OpenVINS学习5——VioManager.cpp/h学习与注释
前言
之前又看到说VioManager.cpp/h是OpenVINS中的核心程序,这次就看看这里面都写了啥,整体架构什么样,有哪些函数功能。具体介绍:
VioManager类
整体分析
VioManager类包含 MSCKF 工作所需的状态和其他算法。我们将测量结果输入到此类中,并将它们发送到各自的算法。如果我们有要传播或更新的测量值,此类将调用我们的状态来执行此操作。
主要包含下面6个函数/类:
VioManager类的初始化
VioManager::VioManager(VioManagerOptions ¶ms_) : thread_init_running(false), thread_init_success(false)
构造函数,导入所有参数配置。
IMU数据传递
void VioManager::feed_measurement_imu(const ov_core::ImuData &message)
相机数据传递
void ov_msckf::VioManager::feed_measurement_camera(const ov_core::CameraData& message)
模拟数据传递
void ov_msckf::VioManager::feed_measurement_simulation(double timestamp,const std::vector& camids,const std::vector<std::vector<std::pair<size_t, Eigen::VectorXf>>>& feats)
同步模拟相机的数据传递。
图像数据传递跟踪
void VioManager::track_image_and_update(const ov_core::CameraData &message_const)
给定一组新的相机图像,这将跟踪它们。
如果我们有立体跟踪,我们应该调用立体跟踪函数。否则我们将尝试跟踪每个传递的图像。
特征传播与更新
void VioManager::do_feature_propagate_update(const ov_core::CameraData &message)
这将对状态进行传播和功能更新。
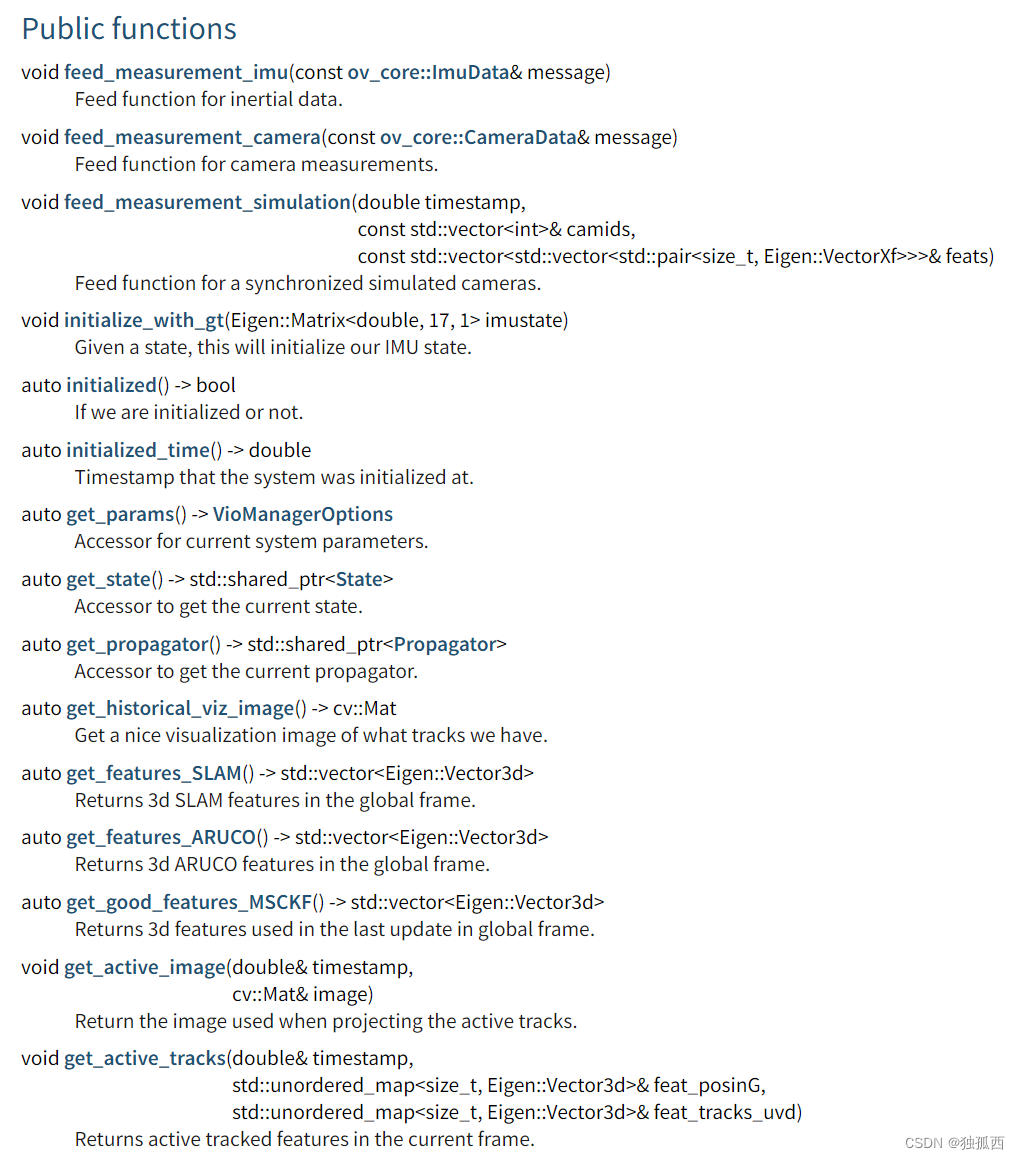
其他公共函数还有:
代码注释
/*
* OpenVINS: An Open Platform for Visual-Inertial Research
* Copyright (C) 2018-2023 Patrick Geneva
* Copyright (C) 2018-2023 Guoquan Huang
* Copyright (C) 2018-2023 OpenVINS Contributors
* Copyright (C) 2018-2019 Kevin Eckenhoff
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <https://www.gnu.org/licenses/>.
