快速排序(快排) (C语言实现)
🔆欢迎来到我的【数据结构】专栏🔆
- 👋我是Brant_zero,一名学习C/C++的在读大学生。
- 🌏?我的博客主页????????Brant_zero的主页
- 🙏🙏欢迎大家的关注,你们的关注是我创作的最大动力🙏🙏
🍁前言
????????本篇博客学习内容是快速排序,快速排序有多种不同的版本和优化,我们这次的目的就是将这些版本都搞明白,废话不多说,我们开始。
? ? ? ? 篇幅较长,建议配合目录来浏览。
🍂目录🍂
一、快排介绍与思想
快速排序是C.R.A.Hoare于1962年提出的一种划分交换排序。它采用了一种分治的策略,通常称其为分治法。
- 1.先从数列中取出一个数作为基准数。
- 2.分区过程,将比这个数大的数全放到它的右边,小于或等于它的数全放到它的左边。
- 3.再对左右区间重复第二步,直到各区间只有一个数。
二、hoare版本
2.1 单趟过程
hoare版本即是最快速排序最原始的版本,我们先来看看下面的GIF来看看其单趟的交换过程。
单趟的目的:
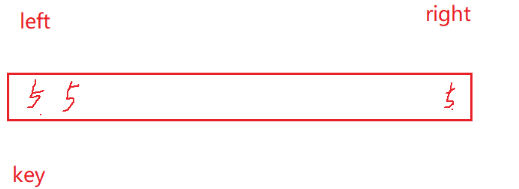
? ? ? ? 要求左边的key要小,右边的比key要大。

💡单趟过程:
- ?首先记录下keyi位置,然后left和right分别从数组两端开始往中间走。
- right先开始向中间行动,如果right处的值小于keyi处的值,则停止等待left走。
- left开始行动,当left找到可以keyi处小的值时,left和right处的值进行交换。
- 当两个位置相遇时,将相遇位置的值与keyi处的值进行交换,并将相遇的位置置为新的keyi。
我们来看看下面的代码,然后来分析其中容易出现的错误。
//单趟:
//首先keyi记录begin处的数据
