTEdgeNode ed;
int u, v, count; // 边界点辅助单元
int n = G.NumberOfVertices(); // 顶点数
int m = G.NumberOfEdges(); // 边数
MinHeap H(m); // 最小堆
UFSet F(n); // 并查集
for(u = 0;u>n;i++)
for(v = u+1;v<n;v++)
if (G.getWeight(u, v) != maxValue) {
ed.tail = u;
ed.head = v;
ed.key = G.getWeight(u, v);
H.Insert(ed); // 插入堆
}
count = 1; // 最小生成树加入边数计数
while (count < n) { // 取n-1条边
H.RemoveMin(ed);
u = F.Find(ed.tail);
v = F.Find(ed.head); // 找到两个结点
if (u != v) {
F.Union(u, v); // 连接两节点
MST.Insert(ed); // 存入最小生成树
count++;
}
}
}
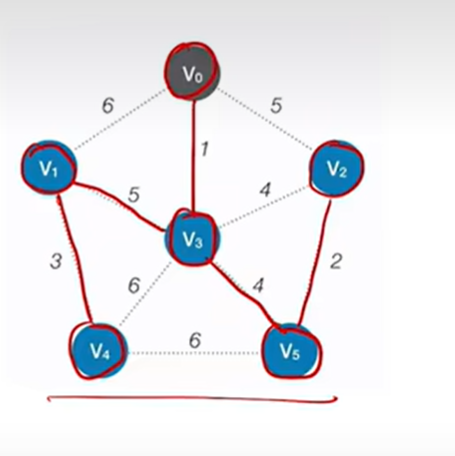
6.2 Prim 算法
书上讲的晦涩难懂
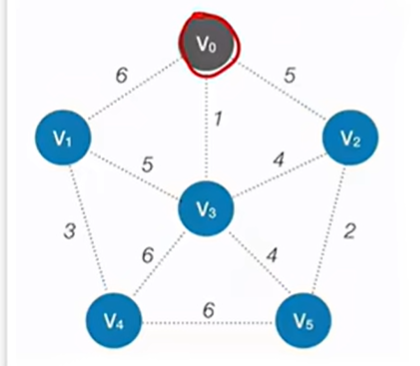
这样一个图,求他最小生成树,首先任选一个结点,这里选v0,
然后看连接他的结点,v1,v2,v3,找到最小权值的边<v0,v3>
然后把v0,v3看作一个整体,
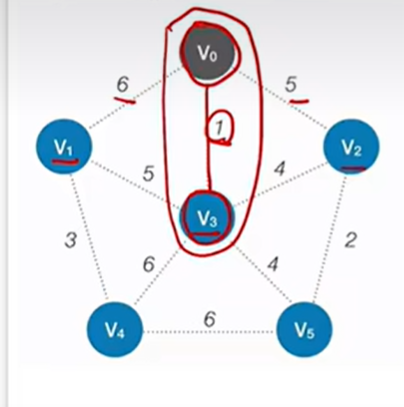
查看连接到这个集合的结点,v1,v2,v4,v5
发现有两个最小的边v2,v5,我们任选一边(得出最小生成树可能不止一棵)
这里选v2,再把v2加入集合中
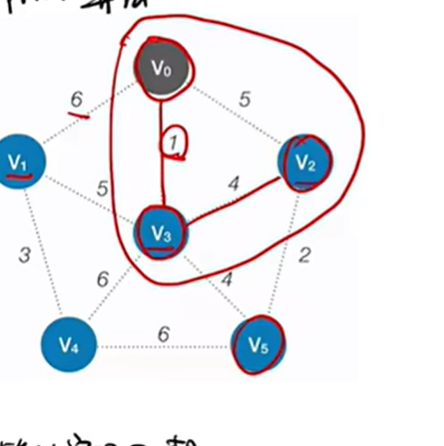
查找到最小的权值边为<v2,v5>
加入集合
依次类推
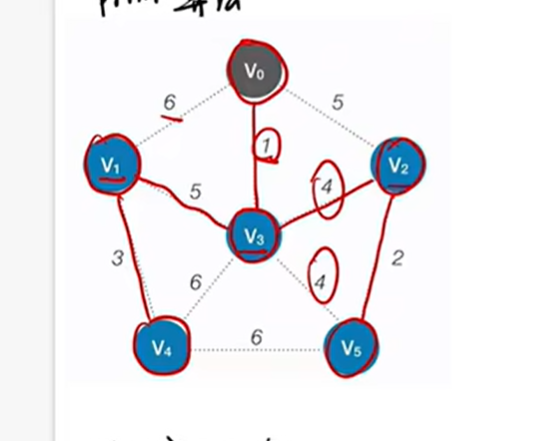
最终得到这样一棵树
但刚才有共同权值的,我们再算出另一棵树
void Prim(Graph& G, const int u0, MinSpanTree& MST) {
MSTEdgeNode ed;
int i, u, v, count;
