【Pytorch】学习记录分享6——PyTorch经典网络 ResNet与手写体识别
发布时间:2023年12月21日
【Pytorch】学习记录分享5——PyTorch经典网络 ResNet
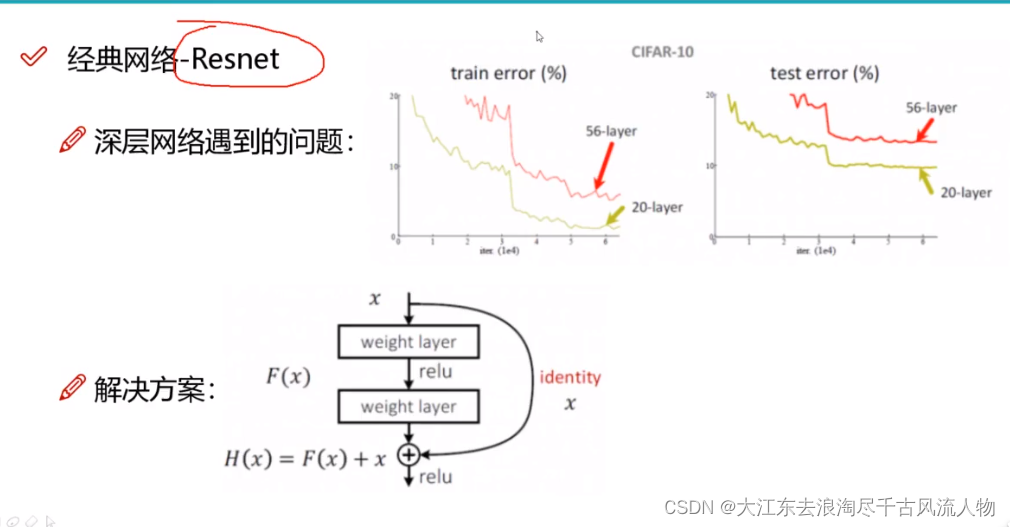
1. ResNet (残差网络)基础知识
图1 56层error比20层error高,提出ResNet (残差网络)的方案
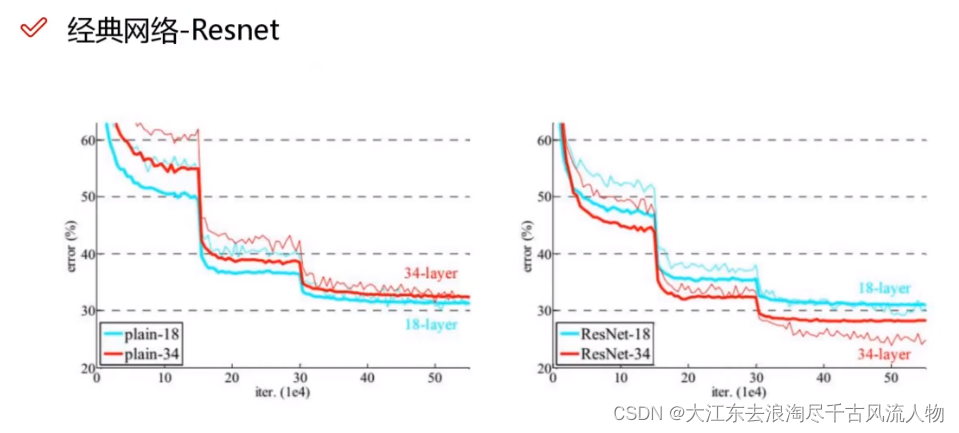
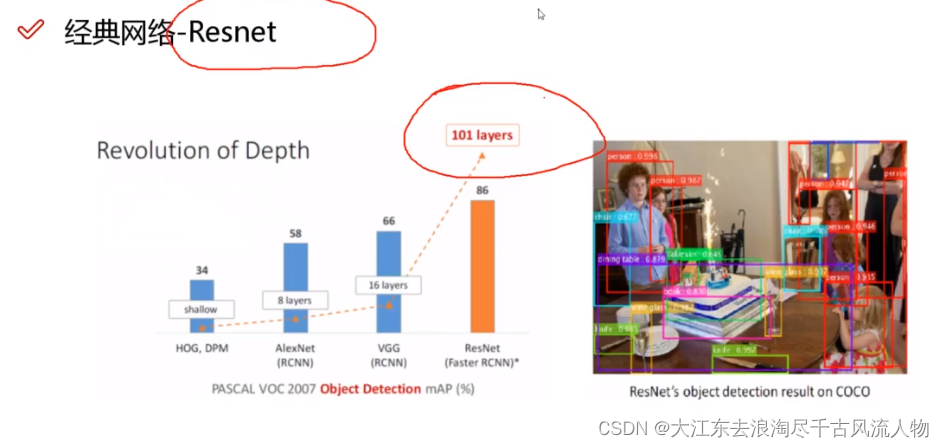
网络效果:
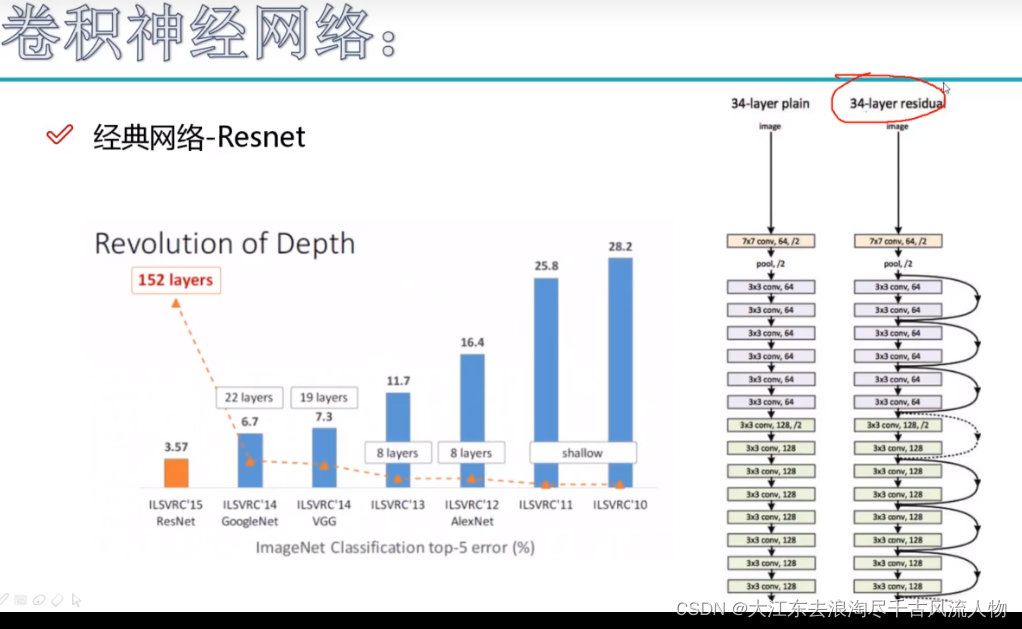
网络结构:
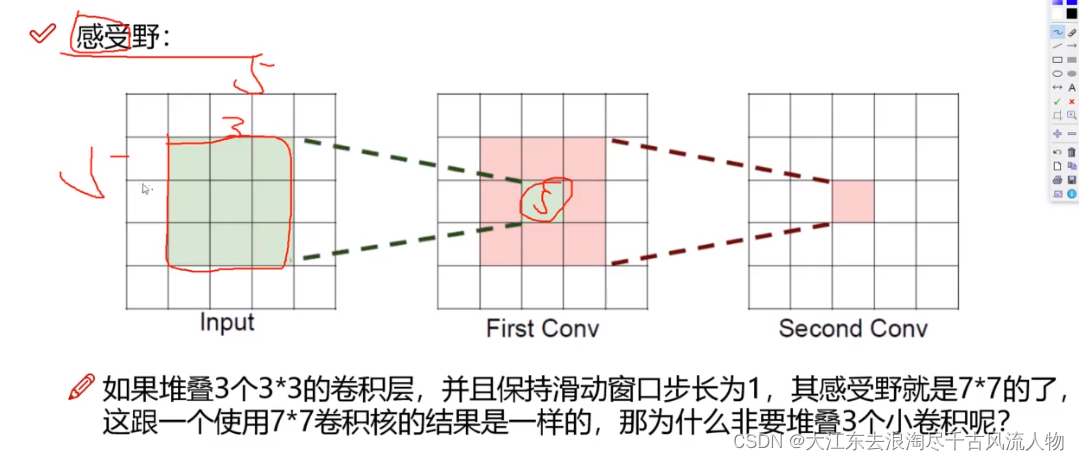
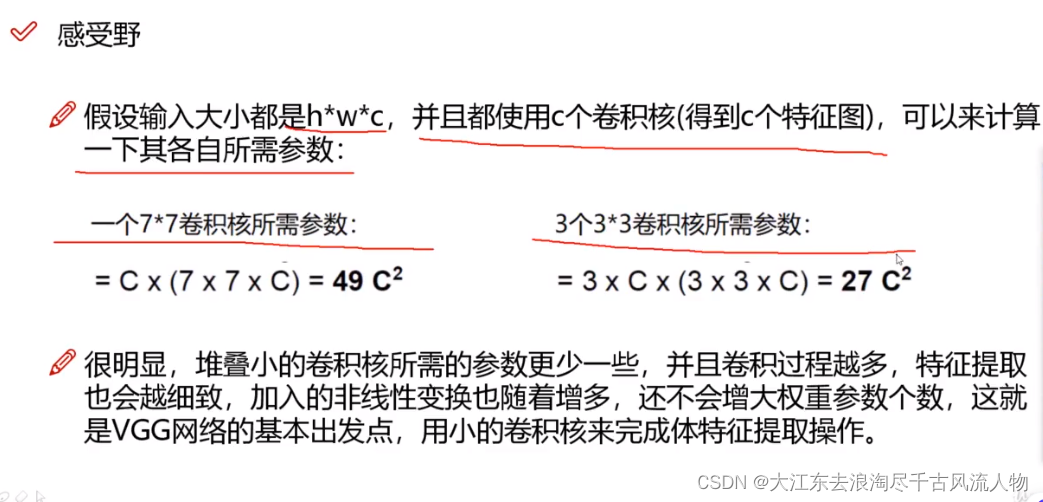
2. 感受野
3. 手写体数字识别
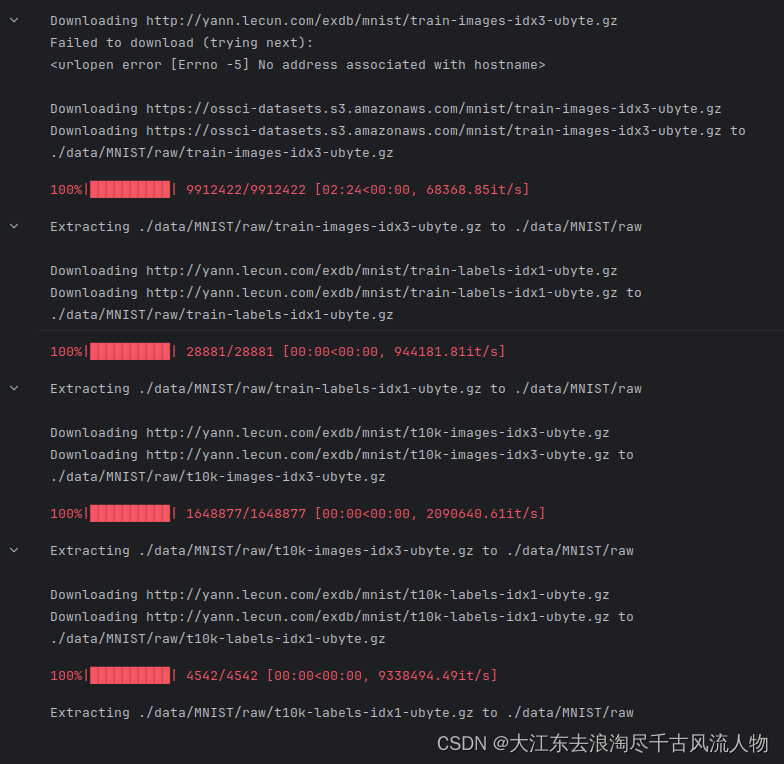
3. 0 数据集(训练与测试集)
3. 1 数据加载
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torchvision import datasets,transforms
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
### 首先读取数据
# - 分别构建训练集和测试集(验证集)
# - DataLoader来迭代取数据
# 定义超参数
input_size = 28 #图像的总尺寸28*28
num_classes = 10 #标签的种类数
num_epochs = 3 #训练的总循环周期
batch_size = 64 #一个撮(批次)的大小,64张图片
# 训练集
train_dataset = datasets.MNIST(root='./data',
train=True,