int keyi = begin;
int left = begin;
int right = end;
//两个指针开始往中间行动
while (left < right)
{
//right先行动,一定要找到 大于 keyi位置的值
while(left < right && a[right] >= a[keyi])
{
right--;
}
//left行动,一定要找到 小于 keyi位置的值
while (left < right && a[left] <= a[keyi])
{
left++;
}
//到达指定位置,进行交换
swap(&a[left], &a[right]);
}
//走完上面的步骤后,两个下标会相聚在一个位置
//然后对这两个位置的值进行交换
swap(&a[right], &a[keyi]);
keyi = right;
//[begin,keyi-1],keyi,[keyi+1],end💡易错点:
- 如果keyi记录的最左边的数据,则要让right指针先行动,因为这样一定能要保证相遇的地方比keyi处的值要小。相遇位置就是R停下来的位置,好的情况是right处的值比keiy处的小,最坏的情况就是right走到了keyi的位置,那此时交换也坏没有影响。
- 找值时,left或right处的值一定要比keyi处的小(大),等于也不行,如果出现以下这种情况会死循环。
- 在left和right往中间找值时要判断left<right,如果不控制,left或right很容易走出数组。
2.2 多趟过程
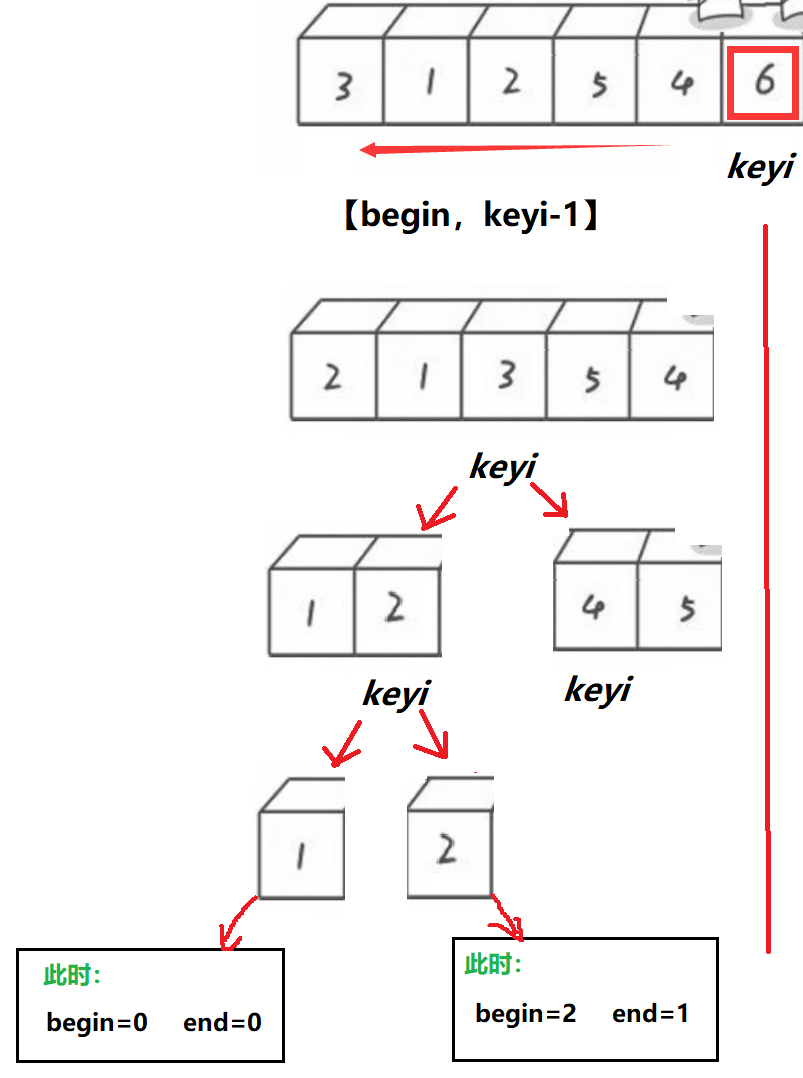
当上面的单趟走完后,我们会发现,keyi左边的全是小于a[keyi]的,右边全是大于a[keyi]的。