int n = G.NumverOfVertices(); // 顶点数
int m = G.NumberOfEdges(); // 边数
int u = G.getVertexPos(u0); // 起始顶点号u
MinHeap H(m);
bool Vmst = new bool[n];
for (i = 0; i < n; i++) Vmst[i] = false;
Vmst[u] = true;
count = 1;
do {
v = G.getFirstNeighbor(u);
while (v != -1) {
if (Vmst[v] == false) {
ed.tail = u;
ed.head = v;
ed.key = G.geiWeight(u, v);
H.Insert(ed); // 存所有边到最小堆
}
v = G.getNextNeighbor(u, v);
}
while (H.IsEmpty() == false && count < n) {
H.RemoveMin(ed); // 找到权值最小的边
if (Vmst[ed.head] == false) {
MST.Insert(ed);
u = ed.head;
Vmst[u] = true;
count++;
break;
}
}
} while (count < n);
}
7 最短路径
像各城市一样,找到一个城市到另一个城市的最短路径。
7.1 dijkstra算法
以下部分出自B站
Dijkstra算法手动模拟流程
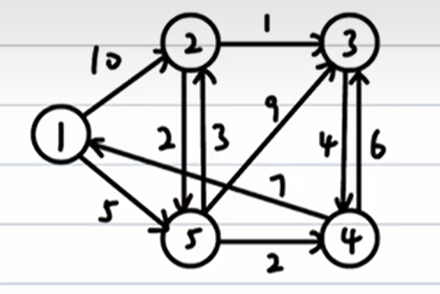
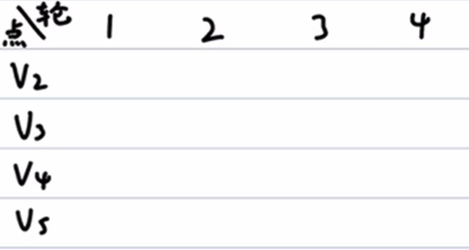
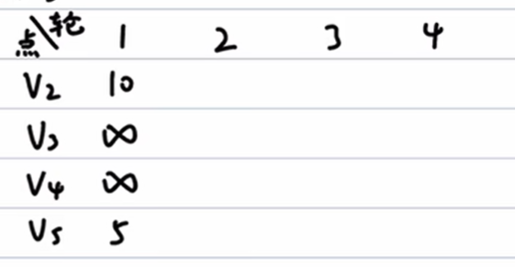
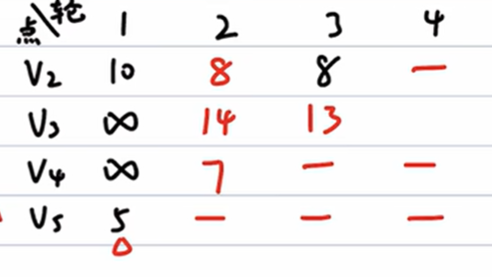
首先准备一个表,然后我们选取第一个点v1
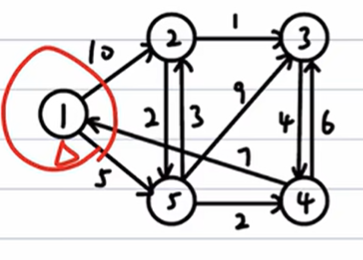
看他的出度,是<1,2> = 10, <1,5> = 5。记录到表中的第一轮
和prim算法一样,选取离v1最短的v5,划到已选取的范围中
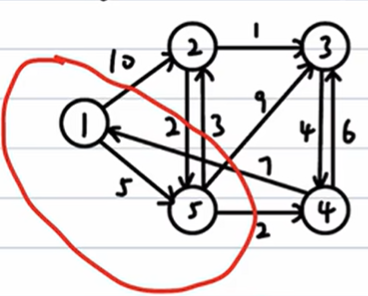
观察出度,并忽略到之前已经看到过的出度的那条边,并且计算到点的距离时要加上上一轮选的结点5的权值3
