Apollo Cyber RT:引领实时操作系统在自动驾驶领域的创新

?? 粉丝福利活动
-
?参与方式:通过连接报名观看课程,即可免费获取精美周边
-
??活动链接:《自动驾驶新人之旅》
-
📆 活动时间长期有效 | 课程姓名填写
鸽芷咕学号1111
完成后加博主微信填写问卷领取礼品,也可根据《活动步骤》 完成领取
🔥 注:可以拉取进度条观看,超过%50即可领取百度周边

?? 文章末尾扫码加入粉丝群,不定期发放粉丝福利,各种专业书籍免费赠送!
文章目录
引言
自动驾驶技术的不断演进引领着实时操作系统(RTOS)领域的创新。在众多自动驾驶平台中,Apollo Cyber RT stands out,成为实时操作系统中的佼佼者。Apollo Cyber RT 是一个开源、高性能的运行时框架,专为自动驾驶场景而设计。针对自动驾驶的高并发、低延迟、高吞吐量进行了大幅优化。
一、Cyber RT 介绍
Apollo Cyber RT 是一个开源、高性能的运行时框架,专为自动驾驶场景而设计。针对自动驾驶的高并发、低延迟、高吞吐量进行了大幅优化。
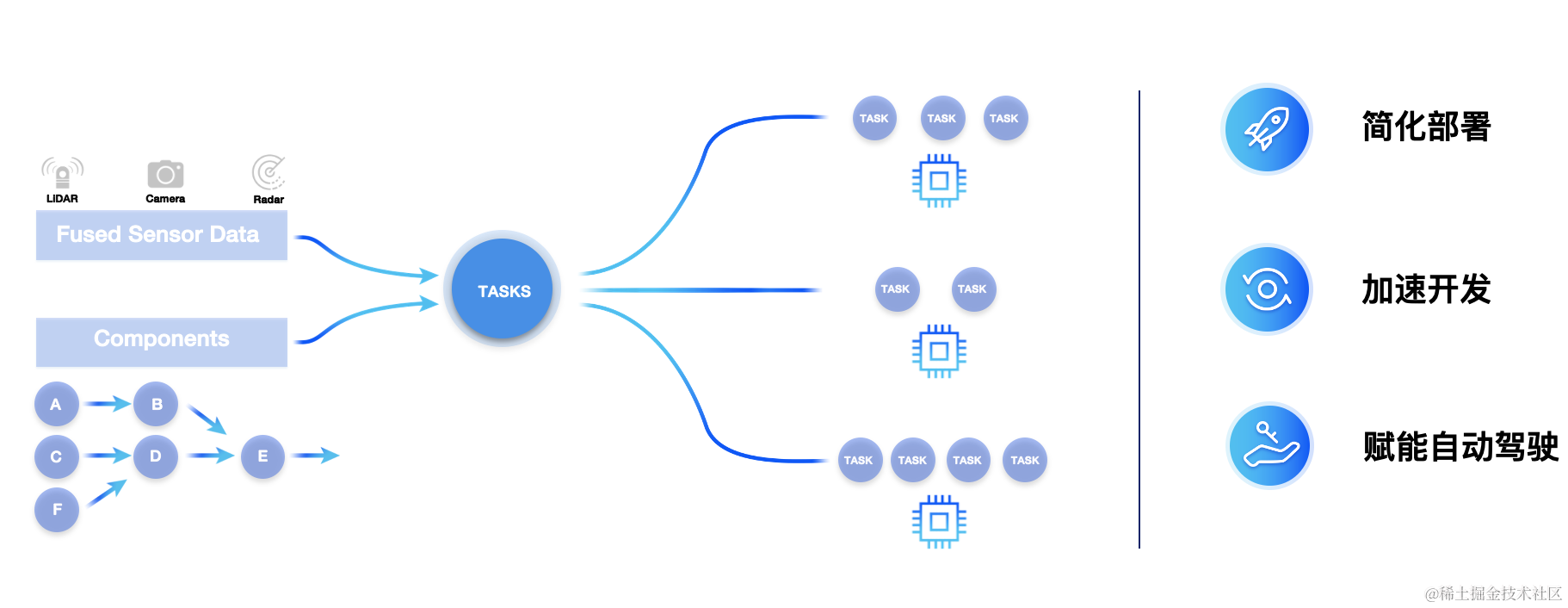
使用 Apollo Cyber RT 的主要好处:
- 加速开发 - 具有数据融合功能的定义明确的任务接口 - 一系列开发工具 - 大量传感器驱动程序 - 简化部署 - 高效自适应的消息通信 - 具有资源意识的可配置用户级调度程序 - 可移植,依赖更少 - 赋能自动驾驶 - 默认的开源运行时框架 - 为自动驾驶搭建专用模块
二、常用术语
- Component
在自动驾驶系统中,模块(如感知、定位、控制系统…)在 Cyber RT 下以 Component 的形式存在。不同 Component 之间通过 Channel 进行通信。Component 概念不仅解耦了模块,还为将模块拆分为多个子模块提供了灵活性。
- Channel
Channel 用于管理 Cyber RT 中的数据通信。用户可以发布/订阅同一个 Channel,实现 p2p 通信。
- Task
Task 是 Cyber RT 中异步计算任务的抽象描述。
- Node
Node 是 Cyber RT 的基本组成部分;每个模块都包含一个 Node 并通过 Node 进行通信。通过在节点中定义 Reader/Writer 或 Service/Client,模块可以具有不同类型的通信形式。
- Reader/Writer
Reader/Writer 通常在 Node 内创建,作为 Cyber RT 中的主要消息传输接口。
- Service/Client
除了 Reader/Writer 之外,Cyber RT 还提供了用于模块通信的 Service/Client 模式。它支持节点之间的双向通信。当对服务发出请求时,客户端节点将收到响应。