*/
#include "VioManager.h"
#include "feat/Feature.h"
#include "feat/FeatureDatabase.h"
#include "feat/FeatureInitializer.h"
#include "track/TrackAruco.h"
#include "track/TrackDescriptor.h"
#include "track/TrackKLT.h"
#include "track/TrackSIM.h"
#include "types/Landmark.h"
#include "types/LandmarkRepresentation.h"
#include "utils/opencv_lambda_body.h"
#include "utils/print.h"
#include "utils/sensor_data.h"
#include "init/InertialInitializer.h"
#include "state/Propagator.h"
#include "state/State.h"
#include "state/StateHelper.h"
#include "update/UpdaterMSCKF.h"
#include "update/UpdaterSLAM.h"
#include "update/UpdaterZeroVelocity.h"
using namespace ov_core;
using namespace ov_type;
using namespace ov_msckf;
VioManager::VioManager(VioManagerOptions ¶ms_) : thread_init_running(false), thread_init_success(false) {
// Nice startup message
PRINT_DEBUG("=======================================\n");
PRINT_DEBUG("OPENVINS ON-MANIFOLD EKF IS STARTING\n");
PRINT_DEBUG("=======================================\n");
// Nice debug
this->params = params_;
params.print_and_load_estimator();
params.print_and_load_noise();
params.print_and_load_state();
params.print_and_load_trackers();
// This will globally set the thread count we will use
// -1 will reset to the system default threading (usually the num of cores)
cv::setNumThreads(params.num_opencv_threads);//设置将要使用的线程数量
cv::setRNGSeed(0);
// Create the state!!
state = std::make_shared<State>(params.state_options);//将参数表的状态设置导入
// Set the IMU intrinsics,设置IMU内参
state->_calib_imu_dw->set_value(params.vec_dw);
state->_calib_imu_dw->set_fej(params.vec_dw);
state->_calib_imu_da->set_value(params.vec_da);
state->_calib_imu_da->set_fej(params.vec_da);
state->_calib_imu_tg->set_value(params.vec_tg);
state->_calib_imu_tg->set_fej(params.vec_tg);
state->_calib_imu_GYROtoIMU->set_value(params.q_GYROtoIMU);
state->_calib_imu_GYROtoIMU->set_fej(params.q_GYROtoIMU);
state->_calib_imu_ACCtoIMU->set_value(params.q_ACCtoIMU);
state->_calib_imu_ACCtoIMU->set_fej(params.q_ACCtoIMU);
// Timeoffset from camera to IMU,设置相机和IMU之间的外参
Eigen::VectorXd temp_camimu_dt;
temp_camimu_dt.resize(1);
temp_camimu_dt(0) = params.calib_camimu_dt;
state->_calib_dt_CAMtoIMU->set_value(temp_camimu_dt);
state->_calib_dt_CAMtoIMU->set_fej(temp_camimu_dt);
// Loop through and load each of the cameras,多个相机的时候循环导入参数
state->_cam_intrinsics_cameras = params.camera_intrinsics;
for (int i = 0; i < state->_options.num_cameras; i++) {
state->_cam_intrinsics.at(i)->set_value(params.camera_intrinsics.at(i)->get_value());
state->_cam_intrinsics.at(i)->set_fej(params.camera_intrinsics.at(i)->get_value());
state->_calib_IMUtoCAM.at(i)->set_value(params.camera_extrinsics.at(i));
state->_calib_IMUtoCAM.at(i)->set_fej(params.camera_extrinsics.at(i));
}
//===================================================================================
//===================================================================================
//===================================================================================
// If we are recording statistics, then open our file,如果记录统计数据则打开文件
if (params.record_timing_information) {
// If the file exists, then delete it,文件存在则删除
if (boost::filesystem::exists(params.record_timing_filepath)) {
boost::filesystem::remove(params.record_timing_filepath);
PRINT_INFO(YELLOW "[STATS]: found old file found, deleted...\n" RESET);
}
// Create the directory that we will open the file in,创建我们将要打开的文件在目标目录下
boost::filesystem::path p(params.record_timing_filepath);
boost::filesystem::create_directories(p.parent_path());
// Open our statistics file!
of_statistics.open(params.record_timing_filepath, std::ofstream::out | std::ofstream::app);//打开统计数据文件
// Write the header information into it
of_statistics << "# timestamp (sec),tracking,propagation,msckf update,";//写入头部信息
if (state->_options.max_slam_features > 0) {
of_statistics << "slam update,slam delayed,";
}
of_statistics << "re-tri & marg,total" << std::endl;
}
//===================================================================================
//===================================================================================
//===================================================================================
// Let's make a feature extractor
// NOTE: after we initialize we will increase the total number of feature tracks
// NOTE: we will split the total number of features over all cameras uniformly
//特征提取部分
// 注意:初始化后我们将增加特征跟踪的总数
// 注意:我们将统一划分所有相机的特征总数
int init_max_features = std::floor((double)params.init_options.init_max_features / (double)params.state_options.num_cameras);
if (params.use_klt) {
trackFEATS = std::shared_ptr<TrackBase>(new TrackKLT(state->_cam_intrinsics_cameras, init_max_features,
state->_options.max_aruco_features, params.use_stereo, params.histogram_method,
params.fast_threshold, params.grid_x, params.grid_y, params.min_px_dist));
} else {
trackFEATS = std::shared_ptr<TrackBase>(new TrackDescriptor(
state->_cam_intrinsics_cameras, init_max_features, state->_options.max_aruco_features, params.use_stereo, params.histogram_method,
params.fast_threshold, params.grid_x, params.grid_y, params.min_px_dist, params.knn_ratio));
}
// Initialize our aruco tag extractor
//创建aruco标签提取器
if (params.use_aruco) {
trackARUCO = std::shared_ptr<TrackBase>(new TrackAruco(state->_cam_intrinsics_cameras, state->_options.max_aruco_features,
params.use_stereo, params.histogram_method, params.downsize_aruco));
}
// Initialize our state propagator
//创建状态传播量
propagator = std::make_shared<Propagator>(params.imu_noises, params.gravity_mag);
// Our state initialize
//创建初始化量
initializer = std::make_shared<ov_init::InertialInitializer>(params.init_options, trackFEATS->get_feature_database());
// Make the updater!