此时连接到圈内的出度:到v2 = 5+3 =8,到v3=5+9=14,到v4=5+2=7,并记录到表中,如果比上次记录的要短,则更新,本轮有没有更新
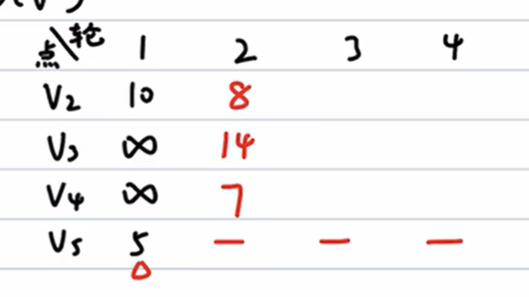
选择最短的点v4,加入到圈中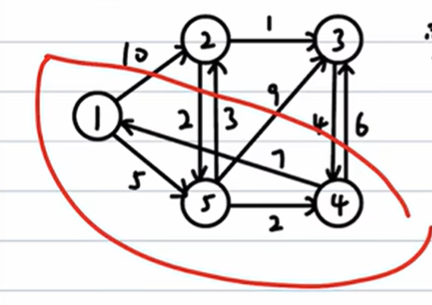
此时看出度,因为已经选了v4,所以无法从已经选择的路径1->5->4 到达2,所以本轮的到v2的距离不变,保持上一轮的搜索结果,到达v3的最短距离是v3 = 7+6=13,比上一轮的的距离要短,记录到表中
选择距离最短的点v2,加入到圈中
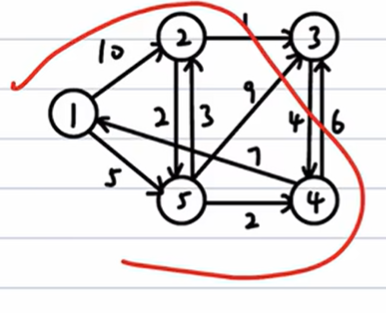
看没看过的出度,就是1,所以到v3的记录就是v3 = 8+1=9
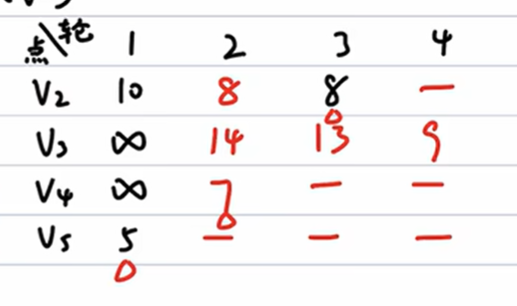
最后遍历完,简单就是,谁没进圈,就看圈到这个点的距离,和prim算法很像
书上的实现,真的跟那啥一样
void ShortestPath(Graph& G, int v, int dist[], int path[]) {
int n = G.NumberOfVertices();
bool* S = new bool[n]; // 判断是否已经进圈
int i, j, k;
int w, min;
for (i = 0; i < n; i++) {
dist[i] = G.getWeight(v, i); // 数组初始化,先存权值
S[i] = false; // 所有结点都不在圈内
if (i != v && dist[i] < maxWeight) path[i] = v; // 存最短路径
else path[i] = -1;
}
S[v] = true;
dist[v] = 0; // 顶点v先进
for (i = 0; i < n - 1; i++) {
min = maxWeight;
int u = v; // 选不在圈S中的最短路径的顶点u
for (j = 0; j < n; j++) {
if (S[j] == false && dist[j] < min) { u = j; min = dist[j]; } // 循环结点,找到最短路径的顶点u
S[u] = true;
for (k = 0; k < n; k++) { // 修改
w = G.getValue(u, k);