transform=transforms.ToTensor(),
download=True)
# 测试集
test_dataset = datasets.MNIST(root='./data',
train=False,
transform=transforms.ToTensor())
# 构建batch数据
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset,
batch_size=batch_size,
shuffle=True)
3. 2 函数实现:
# 卷积网络模块构建
# 一般卷积层,relu层,池化层可以写成一个套餐
# 注意卷积最后结果还是一个特征图,需要把图转换成向量才能做分类或者回归任务
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Sequential( # 输入大小 (1, 28, 28)
nn.Conv2d(
in_channels=1, # 灰度图
out_channels=16, # 要得到几多少个特征图
kernel_size=5, # 卷积核大小
stride=1, # 步长
padding=2, # 如果希望卷积后大小跟原来一样,需要设置padding=(kernel_size-1)/2 if stride=1
), # 输出的特征图为 (16, 28, 28)
nn.ReLU(), # relu层
nn.MaxPool2d(kernel_size=2), # 进行池化操作(2x2 区域), 输出结果为: (16, 14, 14)
)
self.conv2 = nn.Sequential( # 下一个套餐的输入 (16, 14, 14)
nn.Conv2d(16, 32, 5, 1, 2), # 输出 (32, 14, 14)
nn.ReLU(), # relu层
nn.MaxPool2d(2), # 输出 (32, 7, 7)
)
self.out = nn.Linear(32 * 7 * 7, 10) # 全连接层得到的结果