//创建更新量
updaterMSCKF = std::make_shared<UpdaterMSCKF>(params.msckf_options, params.featinit_options);
updaterSLAM = std::make_shared<UpdaterSLAM>(params.slam_options, params.aruco_options, params.featinit_options);
// If we are using zero velocity updates, then create the updater
//如果使用零速矫正创建更新器
if (params.try_zupt) {
updaterZUPT = std::make_shared<UpdaterZeroVelocity>(params.zupt_options, params.imu_noises, trackFEATS->get_feature_database(),
propagator, params.gravity_mag, params.zupt_max_velocity,
params.zupt_noise_multiplier, params.zupt_max_disparity);
}
}
void VioManager::feed_measurement_imu(const ov_core::ImuData &message) {//IMU测量值的传递
// The oldest time we need IMU with is the last clone
// We shouldn't really need the whole window, but if we go backwards in time we will
// 我们需要 IMU 的最早时间是最后一个克隆
// 我们并不真的需要整个窗口,但如果我们及时倒退,我们就会需要
double oldest_time = state->margtimestep();
if (oldest_time > state->_timestamp) {
oldest_time = -1;
}
if (!is_initialized_vio) {
oldest_time = message.timestamp - params.init_options.init_window_time + state->_calib_dt_CAMtoIMU->value()(0) - 0.10;
}
propagator->feed_imu(message, oldest_time);
// Push back to our initializer
// 推回到我们的初始化器
if (!is_initialized_vio) {
initializer->feed_imu(message, oldest_time);
}
// Push back to the zero velocity updater if it is enabled
// No need to push back if we are just doing the zv-update at the begining and we have moved
// 如果启用则推回到零速度更新器
// 如果我们只是在开始时进行 zv-update 并且我们已经移动了,则无需推迟
if (is_initialized_vio && updaterZUPT != nullptr && (!params.zupt_only_at_beginning || !has_moved_since_zupt)) {
updaterZUPT->feed_imu(message, oldest_time);
}
}
void VioManager::feed_measurement_simulation(double timestamp, const std::vector<int> &camids,
const std::vector<std::vector<std::pair<size_t, Eigen::VectorXf>>> &feats) {
//模拟测量值的传递
// Start timing
rT1 = boost::posix_time::microsec_clock::local_time();//开始时间
// Check if we actually have a simulated tracker
// If not, recreate and re-cast the tracker to our simulation tracker
// 检查我们是否真的有一个模拟跟踪器
// 如果没有,则重新创建跟踪器并将其重新投射到我们的模拟跟踪器
std::shared_ptr<TrackSIM> trackSIM = std::dynamic_pointer_cast<TrackSIM>(trackFEATS);
if (trackSIM == nullptr) {
// Replace with the simulated tracker
// 替换为模拟跟踪器
trackSIM = std::make_shared<TrackSIM>(state->_cam_intrinsics_cameras, state->_options.max_aruco_features);
trackFEATS = trackSIM;
// Need to also replace it in init and zv-upt since it points to the trackFEATS db pointer
// 还需要在 init 和 zv-upt 中替换它,因为它指向 trackFEATS db 指针
initializer = std::make_shared<ov_init::InertialInitializer>(params.init_options, trackFEATS->get_feature_database());
if (params.try_zupt) {
updaterZUPT = std::make_shared<UpdaterZeroVelocity>(params.zupt_options, params.imu_noises, trackFEATS->get_feature_database(),
propagator, params.gravity_mag, params.zupt_max_velocity,
params.zupt_noise_multiplier, params.zupt_max_disparity);
}
PRINT_WARNING(RED "[SIM]: casting our tracker to a TrackSIM object!\n" RESET);
}
// Feed our simulation tracker
//给模拟跟踪器传递信息
trackSIM->feed_measurement_simulation(timestamp, camids, feats);
rT2 = boost::posix_time::microsec_clock::local_time();
// Check if we should do zero-velocity, if so update the state with it
// Note that in the case that we only use in the beginning initialization phase
// If we have since moved, then we should never try to do a zero velocity update!
// 检查我们是否应该进行零速度,如果是,则用它更新状态
// 注意,我们只在开始初始化阶段使用的情况
// 如果我们已经移动,那么我们永远不应该尝试进行零速度更新!
if (is_initialized_vio && updaterZUPT != nullptr && (!params.zupt_only_at_beginning || !has_moved_since_zupt)) {
// If the same state time, use the previous timestep decision
// 如果状态时间相同,则使用前一个时间步决策
if (state->_timestamp != timestamp) {
did_zupt_update = updaterZUPT->try_update(state, timestamp);
}
if (did_zupt_update) {
assert(state->_timestamp == timestamp);
propagator->clean_old_imu_measurements(timestamp + state->_calib_dt_CAMtoIMU->value()(0) - 0.10);
updaterZUPT->clean_old_imu_measurements(timestamp + state->_calib_dt_CAMtoIMU->value()(0) - 0.10);
propagator->invalidate_cache();
return;
}
}
// If we do not have VIO initialization, then return an error
// 如果我们没有VIO初始化,则返回错误
if (!is_initialized_vio) {
PRINT_ERROR(RED "[SIM]: your vio system should already be initialized before simulating features!!!\n" RESET);
PRINT_ERROR(RED "[SIM]: initialize your system first before calling feed_measurement_simulation()!!!!\n" RESET);
std::exit(EXIT_FAILURE);
}
// Call on our propagate and update function
// Simulation is either all sync, or single camera...