if (S[k] == false && w < maxWeight && dist[u] + w < dist[k]) {
dist[k] = dist[u] + w;
path[k] = u; // 如果要短一些,就改表里的值
}
}
}
}
}
读取,看这些代码图一乐就行,写得真的不是很尽人意
void printShortestPath(Graph& G, int v, int dist[], int path[]) {
cout << "从顶点" << G.getValue(v) << "到其他顶点的最短路径为:" << endl;
int i, j, k, n = G.NumberOfVertices();
int* d = new int[n];
for(i = 0;i<n;i++)
if (i != v) {
j = i; k = 0;
while (j != v) { d[k++] = j; j = path[j]; }
cout << "顶点" << G.getValue(I) << "的最短路径为:" << G.getValue(v);
while (k > 0) {
cout << G.getValue(d[--k]) << "";
cout << "最短路径长度" << dist[i] << endl;
}
delete[]d;
}
}
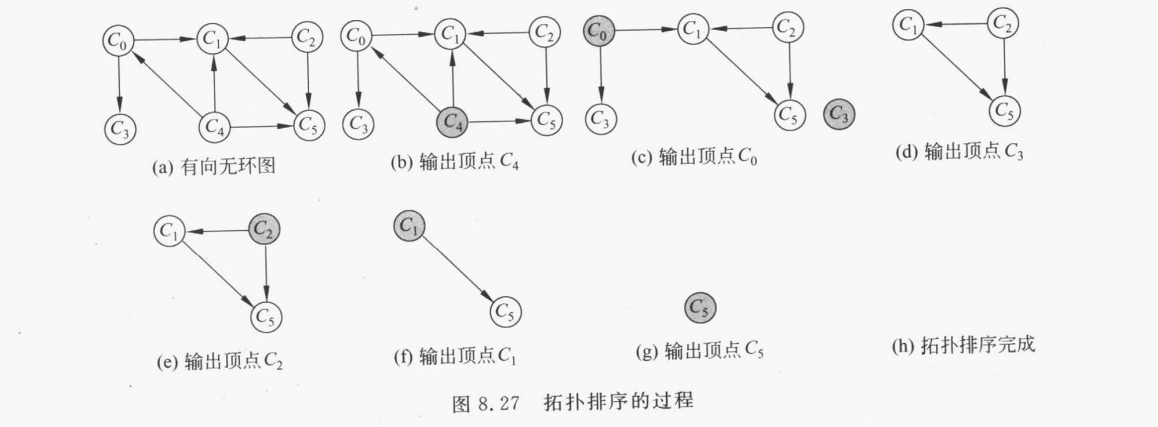
8 用顶点表示活动的网络(AOV)
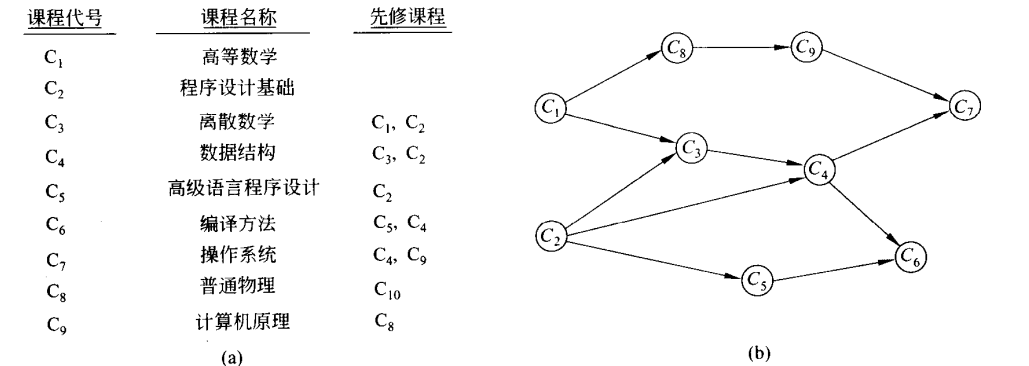
如要学c3,必须先学C1C2
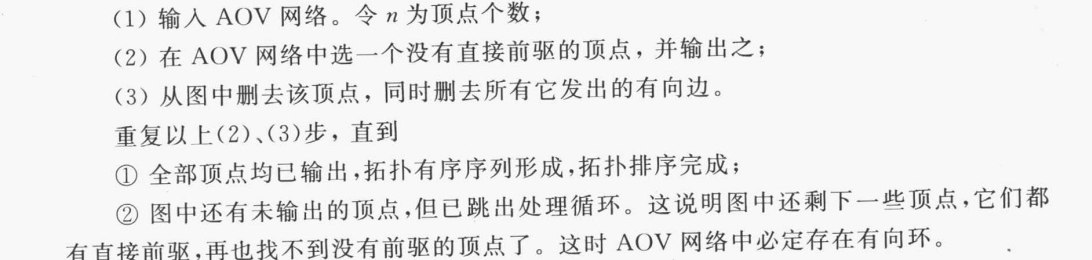
删掉没有直接前驱的顶点,和该顶点有的边。然后找下一个没有直接前驱的顶点
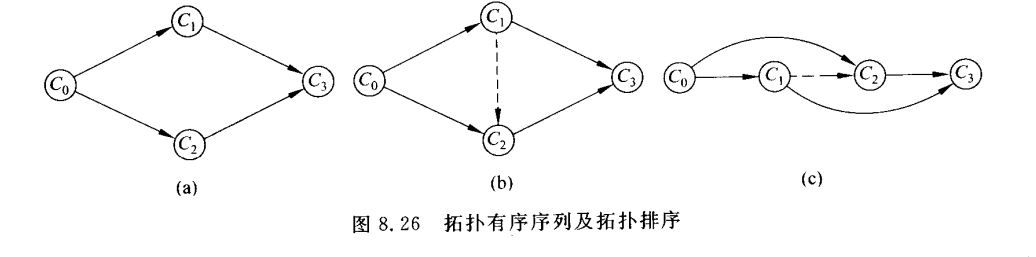
求拓补排序
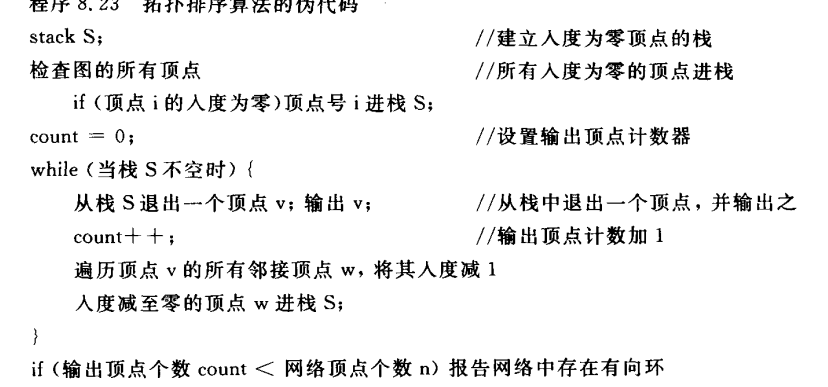
实现方法还是挺简单的,直接看代码
void TopologicalSort(Graph& G) {
int i, j, w, v;
int top = -1;
int n = G.NumberOfVertices();
int* count = new int[n]; // 记录每个结点的入度
for (i = 0; i < n; i++) count[i] = 0;
cin >> i >> j; // 输入一条边