- Parameter
参数服务在 Cyber RT 中提供了全局参数访问接口。它是基于 Service/Client 模式构建的。
- 服务发现
作为一个去中心化的框架,Cyber RT 没有用于服务注册的主/中心节点。所有节点都被平等对待,可以通过“服务发现”找到其他服务节点。使用UDP用来服务发现。
- CRoutine
参考协程(Coroutine)的概念,Cyber RT 实现了 Coroutine 来优化线程使用和系统资源分配。
- Scheduler
为了更好地支持自动驾驶场景,Cyber RT 提供了多种资源调度算法供开发者选择。
- Message
Message 是 Cyber RT 中用于模块之间数据传输的数据单元。
- Dag文件
Dag 文件是模块拓扑关系的配置文件。您可以在 dag 文件中定义使用的 Component 和上游/下游通道。
- Launch文件
Launch 文件提供了一种启动模块的简单方法。通过在launch文件中定义一个或多个 dag 文件,可以同时启动多个模块。
- Record文件
Record 文件用于记录从 Cyber RT 中的 Channel 发送/接收的消息。回放 Record 文件可以帮助重现Cyber RT之前操作的行为。
- Mainboard
Cyber RT 的主入口,可以通过mainboard -d xxx.dag来启动一个模块进程。
- 开发工具
CyberRT 框架同时也提供了一系列实用的工具用来辅助日常开发, 包括命令行工具 cyber_monitor cyber_recorder 等。
?说明:这些工具需要运行在 Apollo Docker 环境内。
所有上述工具都依赖于 CyberRT 软件库,所以在使用这些工具之前,你需要通过如下方式来配置 CyberRT 工具的运行环境:
username@computername:~$: source /apollo/cyber/setup.bash
下面将着重介绍 cyber_monitor 的使用方法。
- 使用 Cyber Monitor 查看 Channel 数据实践
命令行工具cyber_monitor提供了终端中实时显示channel信息列表的功能。
1.1 运行 Cyber Monitor**
在 Apollo Docker 环境中执行如下命令运行cyebr_monitor:
username@computername:~$: cyber_monitor
1.2 实用命令
可以通过 -h 选项来获取帮助信息:
username@computername:~$: cyber_monitor -h
使用 -c 选项,可以让 cyber_monitor 只监测一个指定的 channel 信息:
username@computername:~$: cyber_monitor -c ChannelName
三、熟悉 Cyber Monitor 界面
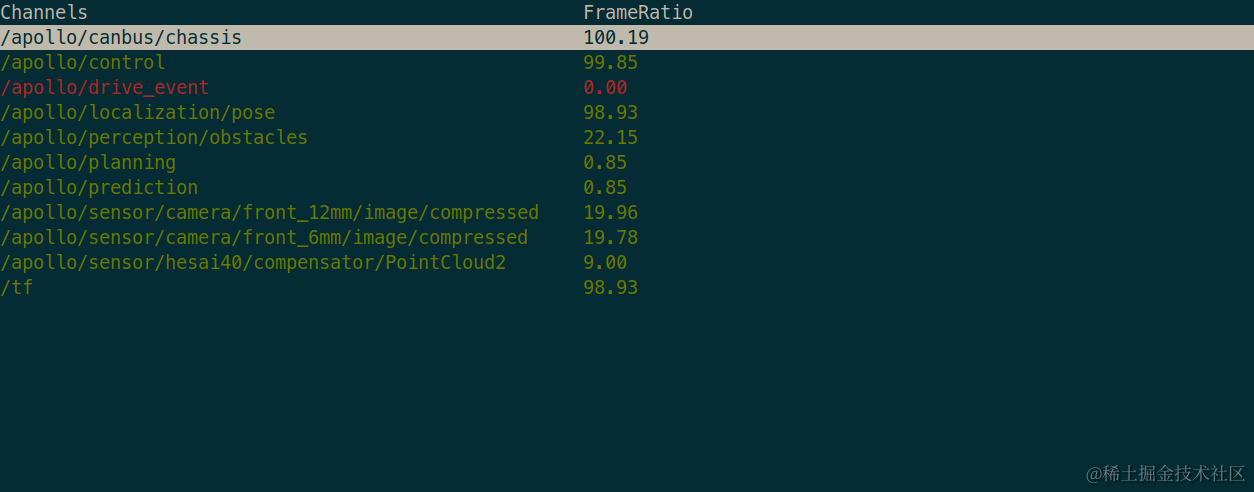
在启动cyber_monitor之后,会在终端中显示一个交互界面。cyber_monitor自动从拓扑中收集所有 channel 的信息并分两列显示(channel 名称,数据频率)
channel 信息默认显示为红色,当有数据流经 channel 时,对应的行就会显示成绿色,如下图所示:
3.1Cyber Monitor 交互命令介绍
ESC | q key ---- 退出
Backspace ---- 后退
h | H ---- 显示帮助页
PageDown | Ctrl+d ---- 上一页
PageUp | Ctrl+u ---- 下一页
Up, down or w, s keys ---- 上下移动当前的高亮行
Right arrow or d key ---- 进入高亮行, 显示高亮行数据的详细信息
Left arrow or a key ---- 从当前界面返回上一层界面
Enter key ---- 与d键相同
f | F ---- 显示数据帧频率
t | T ---- 显示channel消息类型
Space ---- 关闭|开启 channel (仅在channel有数据到达时有效; channel关闭后会变成黄色)
i | I ---- 显示channel的Reader和Writer信息
b | B ---- 显示channel消息内容
n | N ---- 显示消息中RepeatedField的下一条数据
m | M ---- 显示消息中RepeatedField的上一条数据
结语
在自动驾驶技术的浪潮中,Apollo Cyber RT以其卓越的实时性能和关键特性,成为推动自动驾驶系统不断进步的关键因素之一。其在实时操作系统领域的引领地位,为我们展示了未来自动驾驶的潜力和前景。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- C#使用SyntaxTree获取.cs文件中的属性名和注释
- web自动化(3)——项目实战之流程用例编写
- 【LeetCode】每日一题 2023_12_12 下一个更大元素 IV(堆,优先级队列/单调栈)
- 14、Citrix 云桌面HDX协议之TCP和UDP
- SpringBoot如何返回页面
- Redis面试题30
- WinEdt运行latex文件有eps图片编译不通过,各种报错解决办法
- Qt5 CMake环境配置
- 推荐系统中的 业务指标 UV
- web练习题题解