// 调用我们的传播和更新函数
// 模拟要么是全同步的,要么是单相机的...
ov_core::CameraData message;
message.timestamp = timestamp;
for (auto const &camid : camids) {
int width = state->_cam_intrinsics_cameras.at(camid)->w();
int height = state->_cam_intrinsics_cameras.at(camid)->h();
message.sensor_ids.push_back(camid);
message.images.push_back(cv::Mat::zeros(cv::Size(width, height), CV_8UC1));
message.masks.push_back(cv::Mat::zeros(cv::Size(width, height), CV_8UC1));
}
do_feature_propagate_update(message);
}
void VioManager::track_image_and_update(const ov_core::CameraData &message_const) {//图像跟踪并更新
// Start timing
rT1 = boost::posix_time::microsec_clock::local_time();//开始计时
// Assert we have valid measurement data and ids
//保障是有效的测量数据和标号
assert(!message_const.sensor_ids.empty());
assert(message_const.sensor_ids.size() == message_const.images.size());
for (size_t i = 0; i < message_const.sensor_ids.size() - 1; i++) {
assert(message_const.sensor_ids.at(i) != message_const.sensor_ids.at(i + 1));
}
// Downsample if we are downsampling
//如果我们正在下采样,则下采样
ov_core::CameraData message = message_const;
for (size_t i = 0; i < message.sensor_ids.size() && params.downsample_cameras; i++) {
cv::Mat img = message.images.at(i);
cv::Mat mask = message.masks.at(i);
cv::Mat img_temp, mask_temp;
cv::pyrDown(img, img_temp, cv::Size(img.cols / 2.0, img.rows / 2.0));
message.images.at(i) = img_temp;
cv::pyrDown(mask, mask_temp, cv::Size(mask.cols / 2.0, mask.rows / 2.0));
message.masks.at(i) = mask_temp;
}
// Perform our feature tracking!
// 执行我们的特征跟踪!
trackFEATS->feed_new_camera(message);
// If the aruco tracker is available, the also pass to it
// NOTE: binocular tracking for aruco doesn't make sense as we by default have the ids
// NOTE: thus we just call the stereo tracking if we are doing binocular!
// 如果 aruco 跟踪器可用,也会传递给它
// 注意:aruco 的双目跟踪没有意义,因为我们默认有 ids
// 注意:因此,如果我们进行双目观察,我们只需调用立体跟踪!
if (is_initialized_vio && trackARUCO != nullptr) {
trackARUCO->feed_new_camera(message);
}
rT2 = boost::posix_time::microsec_clock::local_time();
// Check if we should do zero-velocity, if so update the state with it
// Note that in the case that we only use in the beginning initialization phase
// If we have since moved, then we should never try to do a zero velocity update!
// 检查我们是否应该进行零速度,如果是,则用它更新状态
// 注意,我们只在开始初始化阶段使用的情况
// 如果我们已经移动,那么我们永远不应该尝试进行零速度更新!
if (is_initialized_vio && updaterZUPT != nullptr && (!params.zupt_only_at_beginning || !has_moved_since_zupt)) {
// If the same state time, use the previous timestep decision
// 如果状态时间相同,则使用前一个时间步决策
if (state->_timestamp != message.timestamp) {
did_zupt_update = updaterZUPT->try_update(state, message.timestamp);
}
if (did_zupt_update) {
assert(state->_timestamp == message.timestamp);
propagator->clean_old_imu_measurements(message.timestamp + state->_calib_dt_CAMtoIMU->value()(0) - 0.10);
updaterZUPT->clean_old_imu_measurements(message.timestamp + state->_calib_dt_CAMtoIMU->value()(0) - 0.10);
propagator->invalidate_cache();
return;
}
}
// If we do not have VIO initialization, then try to initialize
// TODO: Or if we are trying to reset the system, then do that here!
// 如果我们没有VIO初始化,那么尝试初始化
// TODO:或者如果我们尝试重置系统,请在此处执行此操作!
if (!is_initialized_vio) {
is_initialized_vio = try_to_initialize(message);
if (!is_initialized_vio) {
double time_track = (rT2 - rT1).total_microseconds() * 1e-6;
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for tracking\n" RESET, time_track);
return;
}
}
// Call on our propagate and update function
// 调用我们的传播和更新函数
do_feature_propagate_update(message);
}
void VioManager::do_feature_propagate_update(const ov_core::CameraData &message) {//特征传播与更新
//===================================================================================
// State propagation, and clone augmentation
//===================================================================================
// 状态传播和克隆扩维
// Return if the camera measurement is out of order
//如果相机测量超过数量则返回
if (state->_timestamp > message.timestamp) {
PRINT_WARNING(YELLOW "image received out of order, unable to do anything (prop dt = %3f)\n" RESET,
(message.timestamp - state->_timestamp));
return;
}
// Propagate the state forward to the current update time
// Also augment it with a new clone!
// NOTE: if the state is already at the given time (can happen in sim)
// NOTE: then no need to prop since we already are at the desired timestep
// 将状态向前传播到当前更新时间
// 还用一个新的克隆来增强它!
// 注意:如果状态已经在给定时间(可能发生在 sim 中)
// 注意:那么不需要支撑,因为我们已经处于所需的时间步长
if (state->_timestamp != message.timestamp) {
propagator->propagate_and_clone(state, message.timestamp);
}
rT3 = boost::posix_time::microsec_clock::local_time();
// If we have not reached max clones, we should just return...
// This isn't super ideal, but it keeps the logic after this easier...
// We can start processing things when we have at least 5 clones since we can start triangulating things...
// 如果我们还没有达到最大克隆数,我们应该返回...
// 这不是非常理想,但它使之后的逻辑更容易......