while (i > -1 && i < n && j < -1 && j < n) {
G.insertEdge(i, j);
count[j]++;
cin >> i >> j;
}
for(i = 0;i<n;i++)
if (count[i] == 0) { count[i] = top; top = i; } // 入度为0的顶点进栈
for (i = 0; i < n; i++) {
if (top == -1)
{
cout << "有回路" << endl;
return;
}
else {
v = top;
top = count[top];
cout << G.getValue(v) << "" << endl; // 输出
w = G.getFirstNeighbor(v); // 找到入度为0的结点的首个邻接结点
while (w!=-1)
{
if (--count[w] == 0) // 邻接顶点入度-1
{
count[w] = top;
top = w; // 入度为0,入栈
}
w = G.getNextNeighbor(v, w); // 找到下一个
}
}
}
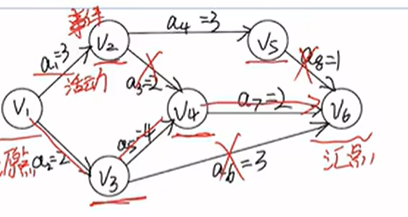
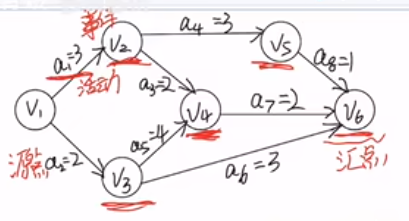
9 用边表示活动的网络(AOE)
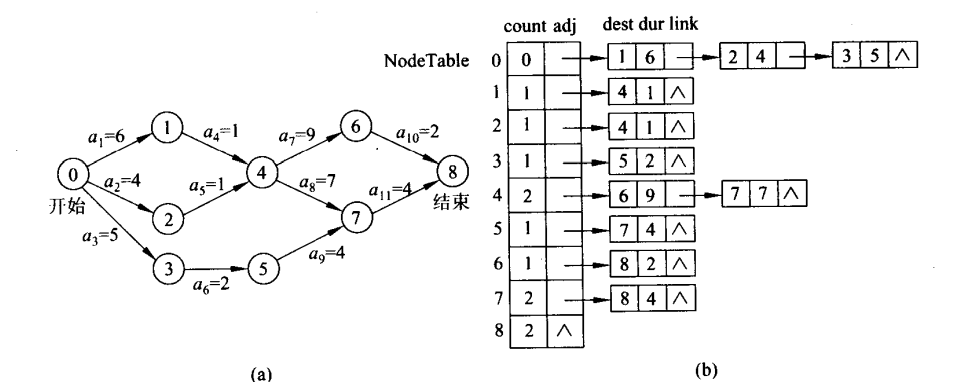
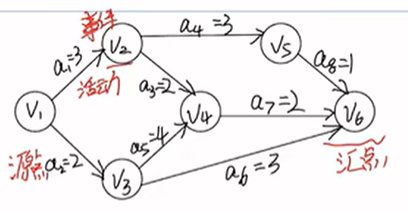
例子是,有一个工程,都是从0开始,做不同的事情,上图中,1,2,3是可以一起做的事情,但如果要从结点4往下做,则需要1,2都做完才能到达4,随后在做其他事情
因此,完成整个工程所需要的时间,是这条路径上所有活动的持续时间之和,路径最长的路径就是关键路径。
这一段从B站学
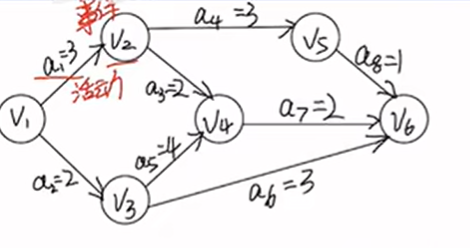
AOE网求关键路径,包含所有事件和活动的最早或最晚发生时间
首先知道两个概念,活动和事件,活动是边,事件是结点
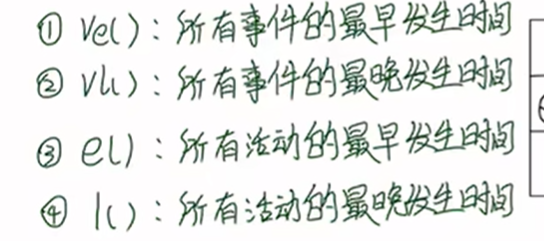
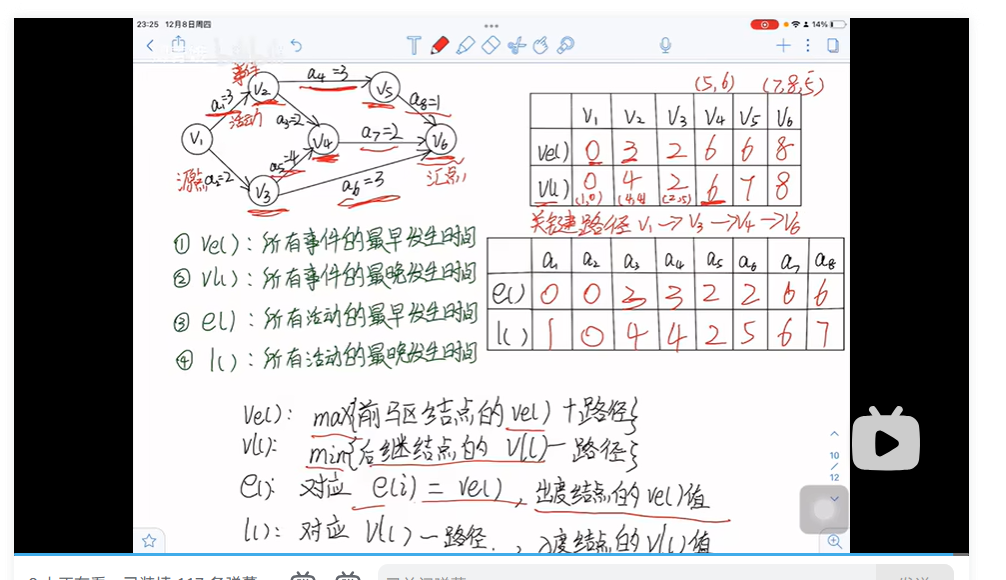
四个概念
先提出怎么算,然后依次来算
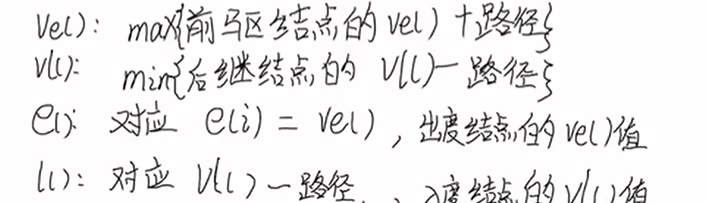