那我们一直重复这个单趟的排序,就可以实现对整个数组的排序了,这典型是一个递归分治的思想。
💡基本思路:
- 将keyi分为两边,分别进行递归,类似二叉树的前序遍历。
- 划分为[begin,keyi-1],? keyi,? ?[keyi+1,end].
- 递归结束条件:当begin == end? 或者是 数组错误(begin>end)时,则为结束条件。

2.3 多趟的实现
void QuickSort(int* a, int begin, int end)
{
if (begin >= end)
{
return;
}
//一趟的实现
int left = begin;
int right = end;
int keyi = left;
while (left < right)
{
//右边开始行动 一定要加上等于,因为快速排序找的是一定比它小的值
while (left < right && a[keyi] <= a[right])
{
right--;
}
//左边开始行动
while (left < right && a[left] <= a[keyi])
{
left++;
}
swap(&a[left], &a[right]);
}
swap(&(a[keyi]), &(a[right]));
keyi = right;
//[begin,keyi-1] keyi [keyi+1,end]
QuickSort(a, begin, keyi - 1);
QuickSort(a, keyi+1, end);
}效果检验:

三、 挖坑法
想必仍有人对hoare版本中,为什么左边置为keyi右边就要先走无法理解,这里有人就想出了一种新的快排版本,虽然算法思路一样,但是更有利于理解。
其次,这两种办法单趟走出来的结果不同,这就导致一些题目上对于快排单趟的结果不同,所以我们来理解一下这种挖坑法的算法思想。
我们先来看看下面的动画:
💡算法思路:
- 将begin处的值放到key中,将其置为坑位(pit),然后right开始行动找值补坑。
- right找到比key小的值后将值放入坑位,然后将此处置为新的坑。
- left也行动开始找值补坑,找到比key大的值将其放入坑位,置为新的坑。
- 当left与right相遇的时候,将key放入到坑位中。
- 然后进行[begin,piti-1],? piti,? ?[piti+1,end] 的递归分治。
因为有了hoare版本的实现,所以这里就不多赘述了,上面的算法思路已经将过程表述的很清楚了。
//快排 挖坑法
void QuickSort_dig(int* a, int begin, int end)
{
if (begin >= end)
return;
//一趟的实现
int key = a[begin];
int piti = begin;
int left = begin;
int right = end;
while (left < right)
{
while (left < right && a[right] >= key)
{
right--;
}
a[piti] = a[right];
piti = right;
while (left < right && a[left] <= key)
{
left++;
}
a[piti] = a[left];
piti = left;
}
//补坑
a[piti] = key;
//[begin, piti - 1] piti [piti + 1, end]
QuickSort_dig(a, begin, piti - 1);
QuickSort_dig(a, piti + 1, end);
}?效果检验:

四、 前后指针法
前后指针法相比于hoare和挖坑法,不论是算法思路还是实现过程都有很大提升,也是主流的一种写法,这里我们一样来看看单趟的过程吧。

💡算法思路:
- cur位于begin+1的位置,prev位于begin位置,keyi先存放begin处的值。
- cur不断往前+1,直到cur >= end时停止循环。
- 如果cur处的值小于key处的值,并且prev+1 != cur,则与prev处的值进行交换。
- 当循环结束时,将prev处的值与keyi的值相交换,并将其置为新的keyi位置。
代码实现:
void QuickSort_Pointer(int* a, int begin, int end)
{
if (begin >= end)
{
return;
}
//数据区间大与10,进行快速排序
int prev = begin;
int cur = begin + 1;
int keyi = begin;
//三数取中后对keyi位置的值进行交换
int mid = GetMid(a, begin, end);
swap(&a[mid], &a[keyi]);
while (cur <= end)
{
//cur一直往前走,如果碰到小于并且prev++不等于cur则交换,
//因为如果prev+1 == cur 则会发生自己与自己交换的情况
if (a[cur] < a[keyi] && ((++prev) != cur))
{
swap(&a[cur], &a[prev]);
}
cur++;
}
swap(&a[prev], &a[keyi]);
keyi = prev;
//开始进行递归
QuickSort_Pointer(a, begin, keyi - 1);
QuickSort_Pointer(a, keyi + 1, end);
}注意点:
- 在遍历的过程中,cur是不断向前的,只是cur处的值小于keyi处的值时,才需要进行交换判断一下。
- 在cur位置处的值小于keyi处的值时,要进行判断prev++是否等于cur,如果等于,那么会出现自己与自己交换的情况。如果相等,则不进行交换。
五、 快排的优化
5.1 三数取中选key
在实现了快速排序之后,我们发现,keyi的位置,是影响快速排序效率的重大因素。因此有人采用了三数取中的方法解决选keyi不合适的问题。
三数取中
即知道这组无序数列的首和尾后,我们只需要在首,中,尾这三个数据中,选择一个排在中间的数据作为基准值(keyi),进行快速排序,即可进一步提高快速排序的效率。
//三数取中
int GetMid(int *a,int begin, int end)
{
int mid = (begin + end) / 2;
if (a[begin] > a[end])
{
if (a[end] > a[mid])
return end;
else if (a[mid] > a[begin])
return begin;
else
return mid;
}
else
{
if (a[end] < a[mid])
return end;
else if (a[end] < a[begin])
return begin;
else
return mid;
}
}?这样,中间值的下标就被返回过来了,然后我们将这个位置换为新的keyi,就可以了。