// 当我们有至少 5 个克隆时,我们可以开始处理事物,因为我们可以开始对事物进行三角测量...
if ((int)state->_clones_IMU.size() < std::min(state->_options.max_clone_size, 5)) {
PRINT_DEBUG("waiting for enough clone states (%d of %d)....\n", (int)state->_clones_IMU.size(),
std::min(state->_options.max_clone_size, 5));
return;
}
// Return if we where unable to propagate
// 如果我们无法传播则返回
if (state->_timestamp != message.timestamp) {
PRINT_WARNING(RED "[PROP]: Propagator unable to propagate the state forward in time!\n" RESET);
PRINT_WARNING(RED "[PROP]: It has been %.3f since last time we propagated\n" RESET, message.timestamp - state->_timestamp);
return;
}
has_moved_since_zupt = true;
//===================================================================================
// MSCKF features and KLT tracks that are SLAM features
//===================================================================================
//MSCKF特征和KLT跟踪SLAM特征
// Now, lets get all features that should be used for an update that are lost in the newest frame
// We explicitly request features that have not been deleted (used) in another update step
// 现在,让我们获取应该用于更新但在最新帧中丢失的所有特征
// 我们明确请求在另一个更新步骤中尚未删除(使用)的功能
std::vector<std::shared_ptr<Feature>> feats_lost, feats_marg, feats_slam;
feats_lost = trackFEATS->get_feature_database()->features_not_containing_newer(state->_timestamp, false, true);
// Don't need to get the oldest features until we reach our max number of clones
//不需要获得最旧的特征,知道我们到达克隆的最大数量
if ((int)state->_clones_IMU.size() > state->_options.max_clone_size || (int)state->_clones_IMU.size() > 5) {
feats_marg = trackFEATS->get_feature_database()->features_containing(state->margtimestep(), false, true);
if (trackARUCO != nullptr && message.timestamp - startup_time >= params.dt_slam_delay) {
feats_slam = trackARUCO->get_feature_database()->features_containing(state->margtimestep(), false, true);
}
}
// Remove any lost features that were from other image streams
// E.g: if we are cam1 and cam0 has not processed yet, we don't want to try to use those in the update yet
// E.g: thus we wait until cam0 process its newest image to remove features which were seen from that camera
//删除其他图像流中丢失的所有特征
// 例如:如果我们的 cam1 和 cam0 尚未处理,我们还不想在更新中尝试使用它们
// 例如:因此我们等到 cam0 处理其最新图像以删除从该相机看到的特征
auto it1 = feats_lost.begin();
while (it1 != feats_lost.end()) {
bool found_current_message_camid = false;
for (const auto &camuvpair : (*it1)->uvs) {
if (std::find(message.sensor_ids.begin(), message.sensor_ids.end(), camuvpair.first) != message.sensor_ids.end()) {
found_current_message_camid = true;
break;
}
}
if (found_current_message_camid) {
it1++;
} else {
it1 = feats_lost.erase(it1);
}
}
// We also need to make sure that the max tracks does not contain any lost features
// This could happen if the feature was lost in the last frame, but has a measurement at the marg timestep
// 我们还需要确保最大轨道不包含任何丢失的特征
// 如果该特征在最后一帧中丢失,但在 Marg 时间步长处有测量,则可能会发生这种情况
it1 = feats_lost.begin();
while (it1 != feats_lost.end()) {
if (std::find(feats_marg.begin(), feats_marg.end(), (*it1)) != feats_marg.end()) {
// PRINT_WARNING(YELLOW "FOUND FEATURE THAT WAS IN BOTH feats_lost and feats_marg!!!!!!\n" RESET);
it1 = feats_lost.erase(it1);
} else {
it1++;
}
}
// Find tracks that have reached max length, these can be made into SLAM features
// 找到已经达到最大长度的轨迹,这些可以制作成SLAM特征
std::vector<std::shared_ptr<Feature>> feats_maxtracks;
auto it2 = feats_marg.begin();
while (it2 != feats_marg.end()) {
// See if any of our camera's reached max track
//查看是否有我们的相机达到最大跟踪
bool reached_max = false;
for (const auto &cams : (*it2)->timestamps) {
if ((int)cams.second.size() > state->_options.max_clone_size) {
reached_max = true;
break;
}
}
// If max track, then add it to our possible slam feature list
//如果是最大跟踪则将他加入到我们可能的slam特征列表
if (reached_max) {
feats_maxtracks.push_back(*it2);
it2 = feats_marg.erase(it2);
} else {
it2++;
}
}
// Count how many aruco tags we have in our state
//计数在我们的状态中有多少aruco标签
int curr_aruco_tags = 0;
auto it0 = state->_features_SLAM.begin();
while (it0 != state->_features_SLAM.end()) {
if ((int)(*it0).second->_featid <= 4 * state->_options.max_aruco_features)
curr_aruco_tags++;
it0++;
}
// Append a new SLAM feature if we have the room to do so
// Also check that we have waited our delay amount (normally prevents bad first set of slam points)
// 如果我们有空间的话,添加一个新的 SLAM 功能
// 还要检查我们是否已经等待了延迟量(通常可以防止第一组猛击点出现问题)
if (state->_options.max_slam_features > 0 && message.timestamp - startup_time >= params.dt_slam_delay &&
(int)state->_features_SLAM.size() < state->_options.max_slam_features + curr_aruco_tags) {
// Get the total amount to add, then the max amount that we can add given our marginalize feature array
// 获取要添加的总量,然后是给定边缘化特征数组时我们可以添加的最大数量
int amount_to_add = (state->_options.max_slam_features + curr_aruco_tags) - (int)state->_features_SLAM.size();
int valid_amount = (amount_to_add > (int)feats_maxtracks.size()) ? (int)feats_maxtracks.size() : amount_to_add;
// If we have at least 1 that we can add, lets add it!
// Note: we remove them from the feat_marg array since we don't want to reuse information...
// 如果我们至少有 1 个可以添加,就添加它!
// 注意:我们从 feat_marg 数组中删除它们,因为我们不想重用信息...
if (valid_amount > 0) {
feats_slam.insert(feats_slam.end(), feats_maxtracks.end() - valid_amount, feats_maxtracks.end());
feats_maxtracks.erase(feats_maxtracks.end() - valid_amount, feats_maxtracks.end());
}
}
// Loop through current SLAM features, we have tracks of them, grab them for this update!
// NOTE: if we have a slam feature that has lost tracking, then we should marginalize it out
// NOTE: we only enforce this if the current camera message is where the feature was seen from
// NOTE: if you do not use FEJ, these types of slam features *degrade* the estimator performance....
// NOTE: we will also marginalize SLAM features if they have failed their update a couple times in a row
// 循环当前的 SLAM 功能,我们有它们的踪迹,抓住它们进行这次更新!