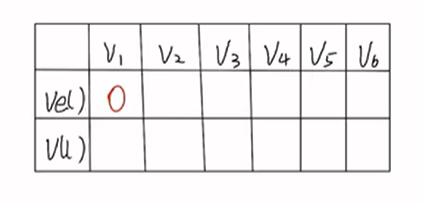
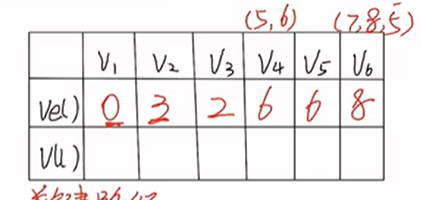
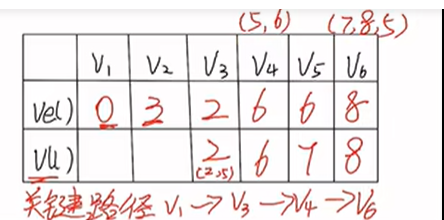
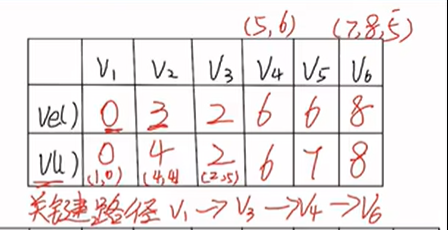
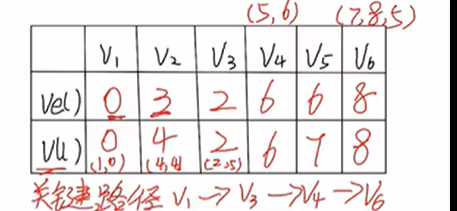
9.1 VE 事件最早发生时间
首先算Ve(),就是事件最早发生时间,
首先看结点v1原点,他前驱结点+路径=0,填入表中
看v2,他直接前驱v1的ve+路径a1 = 0+3 = 3;填入表中
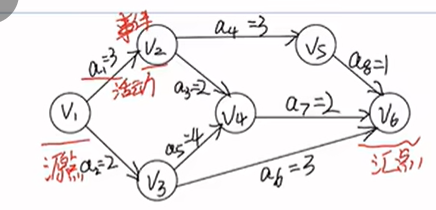
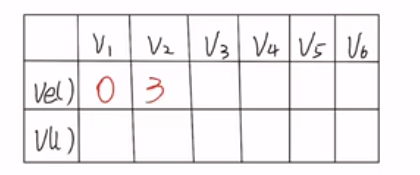
看v3,其前驱结点v1的ve0+路径a2 = 0+2 = 2,填入表中
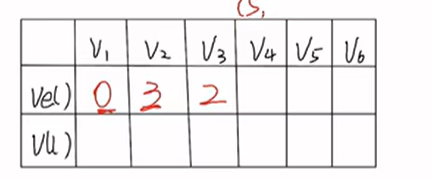
看v4,他前驱结点有两个,分别是v2,v3.此时v4的ve可以从两个地方算
第一条v2的ve+ a3 = 3+2 = 5
第二条v3的ve+a5 = 2+4=6
我们取最大的值6,填入表中,并舍弃a3

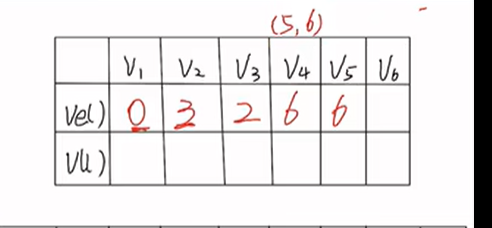
然后计算v5,前驱结点v2的ve+a4 = 3+3 =6,填入
最后算v6,和v4一样,有三条路,依次算出取最大的那个
v5的Ve + a8 = 6+1 =7;
v4的ve + a7 =6+2 =8;
v3的ve + a6 = 2+3 =5;
取8,并舍弃a8和a6
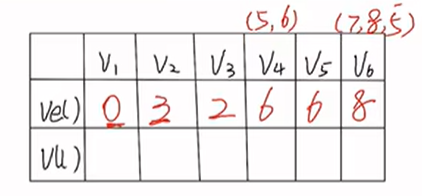
所以我们得出的关键路径:
看删去的边,连不到最终结点v6的就不要管,只管连得到的
v1->v3->v4->v6
这就是关键路径
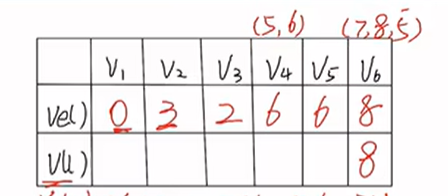
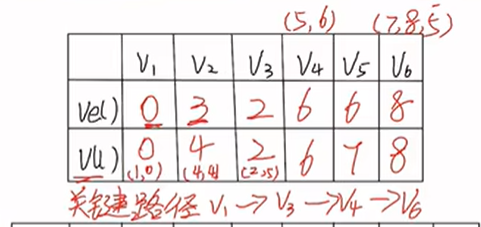
9.2 VL 事件最晚发生时间
后继结点的V(l)-路径的最小值
我们要从ve取最后结点的值
v6结点的vl 等于v6结点的ve,所以我们已知V6的vl=8,填入表中
看到v6的路径有3条,我们分别算出v4,v5的各个的值