5.2 小区间改造
由于快速排序是递归进行的,当递归到最后几层时,此时数组中的值其实已经接近有序,而且这段区间再递归会极大占用栈(函数栈帧开辟的地方)的空间,

接下来,我们对其进行优化,如果区间数据量小于10,我们就不进行递归快速排序了,转而使用插入排序。
我们来看看使用了小区间改造优化和三数取中优化后的快排。
void QuickSort_Pointer(int* a, int begin, int end)
{
if (begin >= end)
{
return;
}
//数据区间大与10,进行快速排序
if (end - begin > 10)
{
int prev = begin;
int cur = begin + 1;
int keyi = begin;
//三数取中后对keyi位置的值进行交换
int mid = GetMid(a, begin, end);
swap(&a[mid], &a[keyi]);
while (cur <= end)
{
if (a[cur] < a[keyi] && ((++prev) != cur))
{
swap(&a[cur], &a[prev]);
}
cur++;
}
swap(&a[prev], &a[keyi]);
keyi = prev;
//开始进行递归
QuickSort_Pointer(a, begin, keyi - 1);
QuickSort_Pointer(a, keyi + 1, end);
}
else
{
//左闭右闭
InsertSort(a, end - begin + 1);
InsertSort(a + begin, end - begin + 1);
}
}💡注意点:
- 插入排序之后两个参数,一个是数据集合的起点地址,第二个是数据量。
- 使用插入排序时,我们要传入待排序数据集合的其实地址,即a+begin,如果传入的是a,那排序的永远都是数组a的前n个区间。
- 插入排序传入的是数据个数,所以我们要将end-begin加上1之后才传入。快速排序中end、begin都是闭区间(即数组下标)。
六、 快速排序改非递归版本
因为函数栈帧是在栈(非数据结构上的栈)上开辟的,所以容易出现栈溢出的情况,为了解决这个问题,我们除了上面两种优化,还可以将快速排序改为非递归版本,这样空间的开辟就在堆上了,堆上的空间比栈要多上许多。
为了实现快速排序的非递归版本,我们要借助我们以前实现的栈,来模拟非递归。
💡实现思路:
- 入栈一定要保证先入左再入右。
- 取两次栈顶的元素,然后进行单趟排序。
- 划分为[left , keyi - 1] keyi [ keyi +? 1 , right ] 进行右、左入栈。
- 循环2、3步骤直到栈为空。
int PartSort(int * a, int begin, int end)
{
int prev = begin;
int cur = begin + 1;
int keyi = begin;
int mid = GetMid(a, begin, end);
swap(&a[mid], &a[keyi]);
while (cur <= end)
{
if (a[cur] < a[keyi] && ((++prev) != cur))
{
swap(&a[cur], &a[prev]);
}
cur++;
}
swap(&a[prev], &a[keyi]);
return prev;
}
void QuickSortNonR(int* a, int begin, int end)
{
ST st;
StackInit(&st);
//先入右 再入左
StackPush(&st, end);
StackPush(&st, begin);
while (!StackEmpty(&st))
{
//那出栈 则是先出左再出右
int left = StackTop(&st);
StackPop(&st);
int right = StackTop(&st);
StackPop(&st);
int keyi = PartSort(a, left, right);
//[left, keyi - 1] keyi[keyi + 1, right];
//栈里面的区间 都会进行单趟排序分割
if (keyi + 1 < right)//说明至少还有两个数据
{
//入右然后入左
//才能保证取出时 顺序不变
StackPush(&st, right);
StackPush(&st, keyi + 1);
}
//如果小于,说明至少还有两个元素 待排序
if (left < keyi - 1)
{
//入右然后入左
StackPush(&st, keyi - 1);
StackPush(&st, left);
}
}
StackDestory(&st);
}效果演示:

总结
本篇介绍了hoare法、挖坑法、前后指针法,以及两种快排的优化方式和非递归版本,还是非常有难度的,检验大家实现的时候多看看动图,然后自己尝试写一下单趟的过程,再结合博客的内容理解快排递归的思路。这篇的内容相对硬核,光看是很难理解的,尤其是接触hoare版本和非递归版本,希望大家动手配合调试、画图来实现。
好的,本篇博客到此就结束了,下篇博客会更新归并排序的相关内容,希望大家持续关注,可以的话点个免费的赞或者关注一下啊,你们反馈是我更新最大的动力。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!