// 注意:如果我们有一个失去跟踪的 slam 功能,那么我们应该将其边缘化
// 注意:如果当前相机消息是从其中看到该功能的位置,我们只会强制执行此操作
// 注意:如果您不使用 FEJ,这些类型的 slam 功能会*降低*估计器的性能......
// 注意:如果 SLAM 功能连续几次更新失败,我们也会将其边缘化
for (std::pair<const size_t, std::shared_ptr<Landmark>> &landmark : state->_features_SLAM) {
if (trackARUCO != nullptr) {
std::shared_ptr<Feature> feat1 = trackARUCO->get_feature_database()->get_feature(landmark.second->_featid);
if (feat1 != nullptr)
feats_slam.push_back(feat1);
}
std::shared_ptr<Feature> feat2 = trackFEATS->get_feature_database()->get_feature(landmark.second->_featid);
if (feat2 != nullptr)
feats_slam.push_back(feat2);
assert(landmark.second->_unique_camera_id != -1);
bool current_unique_cam =
std::find(message.sensor_ids.begin(), message.sensor_ids.end(), landmark.second->_unique_camera_id) != message.sensor_ids.end();
if (feat2 == nullptr && current_unique_cam)
landmark.second->should_marg = true;
if (landmark.second->update_fail_count > 1)
landmark.second->should_marg = true;
}
// Lets marginalize out all old SLAM features here
// These are ones that where not successfully tracked into the current frame
// We do *NOT* marginalize out our aruco tags landmarks
// 让我们在这里边缘化所有旧的 SLAM 功能
// 这些是未成功跟踪到当前帧的帧
// 我们*不*边缘化我们的aruco标签地标
StateHelper::marginalize_slam(state);
// Separate our SLAM features into new ones, and old ones
//将我们的SLAM特征分为新的和旧的
std::vector<std::shared_ptr<Feature>> feats_slam_DELAYED, feats_slam_UPDATE;
for (size_t i = 0; i < feats_slam.size(); i++) {
if (state->_features_SLAM.find(feats_slam.at(i)->featid) != state->_features_SLAM.end()) {
feats_slam_UPDATE.push_back(feats_slam.at(i));
// PRINT_DEBUG("[UPDATE-SLAM]: found old feature %d (%d
// measurements)\n",(int)feats_slam.at(i)->featid,(int)feats_slam.at(i)->timestamps_left.size());
} else {
feats_slam_DELAYED.push_back(feats_slam.at(i));
// PRINT_DEBUG("[UPDATE-SLAM]: new feature ready %d (%d
// measurements)\n",(int)feats_slam.at(i)->featid,(int)feats_slam.at(i)->timestamps_left.size());
}
}
// Concatenate our MSCKF feature arrays (i.e., ones not being used for slam updates)
//连接我们的MSCKF特征数组
std::vector<std::shared_ptr<Feature>> featsup_MSCKF = feats_lost;
featsup_MSCKF.insert(featsup_MSCKF.end(), feats_marg.begin(), feats_marg.end());
featsup_MSCKF.insert(featsup_MSCKF.end(), feats_maxtracks.begin(), feats_maxtracks.end());
//===================================================================================
// Now that we have a list of features, lets do the EKF update for MSCKF and SLAM!
//===================================================================================
//现在我们有了一系列特征,接着做MSCKF和SLAM 的EKF更新
// Sort based on track length
// TODO: we should have better selection logic here (i.e. even feature distribution in the FOV etc..)
// TODO: right now features that are "lost" are at the front of this vector, while ones at the end are long-tracks
// 根据轨道长度排序
// TODO:我们应该在这里有更好的选择逻辑(即,FOV 中的特征分布等)
// TODO:现在“丢失”的特征位于该向量的前面,而末尾的特征是长轨道
auto compare_feat = [](const std::shared_ptr<Feature> &a, const std::shared_ptr<Feature> &b) -> bool {
size_t asize = 0;
size_t bsize = 0;
for (const auto &pair : a->timestamps)
asize += pair.second.size();
for (const auto &pair : b->timestamps)
bsize += pair.second.size();
return asize < bsize;
};
std::sort(featsup_MSCKF.begin(), featsup_MSCKF.end(), compare_feat);
// Pass them to our MSCKF updater
// NOTE: if we have more then the max, we select the "best" ones (i.e. max tracks) for this update
// NOTE: this should only really be used if you want to track a lot of features, or have limited computational resources
// 将它们传递给我们的 MSCKF 更新程序
// 注意:如果我们有比最大还多的,我们会选择“最佳”(即最大跟踪)进行此更新
// 注意:只有当您想要跟踪大量特征或计算资源有限时才应该使用此方法
if ((int)featsup_MSCKF.size() > state->_options.max_msckf_in_update)
featsup_MSCKF.erase(featsup_MSCKF.begin(), featsup_MSCKF.end() - state->_options.max_msckf_in_update);
updaterMSCKF->update(state, featsup_MSCKF);
propagator->invalidate_cache();
rT4 = boost::posix_time::microsec_clock::local_time();
// Perform SLAM delay init and update
// NOTE: that we provide the option here to do a *sequential* update
// NOTE: this will be a lot faster but won't be as accurate.