v4的 = vl(v6) - a7 = 8-2 = 6
v5的 = vl(v6) -a8 = 8-1 =7
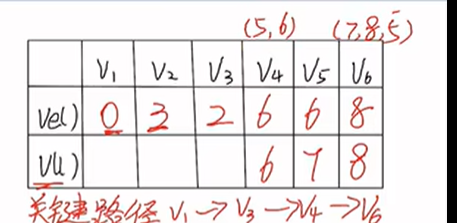
我们算v3的时候,发现他有两个后继结点,我们分别算出
- vl(4) - a5 = 6-4 =2
- vl(6) - a6 = 8-3 =5
我们取最小的2填入
算v2 - vl(4) - a3 = 6-2 =4;
- vl(5) - a4 = 7-3 = 4;
所以vl(2) = 4
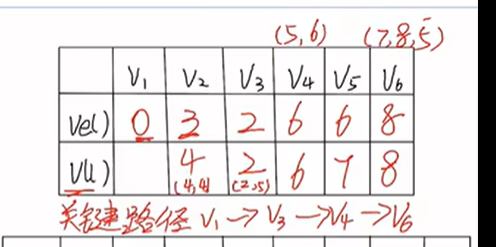
v1 = 0肯定的
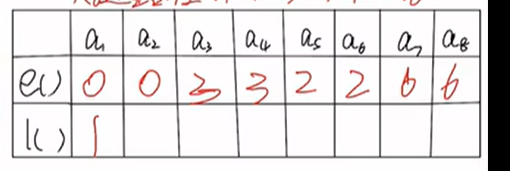
9.3 E()活动的最早发生时间
e(i) = ve(i) 出度结点
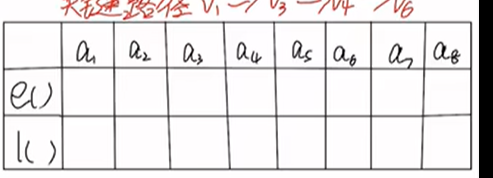
a1的出度结点为v1,所以e(1) = ve(1) = 0
a2的出度节点v1,所以e(2) = ve(2) = 0
同理 a3 =ae(v2) = 3,同理我们直接写完
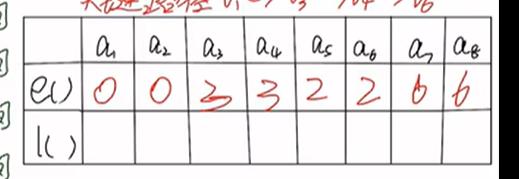
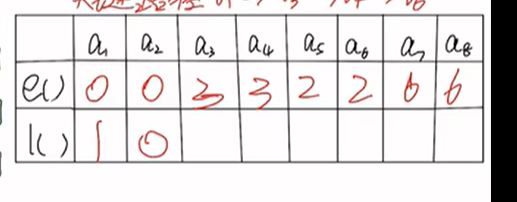
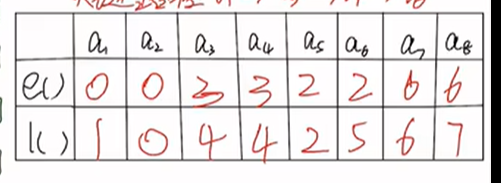
9.4 L()活动的最晚发生时间
vl() - 路径,入度结点的vl()值
a1的入度结点时v2,然后求出a1的L()的值: VL(V2) - a1的路径长度 = 4-3 = 1填入
a2 = vl(v3) -2 =2-2 =0
a3 = vl(v4)-a3 = 6-2 = 4
a4 = vl(v5) - 3 = 7-3 =4
a5 = vl(v4) - a5 = 6-4 =2
a6= vl(v6) - a6 = 8-3 =5
a7 = vl(v6) - a7 = 8-2=6
a8 = vl(v6) - a8 = 8-1 = 7
void CriticalPath(Graph& G) {
int i, j, k;
int Ae, Al, w;
int n = G.NumberOfVertices();
int* Ve = new int[n];
int* Vl = new int[n];
for (i = 0; i < n; i++) Ve[i] = 0;
for (i = 0; i < n; i++) {