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = x.view(x.size(0), -1) # flatten操作,结果为:(batch_size, 32 * 7 * 7)
output = self.out(x)
return output
# 准确率作为评估标准
def accuracy(predictions, labels):
pred = torch.max(predictions.data, 1)[1]
rights = pred.eq(labels.data.view_as(pred)).sum()
return rights, len(labels)
3. 3 训练及其测试:
# 训练网络模型
# 实例化
net = CNN()
#损失函数
criterion = nn.CrossEntropyLoss()
#优化器
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器,普通的随机梯度下降算法
#开始训练循环
for epoch in range(num_epochs):
#当前epoch的结果保存下来
train_rights = []
for batch_idx, (data, target) in enumerate(train_loader): #针对容器中的每一个批进行循环
net.train() # 将模型设置为训练模式
output = net(data) # 使用模型进行前向传播
loss = criterion(output, target) # 计算损失
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播计算梯度
optimizer.step() # 更新参数
right = accuracy(output, target) # 计算当前批次的准确率
train_rights.append(right) # 将准确率保存起来
if batch_idx % 500 == 0: # 每500个批次进行一次验证
net.eval() # 将模型设置为评估模式
val_rights = [] # 存储验证集的准确率
for (data, target) in test_loader: # 在测试集上进行验证
output = net(data) # 使用模型进行前向传播
right = accuracy(output, target) # 计算验证集上的准确率
val_rights.append(right) # 将准确率保存起来
#准确率计算
train_r = (sum([tup[0] for tup in train_rights]), sum([tup[1] for tup in train_rights])) # 计算训练集准确率的分子和分母
val_r = (sum([tup[0] for tup in val_rights]), sum([tup[1] for tup in val_rights])) # 计算验证集准确率的分子和分母
print('当前epoch: {} [{}/{} ({:.0f}%)]\t损失: {:.6f}\t训练集准确率: {:.2f}%\t测试集正确率: {:.2f}%'.format(
epoch, batch_idx * batch_size, len(train_loader.dataset),
100. * batch_idx / len(train_loader),
loss.data,
100. * train_r[0].numpy() / train_r[1],
100. * val_r[0].numpy() / val_r[1])) # 打印当前进度和准确率信息

文章来源:https://blog.csdn.net/Darlingqiang/article/details/135138471
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!