// 执行SLAM延迟初始化和更新
// 注意:我们在这里提供了执行*顺序*更新的选项
// 注意:这会快得多,但不会那么准确。
std::vector<std::shared_ptr<Feature>> feats_slam_UPDATE_TEMP;
while (!feats_slam_UPDATE.empty()) {
// Get sub vector of the features we will update with
//得到我们要更新的特征子向量
std::vector<std::shared_ptr<Feature>> featsup_TEMP;
featsup_TEMP.insert(featsup_TEMP.begin(), feats_slam_UPDATE.begin(),
feats_slam_UPDATE.begin() + std::min(state->_options.max_slam_in_update, (int)feats_slam_UPDATE.size()));
feats_slam_UPDATE.erase(feats_slam_UPDATE.begin(),
feats_slam_UPDATE.begin() + std::min(state->_options.max_slam_in_update, (int)feats_slam_UPDATE.size()));
// Do the update
//做更新
updaterSLAM->update(state, featsup_TEMP);
feats_slam_UPDATE_TEMP.insert(feats_slam_UPDATE_TEMP.end(), featsup_TEMP.begin(), featsup_TEMP.end());
propagator->invalidate_cache();
}
feats_slam_UPDATE = feats_slam_UPDATE_TEMP;
rT5 = boost::posix_time::microsec_clock::local_time();
updaterSLAM->delayed_init(state, feats_slam_DELAYED);
rT6 = boost::posix_time::microsec_clock::local_time();
//===================================================================================
// Update our visualization feature set, and clean up the old features
//===================================================================================
//更新我们的可视化特征集并清除旧的特征
// Re-triangulate all current tracks in the current frame
//对于当前帧下所有目前跟踪进行重新三角化
if (message.sensor_ids.at(0) == 0) {
// Re-triangulate features
retriangulate_active_tracks(message);//特征重新三角化
// Clear the MSCKF features only on the base camera
// Thus we should be able to visualize the other unique camera stream
// MSCKF features as they will also be appended to the vector
// 仅清除基础相机上的 MSCKF 特征
// 因此我们应该能够可视化其他独特的相机流
// MSCKF 特征,因为它们也将被附加到向量中
good_features_MSCKF.clear();
}
// Save all the MSCKF features used in the update
//保存更新中使用的所有 MSCKF 功能
for (auto const &feat : featsup_MSCKF) {
good_features_MSCKF.push_back(feat->p_FinG);
feat->to_delete = true;
}
//===================================================================================
// Cleanup, marginalize out what we don't need any more...
//===================================================================================
//清理,边缘化我们不再需要的东西......
// Remove features that where used for the update from our extractors at the last timestep
// This allows for measurements to be used in the future if they failed to be used this time
// Note we need to do this before we feed a new image, as we want all new measurements to NOT be deleted
// 在最后一个时间步从提取器中删除用于更新的特征
// 如果这次未能使用,这允许将来使用测量值
// 请注意,我们需要在提供新图像之前执行此操作,因为我们希望不删除所有新测量值
trackFEATS->get_feature_database()->cleanup();
if (trackARUCO != nullptr) {
trackARUCO->get_feature_database()->cleanup();
}
// First do anchor change if we are about to lose an anchor pose
// 如果我们即将失去锚点姿态,首先进行锚点更改
updaterSLAM->change_anchors(state);
// Cleanup any features older than the marginalization time
//清楚所有比边缘化时间早的特征
if ((int)state->_clones_IMU.size() > state->_options.max_clone_size) {
trackFEATS->get_feature_database()->cleanup_measurements(state->margtimestep());
if (trackARUCO != nullptr) {
trackARUCO->get_feature_database()->cleanup_measurements(state->margtimestep());
}
}
// Finally marginalize the oldest clone if needed
// 如果需要的话,最后边缘化最旧的克隆
StateHelper::marginalize_old_clone(state);
rT7 = boost::posix_time::microsec_clock::local_time();
//===================================================================================
// Debug info, and stats tracking
//===================================================================================
//调试信息和统计跟踪
// Get timing statitics information
//获取时序统计信息
double time_track = (rT2 - rT1).total_microseconds() * 1e-6;
double time_prop = (rT3 - rT2).total_microseconds() * 1e-6;
double time_msckf = (rT4 - rT3).total_microseconds() * 1e-6;
double time_slam_update = (rT5 - rT4).total_microseconds() * 1e-6;
double time_slam_delay = (rT6 - rT5).total_microseconds() * 1e-6;
double time_marg = (rT7 - rT6).total_microseconds() * 1e-6;
double time_total = (rT7 - rT1).total_microseconds() * 1e-6;
// Timing information
//时序信息
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for tracking\n" RESET, time_track);
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for propagation\n" RESET, time_prop);
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for MSCKF update (%d feats)\n" RESET, time_msckf, (int)featsup_MSCKF.size());
if (state->_options.max_slam_features > 0) {
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for SLAM update (%d feats)\n" RESET, time_slam_update, (int)state->_features_SLAM.size());
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for SLAM delayed init (%d feats)\n" RESET, time_slam_delay, (int)feats_slam_DELAYED.size());
}
PRINT_DEBUG(BLUE "[TIME]: %.4f seconds for re-tri & marg (%d clones in state)\n" RESET, time_marg, (int)state->_clones_IMU.size());
std::stringstream ss;
ss << "[TIME]: " << std::setprecision(4) << time_total << " seconds for total (camera";
for (const auto &id : message.sensor_ids) {
ss << " " << id;
}
ss << ")" << std::endl;
PRINT_DEBUG(BLUE "%s" RESET, ss.str().c_str());
// Finally if we are saving stats to file, lets save it to file
//最后,如果我们将统计数据保存到文件,让我们将其保存到文件
if (params.record_timing_information && of_statistics.is_open()) {