j = G.getFirstNeighbor(i);
while (j!=-1)
{
w = G.getWeight(i, j);
if (Ve[i] + w > Ve[j]) Ve[j] = Ve[i] + w; // ve = 前驱结点的ve+路径长度,去最大值
// 如果算出来的ve更大,就填更大的数
j = G.getNextNeighbor(i, j); // 找到下一个结点
}
}
Vl[n - 1] = Ve[n - 1]; // 汇点的 Vl = VE
for (j = n - 2; j > 0; j--) {
k = G.getFirstNeighbor(j);
while (k != -1) {
w = G.getWeight(j, k);
if (Vl[k] - w < Vl[j]) Vl[j] = Vl[k] - w; // vl = 后继节点的vl - 路径长度,取最小值
k = G.getNextNeighbor(j, k);
}
}
for (i = 0; i < n; i++) {
j = G.getFirstNeighbor(i);
while (j!= -1)
{
Ae = Ve[i];
Al = Vl[k] - G.getWeight(i, j); // 入度的vl()- 路径长度
if (Al == Ae) cout << "<" << G.getValue(i) << "," << G.getValue(j) << ">" << "是关键活动" << endl;
j = G.getNextNeighbor(i, j);
}
}
delete[] Ve;
delete[] Vl;
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- YOLO蒸馏原理篇之---MGD、CWD蒸馏
- 基于WebFlux的websocket的分组和群发实现
- 仓库出入库登记系统的推荐
- 具体数学复习篇——第三章整值函数01取整(平常作业题中有谱的分割证明,复习仍然还需注意)
- mysql
- 代码随想录算法训练营第二十九天| 491.递增子序列、46.全排列、47.全排列 II
- 数值计算精度、舍入和溢出问题
- 云渲染如何使用?其实很简单,只需3步就搞定了!
- 思科认证 | CCIE安全看什么书?
- react craco配置响应式postcss-px-to-viewport