// We want to publish in the IMU clock frame
// The timestamp in the state will be the last camera time
// 我们要在 IMU 时钟帧中发布
// 状态中的时间戳将是最后一个相机时间
double t_ItoC = state->_calib_dt_CAMtoIMU->value()(0);
double timestamp_inI = state->_timestamp + t_ItoC;
// Append to the file
// 追加到文件
of_statistics << std::fixed << std::setprecision(15) << timestamp_inI << "," << std::fixed << std::setprecision(5) << time_track << ","
<< time_prop << "," << time_msckf << ",";
if (state->_options.max_slam_features > 0) {
of_statistics << time_slam_update << "," << time_slam_delay << ",";
}
of_statistics << time_marg << "," << time_total << std::endl;
of_statistics.flush();
}
// Update our distance traveled
// 更新我们行驶的距离
if (timelastupdate != -1 && state->_clones_IMU.find(timelastupdate) != state->_clones_IMU.end()) {
Eigen::Matrix<double, 3, 1> dx = state->_imu->pos() - state->_clones_IMU.at(timelastupdate)->pos();
distance += dx.norm();
}
timelastupdate = message.timestamp;
// Debug, print our current state
PRINT_INFO("q_GtoI = %.3f,%.3f,%.3f,%.3f | p_IinG = %.3f,%.3f,%.3f | dist = %.2f (meters)\n", state->_imu->quat()(0),
state->_imu->quat()(1), state->_imu->quat()(2), state->_imu->quat()(3), state->_imu->pos()(0), state->_imu->pos()(1),
state->_imu->pos()(2), distance);
PRINT_INFO("bg = %.4f,%.4f,%.4f | ba = %.4f,%.4f,%.4f\n", state->_imu->bias_g()(0), state->_imu->bias_g()(1), state->_imu->bias_g()(2),
state->_imu->bias_a()(0), state->_imu->bias_a()(1), state->_imu->bias_a()(2));
// Debug for camera imu offset
if (state->_options.do_calib_camera_timeoffset) {
PRINT_INFO("camera-imu timeoffset = %.5f\n", state->_calib_dt_CAMtoIMU->value()(0));
}
// Debug for camera intrinsics
if (state->_options.do_calib_camera_intrinsics) {
for (int i = 0; i < state->_options.num_cameras; i++) {
std::shared_ptr<Vec> calib = state->_cam_intrinsics.at(i);
PRINT_INFO("cam%d intrinsics = %.3f,%.3f,%.3f,%.3f | %.3f,%.3f,%.3f,%.3f\n", (int)i, calib->value()(0), calib->value()(1),
calib->value()(2), calib->value()(3), calib->value()(4), calib->value()(5), calib->value()(6), calib->value()(7));
}
}
// Debug for camera extrinsics
if (state->_options.do_calib_camera_pose) {
for (int i = 0; i < state->_options.num_cameras; i++) {
std::shared_ptr<PoseJPL> calib = state->_calib_IMUtoCAM.at(i);
PRINT_INFO("cam%d extrinsics = %.3f,%.3f,%.3f,%.3f | %.3f,%.3f,%.3f\n", (int)i, calib->quat()(0), calib->quat()(1), calib->quat()(2),
calib->quat()(3), calib->pos()(0), calib->pos()(1), calib->pos()(2));
}
}
// Debug for imu intrinsics
if (state->_options.do_calib_imu_intrinsics && state->_options.imu_model == StateOptions::ImuModel::KALIBR) {
PRINT_INFO("q_GYROtoI = %.3f,%.3f,%.3f,%.3f\n", state->_calib_imu_GYROtoIMU->value()(0), state->_calib_imu_GYROtoIMU->value()(1),
state->_calib_imu_GYROtoIMU->value()(2), state->_calib_imu_GYROtoIMU->value()(3));
}
if (state->_options.do_calib_imu_intrinsics && state->_options.imu_model == StateOptions::ImuModel::RPNG) {
PRINT_INFO("q_ACCtoI = %.3f,%.3f,%.3f,%.3f\n", state->_calib_imu_ACCtoIMU->value()(0), state->_calib_imu_ACCtoIMU->value()(1),
state->_calib_imu_ACCtoIMU->value()(2), state->_calib_imu_ACCtoIMU->value()(3));
}
if (state->_options.do_calib_imu_intrinsics && state->_options.imu_model == StateOptions::ImuModel::KALIBR) {
PRINT_INFO("Dw = | %.4f,%.4f,%.4f | %.4f,%.4f | %.4f |\n", state->_calib_imu_dw->value()(0), state->_calib_imu_dw->value()(1),
state->_calib_imu_dw->value()(2), state->_calib_imu_dw->value()(3), state->_calib_imu_dw->value()(4),
state->_calib_imu_dw->value()(5));
PRINT_INFO("Da = | %.4f,%.4f,%.4f | %.4f,%.4f | %.4f |\n", state->_calib_imu_da->value()(0), state->_calib_imu_da->value()(1),
state->_calib_imu_da->value()(2), state->_calib_imu_da->value()(3), state->_calib_imu_da->value()(4),
state->_calib_imu_da->value()(5));
}
if (state->_options.do_calib_imu_intrinsics && state->_options.imu_model == StateOptions::ImuModel::RPNG) {
PRINT_INFO("Dw = | %.4f | %.4f,%.4f | %.4f,%.4f,%.4f |\n", state->_calib_imu_dw->value()(0), state->_calib_imu_dw->value()(1),
state->_calib_imu_dw->value()(2), state->_calib_imu_dw->value()(3), state->_calib_imu_dw->value()(4),
state->_calib_imu_dw->value()(5));
PRINT_INFO("Da = | %.4f | %.4f,%.4f | %.4f,%.4f,%.4f |\n", state->_calib_imu_da->value()(0), state->_calib_imu_da->value()(1),
state->_calib_imu_da->value()(2), state->_calib_imu_da->value()(3), state->_calib_imu_da->value()(4),
state->_calib_imu_da->value()(5));
}
if (state->_options.do_calib_imu_intrinsics && state->_options.do_calib_imu_g_sensitivity) {
PRINT_INFO("Tg = | %.4f,%.4f,%.4f | %.4f,%.4f,%.4f | %.4f,%.4f,%.4f |\n", state->_calib_imu_tg->value()(0),
state->_calib_imu_tg->value()(1), state->_calib_imu_tg->value()(2), state->_calib_imu_tg->value()(3),
state->_calib_imu_tg->value()(4), state->_calib_imu_tg->value()(5), state->_calib_imu_tg->value()(6),
state->_calib_imu_tg->value()(7), state->_calib_imu_tg->value()(8));
}
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- RT-DETR优化改进:IoU系列篇 | Focaler-IoU???????更加聚焦的IoU损失Focaler-IoU |2024年最新发表
- 【IC前端虚拟项目】MVU子模块DS文档编写与注意事项
- 闲鱼:养兵千日,用在一时
- vue2-使用axios获取外网ip
- openCv + python学习;阶段性回顾与总结 PS:基于 试验代码 进行回顾
- 6.1 常见集合和应用
- 详解 MySql InnoDB 的 MVCC 实现机制
- 跳格子3 (75%用例)C卷
- IaC基础设施即代码:Terraform 连接 alicloud OSS 实现多资源管理
- 如何解决海量数据的问题